Робот и автомат в чем разница
Начиная с конца 80-х годов прошлого века, инженеры стремятся максимально нивелировать разницу между автоматическими и механическими трансмиссиями.
Одним из результатов такой работы стало появление роботизированной «механики», которая на сегодняшний день присутствует в модельных линейках почти всех крупных автопроизводителей.
Какими же преимуществами и недостатками обладает такой «робот» в сравнении с классическим «автоматом»?
Недостатки и особенности робота
Начнем с конструктивных особенностей «робота», который по сути является механической коробкой передач, но без третьей педали. За выжим сцепления в такой КП отвечает электропривод (актуатор).
В отличие от автоматической коробки с гидротрансформатором, конструкция роботизированной «механики» значительно проще, поэтому и дешевле в производстве. Последнее преимущество сыграло главную роль в быстром появлении «роботов» на многих недорогих моделях.
Но как оказалось, производители немного поспешили с массовым запуском такой трансмиссии на рынок. Все дело в том, что большинство «роботов», особенно при активной езде, не обеспечивали плавного переключения передач, раздражая водителей рывками и задержками при смене ступеней, а также откатом при старте на подъеме. Кроме того, роботизированные КП не могли похвастаться высокой надежностью.
Роботизированная коробка передач с двойным сцеплением
Улучшить плавность «роботов» взялся концерн Volkswagen, внедрив на своих моделях в середине 2000-х годов преселективный «робот» с двумя сцеплениями (DSG). В таких трансмиссиях четные и нечетные передачи, расположены на отдельных валах, оснащенных индивидуальными сцеплениями.
Новый тип КП хоть и стал совсем недешевым в производстве, но избавился от медлительности первых «роботов» и даже смог обеспечить автомобилю динамику разгона лучше, чем у версий с обычной «механикой». В дальнейшем многие ведущие автопроизводители также начали переходить на подобные “автоматы”, заказывая их у ведущих производителей трансмиссий.
Впрочем, в некоторых случаях остались вопросы к надежности отдельных КП данного типа. Но в сравнении с прежним «роботом» плавность и скорость переключений выросла просто несравнимо.
В подтверждение этого превосходства отметим, что в настоящий момент большинство брендов уже отказались от применения «роботов» на базе классических механических КП и в ближайшем будущем такая трансмиссия может уйти в историю.
Помимо «скорострельности», современные роботизированные КП превосходят классические «автоматы» и по экономичности. «Роботы» вполне способны помогать двигателю расходовать топливо на уровне версий с «механикой».
Классический автомат
Казалось бы, будущее «гидротрансформаторных автоматов» предрешено, тем не менее, «старая гвардия» не спешит сдавать свои позиции.
Во-первых, развитие таких трансмиссий также не стоит на месте. Хотя у многих автолюбителей «классическая» АКП ассоциируется с морально устаревшими четырехступенчатыми «автоматами», которые не спешат переключать скорости и не особо заботятся об экономии топлива.
На самом деле такие коробки передач встречаются сейчас только на бюджетных моделях, да и то довольно редко. Подавляющая часть «автоматов» сегодня имеют минимум шесть скоростей и предлагают функцию ручной смены передач.
Более такого, производители активно увеличивают количество ступеней в таких КП, чтобы добиться лучшей экономичности. На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
Большинство «роботов» не могут справиться с большим крутящим моментом мощных двигателей. Конечно, можно привести пример нескольких суперкаров с роботизированными КП, включая 1000-сильный Bugatti Veyron, но это скорее исключения, подтверждающие правило, тем более, что владельцы спортивных авто не особо беспокоятся о длительности ресурса таких КП.
Также роботизированными трансмиссиями не оснащаются полноценные внедорожники, потому что на сроке службе «роботов» негативно сказываются продолжительные пробуксовки на бездорожье и рывки из-за изменения сцепных свойств при контакте четырех колес с дорогой. Все это по большому счету не очень полезно и для обычных АКП.
Все это по большому счету не очень полезно и для обычных АКП.
Автомат или робот
Разница между «классическим автоматом» и «роботизированной» механикой с каждым годом уменьшается. Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
Похожие записи
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Выбор коробки передач. Что лучше, механика, автомат, вариатор или робот? / Полезные статьи / Атлант М
Механическую коробку передач выбрать, или автоматическую? А если автоматическую, то обычный автомат, «робот», или вариатор? Такие вопросы очень популярны в среде автолюбителей при выборе будь-то нового, будь-то подержанного автомобиля. Интернет заполнен на тему коробок передач, причем как полезной информацией, так и информационным «хламом». Отличить полезное от хлама может только профессионал в теме. Такой у него, у Интернета, недостаток. Поэтому я решил написать немножко строк про все эти механики, автоматы, роботы и вариаторы, причем, не погружаясь «в гайки», чтобы любой читатель, вне зависимости от уровня технической грамотности, смог понять, о чем идет речь, и что ему, ЛИЧНО, будет лучше.
Отличить полезное от хлама может только профессионал в теме. Такой у него, у Интернета, недостаток. Поэтому я решил написать немножко строк про все эти механики, автоматы, роботы и вариаторы, причем, не погружаясь «в гайки», чтобы любой читатель, вне зависимости от уровня технической грамотности, смог понять, о чем идет речь, и что ему, ЛИЧНО, будет лучше.
Механическая коробка передач
Начнем с «механики». В случае механической коробки передач, под капотом имеем двигатель, «черный ящик» коробки, со всеми её валами, шестеренками, синхронизаторами и включающими муфтами. А между двигателем и коробкой узел сцепления. На педаль сцепления нажали – двигатель и коробку полностью разъединили. Пока вы удерживаете педаль сцепления нажатой, силовой агрегат и коробка передач ничем не связаны и вы можете включить любую передачу, исходя из условий движения. Вот это и является основным плюсом «механики», особенно для «продвинутого» водителя, который знает и умеет применять приемы активного управления автомобилем. Например, в случае переднеприводного авто, «упереться» двигателем в колеса передней оси перед маневром. А в случае заднего привода, «довинтить» машину в вираж, перейти на более крутую траекторию. Но как часто случается, недостатки являются продолжением достоинств. Активно «драйвануть», конечно, это приятно, а вот орудовать педалью сцепления и рычагом переключения в бесконечных пробках мегаполисов – не самое приятное занятие. Вот это и есть минус.
Например, в случае переднеприводного авто, «упереться» двигателем в колеса передней оси перед маневром. А в случае заднего привода, «довинтить» машину в вираж, перейти на более крутую траекторию. Но как часто случается, недостатки являются продолжением достоинств. Активно «драйвануть», конечно, это приятно, а вот орудовать педалью сцепления и рычагом переключения в бесконечных пробках мегаполисов – не самое приятное занятие. Вот это и есть минус.
Гидромеханическая автоматическая коробка передач, или «обычный автомат»
Чтобы не управлять коробкой «врукопашную», и не особо напрягаться ручками-ножками в плотном городском потоке, и придумана автоматическая коробка передач. Сначала появилась гидромеханическая АКП (автоматическая коробка передач). Для того, чтобы понять, как она работает, нужен… вентилятор (обычный, бытовой) и какая-нибудь детская вертушка-игрушка с винтом-пропеллером, похожим на вентиляторный. Включите вентилятор и поднесите к нему эту игрушку.
Для чего эти страсти? А для того, чтобы плавно трогаться, как можно плавнее переключать передачи безо всякого сцепления «от ноги» водителя, как в «механике» между двигателем и «черным ящиком» с шестеренками. Ведь для того, чтобы тронуться, нужно плавненько соединить мотор и «черный ящик» коробки. Вот гидротрансформатор, совершенно не теряя усилий от двигателя, это и делает. А жидкость нужна для того, чтобы через нее передавать вращательное движение. А то воздух, он не справится. Плотность воздуха мала для передачи энергии на таких скоростях вращения. Что же касается переключений передач, то они выполняются по команде блока управления, автоматически, в зависимости от условий движения.
В общем, всё в гидромеханической АКП, вроде, хорошо. Сама едет, сама переключается. Водителю остается только жать педали «газа» и тормоза, да селектор «автомата» щелкать между «Паркинг», «Драйв» и «Назад». Причем работает эта штука вполне надежно. Если не изображать из себя Шумахера на АКП, и соблюдать Регламент ТО, то и не ломается.
Но недостатки есть. Главные среди них – ощутимые моменты автоматических переключений диапазонов АКП в «черном ящике» с шестеренками, и более высокое потребление горючего, в сравнении с «механикой» при одинаковых силовых агрегатах. Потребность в большем комфорте, возраставшие цены на топливо и забота об экологии стимулировали инженеров подумать на тему автоматизации ещё раз.
«Вариатор». Вариаторная АКП
Чтобы понять, до чего додумались инженеры, представьте… велосипед. Педали, две звездочки, а между ними – цепь. На заднем колесе чуть более продвинутых моделей есть несколько звездочек, чтобы можно было передачи переключать. Переключил на большую звездочку – крутить педали легче и можно ехать в крутую горку, только чаще крутить педали приходится. Скорость велосипеда при этом падает, но это плата за высокую тягу. А если ехать по ровной местности, или с горы, то включил звездочку сзади поменьше – крутишь педали реже, а скорость велосипеда растет. Теперь представьте, что на велосипеде вместо цепной передачи стоит ременная. То есть, вместо цепи – ремень, вместо звездочек — шкивы, только вместо кучи звездочек на заднем колесе – ОДИН шкив, но его диаметр может… плавно изменяться.
Переключил на большую звездочку – крутить педали легче и можно ехать в крутую горку, только чаще крутить педали приходится. Скорость велосипеда при этом падает, но это плата за высокую тягу. А если ехать по ровной местности, или с горы, то включил звездочку сзади поменьше – крутишь педали реже, а скорость велосипеда растет. Теперь представьте, что на велосипеде вместо цепной передачи стоит ременная. То есть, вместо цепи – ремень, вместо звездочек — шкивы, только вместо кучи звездочек на заднем колесе – ОДИН шкив, но его диаметр может… плавно изменяться.
Представили? Вот, перед вами, вариаторная автоматическая коробка передач! Один шкив – постоянного размера, второй – переменного и его диаметр меняется по команде блока управления, подстраиваясь под условия движения. А между ними – прочнейший «ремень», представляющий собой или многозвенную цепь, или составной, из металлических пластин. Плавное изменение диаметра одного из этих шкивов приводит к тому, что моменты переключений АКП не ощущаются вовсе. Ведь их попросту нет, этих моментов переключений. J Изумительно комфортная штука в работе, этот вариатор! Но и в нем не обошлось без недостатков, существенных и помельче.
Ведь их попросту нет, этих моментов переключений. J Изумительно комфортная штука в работе, этот вариатор! Но и в нем не обошлось без недостатков, существенных и помельче.
«Вариаторы» недёшевы. Также они категорически не любят пробуксовок. Из-за того, что между «черным ящиком» со шкивами и ремнем приходится ставить все тот же гидротрансформатор (трогаться-то нужно!), а также из-за механического трения в «черном ящике», потери энергии достаточно велики, расход топлива, в с сравнении с «обычной» АКП, немногим меньше. А может быть и больше. А еще приходится с программами двигателя «поколдовать», чтобы он не гудел, как троллейбус на постоянных оборотах при разгонах. Ведь ступенчатого переключения передач – нет. Поэтому инженерам опять открылся простор для изысканий.
«Роботы». Роботизированные коробки передач
Чтобы преодолеть недостатки гидромеханических и вариаторных АКП, несколько конструкторских школ обратили свое внимание на… обычную механическую коробку. А что если заменить ножной привод сцепления электроприводом, рычаг переключения передач и тяги к «черному ящику» с шестеренками электрическими исполнительными механизмами, и управлять сцеплением и переключениями с помощью электронного блока, исходя из условий движения? Конечно, легко и скоро только сказка сказывается. Над программами управления для этого блока и надежностью электропривода инженерам пришлось крепко повозиться, но автоматизированные механические коробки передач, которые журналисты окрестили «роботизированными», или «роботами», пошли в серийное производство для автомобилей малых классов. Они представляют собой именно классическую «механику», в которой управление сцеплением и переключениями передач осуществляется электронным блоком.
А что если заменить ножной привод сцепления электроприводом, рычаг переключения передач и тяги к «черному ящику» с шестеренками электрическими исполнительными механизмами, и управлять сцеплением и переключениями с помощью электронного блока, исходя из условий движения? Конечно, легко и скоро только сказка сказывается. Над программами управления для этого блока и надежностью электропривода инженерам пришлось крепко повозиться, но автоматизированные механические коробки передач, которые журналисты окрестили «роботизированными», или «роботами», пошли в серийное производство для автомобилей малых классов. Они представляют собой именно классическую «механику», в которой управление сцеплением и переключениями передач осуществляется электронным блоком.
Главное достоинство большинства «роботов» — высокая топливная экономичность, для чего они, прежде всего и создавались. Ведь компьютер с совершенной программой управления никогда не ошибается, никогда не сердится, не впадает в депрессию и никогда не устает, в отличие от водителей с разным опытом, мастерством и стойкостью к физическим и моральным нагрузкам. Поэтому автомобиль с «роботом» расходует меньше топлива, чем такое же авто с любой другой коробкой, включая «механику». А ещё такой «робот» дешевле любой другой АКП в покупке, при заказе нового авто. Вот так.
Поэтому автомобиль с «роботом» расходует меньше топлива, чем такое же авто с любой другой коробкой, включая «механику». А ещё такой «робот» дешевле любой другой АКП в покупке, при заказе нового авто. Вот так.
Но и тут без недостатков не обходится. Как ни старались инженеры оптимизировать моменты переключений, «клевки» автомобиля носом при буйных разгонах весьма ощутимы. Такие «роботы» для экономичной и спокойной езды, а не для «шумахера». Еще они не любят пробуксовок в агрегатах сцепления. Пришлось инженерам опять поднапрячься.
«Роботы» класса DSG от Volkswagen
Представьте себе автомобиль с шестиступенчатой механической коробкой передач. Представили? Только коробка эта не совсем обычна. Точнее, совсем не обычна. Она как бы состоит из ДВУХ агрегатов, причем 1-я, 3-я и 5-я передачи связаны с двигателем через один модуль сцепления, а 2-я, 4-я и 6-я – через другой. Получается что-то вроде «два в одном». А теперь представьте, что все управление – полностью автоматическое, электронное и электрическое. Причем, когда вы разгоняетесь, например, на 2-й передаче, блок управления УЖЕ ВКЛЮЧИЛ 3-ю, и только выжидает наилучший момент чтобы сделать моментальный «клац-клац» независимыми сцеплениями, чтобы «отпустить» вторую передачу и «врубить» заранее подготовленную 3-ю. Переключения в такой АКП занимают не просто доли секунды, а миллисекунды! Водитель и пассажиры этих переключений просто не замечают, и разгон плавен, и очень быстр. Например, в DSG, которую первым в мире поставил на конвейер концерн VOLKSWAGEN, моменты переключений занимают 7 миллисекунд. Это гораздо быстрее, чем вы мигаете глазами. Поэтому никаких рывков и толчков, как у «роботов» описанных выше, нет.
Причем, когда вы разгоняетесь, например, на 2-й передаче, блок управления УЖЕ ВКЛЮЧИЛ 3-ю, и только выжидает наилучший момент чтобы сделать моментальный «клац-клац» независимыми сцеплениями, чтобы «отпустить» вторую передачу и «врубить» заранее подготовленную 3-ю. Переключения в такой АКП занимают не просто доли секунды, а миллисекунды! Водитель и пассажиры этих переключений просто не замечают, и разгон плавен, и очень быстр. Например, в DSG, которую первым в мире поставил на конвейер концерн VOLKSWAGEN, моменты переключений занимают 7 миллисекунд. Это гораздо быстрее, чем вы мигаете глазами. Поэтому никаких рывков и толчков, как у «роботов» описанных выше, нет.
ГАРАНТИЯ НА DSG 7 SPEED увеличена до 5 лет или 150 000 км пробега:
Концерн VOLKSWAGEN AG, идя на встречу пожеланиям клиентов, с целью сохранения уверенности покупателей в автомобилях концерна, осуществляет за счет завода изготовителя бесплатный ремонт или замену узлов коробки передач DSG 7 DQ 200 в срок до 5 лет или до достижения 150 000 км пробега с момента передачи автомобиля первому покупателю. При обращении владельца автомобиля к официальным дилерам с претензией по работе DSG 7 DQ 200 бесплатно будут проводиться диагностика и при необходимости бесплатный ремонт в соответствии с актуальными техническими рекомендациями концерна.
При обращении владельца автомобиля к официальным дилерам с претензией по работе DSG 7 DQ 200 бесплатно будут проводиться диагностика и при необходимости бесплатный ремонт в соответствии с актуальными техническими рекомендациями концерна.
Точно так же такие «роботизированные» коробки переключаются не только «вверх», но и вниз. Блок управления коробкой внимательно «наблюдает» за действиями водителя с помощью датчиков на педалях и рулевом механизме, и заранее подготавливает наилучшую передачу для целей водителя.
Если я скажу, что такие «роботы» класса VW DSG работают блестяще, то это не будет преувеличением, причем не только с точки зрения переключений передач. Их блоки управления тоже не «устают» и не «ошибаются», поэтому потребление топлива у автомобиля с DSG, особенно в городском цикле, меньше, чем с любой другой коробкой, включая «механику».
Что же касается недостатков, то их мало, но они, увы, есть: Высокая стоимость и неприемлемость пробуксовок в агрегатах сцепления (впрочем, какое сцепление это любит?).
Резюме:
Как видите, однозначно сказать, что лучше, и что хуже, нельзя. Каждому свое!
|
механика» или «робот» |
Если вы активный драйвер, понимаете толк в скоростном и маневренном управлении автомобилями |
|
традиционная гидромеханическая АКП |
Если вы выбираете внедорожник, хотите комфорта в городе, но и за город выбираетесь, причем, не только на шоссе |
|
простой «робот» |
Если вы спокойный водитель, ездите по городу, выбираете малый автомобиль и экономичность для вас очень важна – то более простой «робот» вас вполне устроит |
| «Вариатор» | этот тип коробки будет хорош для поклонников предельной плавности хода |
Вот такие варианты.
С Уважением, Денис Козлов (ДОК)
Ваш эксперт в выборе и обслуживании автомобиля
«Робот» или «автомат», «ручка» или «механика»: как правильно называть коробки передач?
Вот с науки и начнём, и не с какой-нибудь, а с «Теории автоматического управления», именно она поможет нам разобраться с коробками – основы ТАУ дают студентам практически любой инженерной специальности. Нет-нет, мы вовсе не собираемся грузить читателей принципами работы регулятора Уатта и описанием пропорционально-интегрального закона как одного из принципов автоматического регулирования систем. ТАУ предлагает куда как более простые постулаты, некоторые из которых мы адаптируем для пояснения несложного, казалось бы, и ясного как день вопроса: чем отличается автомобиль с ручной коробкой от автомобиля с автоматической?
С ответом спешить не будем, а уточним, что ТАУ определяет разбивку всех систем по типу управления на следующие: «ручные», «полуавтоматические» и «автоматические». Что это означает в приложении к автомобилю? Это означает, что если водитель:
Что это означает в приложении к автомобилю? Это означает, что если водитель:
- А – сам выбирает передачу — скажем, решает, что вот сию секунду нужно перейти с третьей на вторую или с шестой на седьмую, и
- Б – сам переключает ступень с помощью механического привода, на одном конце которого – рука водителя, на другом – каретка синхронизатора…
…то коробка по критерию «тип управления» классифицируется как «ручная».
Сразу перескакиваем на третий случай – «автоматические». Простая логика подсказывает обратное: если электроника думает за водителя по полной программе, при этом
- А – выбирает ступень, то есть, сама решает, куда переключиться в данный момент – вверх или вниз, и
- Б – сама осуществляет это переключение…
…стало быть, перед нами коробка передач, которая по критерию «тип управления» классифицируется как «автомат» или «автоматическая».
Селектор коробки передач автомобиля Opel Insignia Country Tourer 2018С вариантом «полуавтоматическим» сейчас знакомы большей частью гонщики — скажем, управляющие болидами Формулы-1. За водителем в данном случае остаётся только выбор ступени: водитель даёт сигнал – замыкает контакт, а электроника, следуя этому указанию, уже производит сам процесс включения передачи с помощью сервопривода.
За водителем в данном случае остаётся только выбор ступени: водитель даёт сигнал – замыкает контакт, а электроника, следуя этому указанию, уже производит сам процесс включения передачи с помощью сервопривода.
Из всего изложенного напрашивается простой вывод: тип коробки передач по критерию «тип управления» не подразумевает ровным счётом никаких конструктивных особенностей той части коробки, в которой трансформируется момент. Это важно, потому что одна и та же коробка, как мы покажем ниже, по критерию «тип управления» будет «автоматической», а по критерию «тип трансформации момента» — «механической». Может ли такое быть?
“Механическая” и “ручная” — это одно и то же?
Да, ещё как может! Только для начала давайте зададимся вопросом, правильно ли называть «ручные» коробки «механическими» — вроде бы, это давно вошло в обиход. Да, мы к этому привыкли, поскольку в 80-е, 90-е и первой половине 2000-х широкий потребитель практически не знал других автоматических коробок кроме гидромеханических, представляющих собой пару гидротрансформатора и планетарного редуктора.
Здесь оговоримся сразу: в рамках настоящего материала мы не рассматриваем эволюцию конструкции коробок. Малой серией порой выпускали такую всячину, что народ недоумевал: зачем? В любом случае, об этом мы напишем отдельную статью, там будет о чём поговорить. Произошедшая подмена «ручные — значит механические» ничего плохого не несёт, тем более, что во многом это отражало потребительскую картину автомобильного мира в три десятилетия до середины двухтысячных.
Механическая коробка передач МТ6 OpelМежду тем, слово «механический» по критерию «тип преобразования момента» означает, что крутящий момент в коробке увеличивается или уменьшается без применения пневматических, электрических или иных устройств, кроме механических. Проще говоря, крутящий момент, поступающий в коробку, меняется за счёт взаимодействия двух любых «железок». Обратите внимание, что мы говорим «железки», а не «шестерёнки»: этот критерий группировки коробок передач уже напрямую увязан с конструкцией агрегата.
Трёхвальные и двухвальные
Итак, конструкция. Начнём с «ручных» коробок, поскольку здесь есть свои особенности. В применении к ним мы часто слышим: «двухвальная» или «трёхвальная». Это очень интересный термин, который поменял значение с течением времени. Когда-то он означал количество валов, участвующих в передаче мощности на ступенях переднего хода. Сейчас он означает количество пар шестерен, через которые передаётся момент на одной передаче переднего хода. У трёхвальных коробок таких пар две: шестерни первой пары размещаются на входном и промежуточном валах, шестерни второй – на промежуточном и выходном. У двухвальных коробок такая пара одна. То есть, количество валов, физически имеющихся в коробке, здесь совершенно ни при чём.
Механическая коробка передач Mercedes-Benz GLAНапомним, что ещё задолго до появления фольксвагеновских DSG, где ведомые шестерни чётных передач размещаются на одном валу, а нечётных – на другом, ручные коробки стали делать с двумя выходными валами – просто для того, чтобы увеличение количества ступеней не влияло на увеличение длины, а проще говоря, чтобы коробку было легче разместить под капотом при поперечной компоновке силового агрегата. Само собой, ни о каком «преселективном» включении ступеней речи здесь не шло.
Само собой, ни о каком «преселективном» включении ступеней речи здесь не шло.
Трёхвальные коробки – традиционные, от них стали отказываться по мере вытеснения продольной компоновки компоновки подкапотного пространства на легковых автомобилях от А до D класса поперечной. Типичный её признак – наличие передачи с передаточным числом 1,0, когда момент передаётся без участия шестерен: минуя промежуточный вал. Передача эта – компромиссная, поскольку при расчёте это число всегда получается или больше, или меньше единицы. Со временем всё большую территорию стали отвоёвывать двухвальные коробки, которые, с одной стороны, дают меньший габарит, а с другой, инженеры, проектируя их, избавлены от необходимости вынужденного применения передачи 1,0.
«Гидро» без «механики»
Возвращаемся к группировке коробок по критерию «трансформация крутящего момента». Наличие гидравлического звена (гидротрансформатора), в котором на части режимов изменяется момент, автоматически относит коробку к типу «гидромеханических», при этом совершенно неважно, как устроена та часть коробки, которая идёт после гидротрансформатора – это может быть и планетарный редуктор, и… вариатор. Да-да, эпитет «гидромеханический» настолько прочно закрепился за классической конструкцией «автомата», состоящего из гидротрансформатора и планетарного редуктора, что по инерции ни к какой другой коробке мы его уже не применяем. А зря.
Да-да, эпитет «гидромеханический» настолько прочно закрепился за классической конструкцией «автомата», состоящего из гидротрансформатора и планетарного редуктора, что по инерции ни к какой другой коробке мы его уже не применяем. А зря.
Эксперты Росстандарта при выдаче сертификата, позволяющего продавать новые автомобили (одобрение типа транспортного средства, ОТТС), обязательно определяют конструктивный тип трансмиссии. Скажем, для версии Nissan Qashqai с вариатором это «гидромеханическая».
Между тем, бывают и коробки передач, сконструированные на базе вариатора, которые нельзя отнести к «гидромеханическим» по той простой причине, что между двигателем и шкивами вариатора нет гидравлического узла, изменяющего момент. А что же там есть? Как правило, это два мокрых многодисковых сцепления, одно из которых отвечает за передний ход, а второе переключает поток мощности на задний. Похожая вариаторная коробка установлена, к примеру, на Lifan X70, у которого в графе «трансмиссия» одобрения типа транспортного средства указано: «механическая».
И вот тут мы подошли к важному моменту: в зависимости от критерия группировки коробок передач, вариаторная коробка без гидротрансформатора может быть одновременно и «механической», и «автоматической». «Механической» она может быть по типу трансформации крутящего момента – в её конструкции отсутствует гидротрансформатор, «автоматической» — по типу управления. А давайте зададимся вопросом: может ли вариаторная коробка быть и «механической», и «ручной»?
Селектор коробки передач автомобиля Jaguar XF Sportbrake 2018Оказывается, может! Водителю для этого понадобится рычаг с приводом, раздвигающим и сдвигающим половинки пары шкивов – ведущего и ведомого, и не более того. Надобности в этом нет никакой, поэтому такого огорода ни один автопроизводитель городить не станет, однако никаких технических препятствий к организации ручного управления вариатором нет.
“Робот” — это “автомат”?
Теперь давайте попробуем самостоятельно определить тип упомянутой коробки концерна Volkswagen, которая для автомобилей марки VW имеет аббревиатуру DSG, то есть, direct shift gearbox. С одной стороны, водитель машины с коробкой DSG не выбирает передачу и не включает её — стало быть, по типу управления, коробка «автоматическая». В конструкции коробки нет гидротрансформатора – на его месте стоят либо два сухих сцепления, либо два пакета фрикционов, работающих в масляной ванне. Стало быть, по типу трансформации крутящего момента DSG – это типичная механическая коробка, что и фиксирует ОТТС на любую из моделей концерна VW с таким агрегатом — скажем, на Skoda Octavia.
С одной стороны, водитель машины с коробкой DSG не выбирает передачу и не включает её — стало быть, по типу управления, коробка «автоматическая». В конструкции коробки нет гидротрансформатора – на его месте стоят либо два сухих сцепления, либо два пакета фрикционов, работающих в масляной ванне. Стало быть, по типу трансформации крутящего момента DSG – это типичная механическая коробка, что и фиксирует ОТТС на любую из моделей концерна VW с таким агрегатом — скажем, на Skoda Octavia.
Уточним, что в потребительской среде российских автовладельцев такие коробки принято называть «роботами». Откуда это пошло? От бездумного перевода западных пресс-релизов и статей. Опять же, если отдельно взятый потребитель представляет себе конструкцию, которую он называет «роботизированной коробкой», то ничего плохого в этом нет, максимум, что может случиться – его не поймут, ведь слово «роботизированный» в применении к трансмиссии не несёт ровным счётом никакого типа конструкции или принципа действия коробки.
Речь может идти как о коробках типа double clutch transmission (то же, что и DSG, только общее название), так и о коробках single clutch transmission, то есть, об агрегатах с одним автоматически срабатывающим сцеплением. Такие коробки были распространены ещё некоторое время назад: например, коробку Easytronic широко применяли в Opel.
Коробка передач Easytronic OpelНаконец, «роботизированными» коробками часто называют и такие, в которых часть функций по включению передачи берёт на себя электроника. Такие агрегаты хотя и не часто, но встречались на рынке. Скажем, коробка Porsche Sportomatic, разработанная ещё в конце 60-х: у машины было две педали – газ и тормоз, при этом сцепление срабатывало автоматически, когда водитель обычным рычагом переключал каретки синхронизаторов из одного положения в другое. Все нагрузки при этом сглаживал гидротрансформатор.
В общем, давайте говорить правильно! А теперь вернёмся к вопросу, с которого мы начали статью: что же отличает автомобиль с ручной коробкой от машины с «автоматом»? Ответ прост: количество педалей. В первом случае их три, во втором – две. Собственно, это и есть главный вывод, который нужно запомнить, остальное – детали…
В первом случае их три, во втором – две. Собственно, это и есть главный вывод, который нужно запомнить, остальное – детали…
Опрос
Теперь, когда вы знаете, как правильно — вы будете иначе называть типы коробок передач?
Всего голосов:
механика, автомат, робот или вариатор
С каждым годом выбирать машину на новом и вторичном рынке становится всё сложнее. Это обусловлено стремительным ростом ассортимента, появлением новых решений, интересных разработок и широкого списка действительно достойных и качественных автомобилей.
Одной из актуальных проблем покупки транспортного средства справедливо считается подбор коробки передач. Ранее особого выбора у потребителей не было, поскольку все моторы работали в паре только с механическими КПП. Затем появились первые автоматы, но устанавливались на дорогие машины. Сами коробки автомат не обладали высоким уровнем надёжности, часто выходили из строя, а их ремонт или замена обходились в целое состояние.
Сами коробки автомат не обладали высоким уровнем надёжности, часто выходили из строя, а их ремонт или замена обходились в целое состояние.
Но нынешняя ситуация современно иная. Качество значительно улучшилось, упрекнуть те же автоматы в плохой надёжности или неэкономичности нельзя. В итоге можно выделить несколько основных видов КПП, между которыми и приходится выбирать покупателям.
Разновидности коробок передач
Сразу важно заметить, что выбирать коробку сугубо по её типу не стоит. Подбор КПП входит в комплекс мероприятий и вопросов, на которые нужно самому себе ответить при покупке автомобиля.
В истории даже ведущих автопроизводителей случались провалы, откровенно неудачные эксперименты и просто плохие разработки в области коробок передач. Подобные истории происходили не просто с малоизвестными брендами или китайскими компаниями. Это реальные ситуации, связанные с Toyota, Volkswagen, Mitsubishi и прочими мировыми лидерами.
Определившись с подходящим вам типом коробки передач, обязательно узнайте максимум информации о КПП, которая устанавливается на покупаемый вами автомобиль. Важно узнать, есть ли у трансмиссии какие-то заводские проблемы, возможные дефекты, слабые места. Каждый покупатель должен учитывать собственное мнение, личные предпочтения и имеющийся опыт. В сочетании с выводами экспертов и сухой статистикой касательно коробок тех или иных автокомпаний вы сумеете сделать действительно правильный выбор и принять окончательное решение.
Важно узнать, есть ли у трансмиссии какие-то заводские проблемы, возможные дефекты, слабые места. Каждый покупатель должен учитывать собственное мнение, личные предпочтения и имеющийся опыт. В сочетании с выводами экспертов и сухой статистикой касательно коробок тех или иных автокомпаний вы сумеете сделать действительно правильный выбор и принять окончательное решение.
При выборе коробок передач покупатели могут столкнуться с некоторыми проблемами и сложностями. Обусловлено это в основном тем, что каждый автопроизводитель стремится выделиться, показать себя с лучшей стороны и заставить обратить на себя внимание. И вместо того, чтобы использовать традиционную систему классификации коробок, они придумывают собственные названия. В итоге разобраться во всём этом разнообразии оказывается не так уж и просто.
Так же компания VAG, в которую входят бренды Volkswagen, Audi, Skoda и другие марки, активно продвигает коробки DSG. В случае с компанией Renault всё чаще можно услышать про EasyR, а у фирмы Ford в приоритете сейчас КПП под названием PowerShift.
Изучая всевозможную литературу и листая журналы, неопытный автолюбитель наталкивается на аббревиатуры типа AMT, AT, CVT и пр. Всё это создаёт настоящую кашу в голове и ещё больше вводит человека в заблуждение.
Не имея определённого багажа знаний, идти в автосалон и полагаться на мнение продавца тоже не стоит. Наверняка вам будут предлагать самые дорогие комплектации либо попытаются продать неликвидные машины, которые никто брать не хочет, поскольку знает, что там стоит плохая коробка или она плохо взаимодействует с установленным мотором.
Если абстрагироваться от всевозможных непонятных для многих аббревиатур, то можно сделать вывод, что основной выбор заключается между 4 разновидностями коробок передач. А именно:
- механика;
- классический автомат;
- вариатор;
- робот.
С механической коробкой всё предельно понятно большинству людей, даже никогда не имевшим дело с управлением машиной. Это КПП, которая существует буквально с самого начала существования машин. Да, за многие годы её усовершенствовали и сделали лучше, но принцип остался тот же. В итоге МКПП считаются самыми надёжными и безотказными, а также, что немаловажно, дешёвыми в обслуживании.
Да, за многие годы её усовершенствовали и сделали лучше, но принцип остался тот же. В итоге МКПП считаются самыми надёжными и безотказными, а также, что немаловажно, дешёвыми в обслуживании.
Такая особенность МКПП и устоявшиеся стереотипы несколько мешают в продвижении и популяризации других трансмиссий. Человек просто привык ездить на механике и не приемлет никаких других коробок, кроме механической. Это достаточно большая ошибка, поскольку в действительности уровень автоматов и его разновидностей, устанавливаемых на современные авто, значительно поднялся. Это надёжные и качественные коробки, существенно облегчающие управление машиной и дающие ряд преимуществ по сравнению с той же механикой.
Поэтому рекомендуем внимательно изучить особенности каждого вида представленных коробок, объективно взглянуть на их сильные и слабые стороны, после чего сделать для себя соответствующие выводы. Это позволит понять, какая трансмиссия будет лучше конкретно в вашей ситуации. Все представленные виды фактически делятся на 2 большие группы. Это механика и автоматические коробки переключения передач, имеющие определённые отличия в реализации и принципе работы. Но по сути все они считаются разновидностью автомата.
Это механика и автоматические коробки переключения передач, имеющие определённые отличия в реализации и принципе работы. Но по сути все они считаются разновидностью автомата.
Классика в лице МКПП
Есть категория автолюбителей, которые даже не хотят спорить относительно того, что лучше, когда им на выбор предлагаются автомат, вариатор, механика и роботизированная коробка передач. В их понимании существует лишь одна трансмиссия, и это только механика.
МКПП в разрезе
В основном такого мнения придерживаются автолюбители старой школы, у которых в своё время просто не было иных вариантов, кроме МКПП. Они учились ездить на механике, первую машину покупали с механической коробкой и до сих пор используют только такой тип КПП. По их утверждению, механика не имеет никаких проблем, она не ломается, является наиболее практичной, универсальной и долговечной.
Но согласиться с таким утверждением сложно. Всё обстоит не совсем так, как рассказывают бывалые автомобилисты. Существует ряд МКПП, где количество проблем и изъянов значительно превышает численность неисправностей в не самых надёжных автоматах. Если и выбирать механику, то строго от проверенного производителя, которая успешно себя зарекомендовала, давно выпускается и имеет множество положительных отзывов. Только так вы сможете гарантированно получить действительно такую МКПП, какой её считают и описывают.
Если и выбирать механику, то строго от проверенного производителя, которая успешно себя зарекомендовала, давно выпускается и имеет множество положительных отзывов. Только так вы сможете гарантированно получить действительно такую МКПП, какой её считают и описывают.
Чтобы определить, какая коробка передач будет лучше, сравнивая такие трансмиссии как механика, автомат, робот и вариатор, стоит взглянуть на их сильные и слабые стороны, что мы и сделаем. Если говорить объективно и учитывать классическую, проверенную временем и длительной эксплуатацией МКПП, то преимущества здесь будут следующие:
- Ремонт механики считается самым дешёвым в сравнении со всеми конкурентами.
- Ресурс МКПП также выше. Поэтому при выборе машины на вторичном рынке, которой исполнилось более 5-7 лет, чтобы не рисковать, предпочтительнее брать авто именно на механике.
- При возникновении неисправностей авто на МКПП всё равно сможет двигаться дальше. Это будет сопровождаться шумом и скрежетом, зато у водителя появится возможность своим ходом добраться до гаража или автосервиса.
 Такой возможности у автомата нет.
Такой возможности у автомата нет. - Если соблюдать правила эксплуатации, расход топлива на механике окажется минимальным. Хотя постепенно некоторые АКПП, и особенно вариаторы, активно приближаются и опережают механику по экономичности. Поэтому это преимущество постепенно перестаёт быть столь очевидным.
- МКПП предусматривает элементарное обслуживание. Никаких сложных манипуляций здесь проделывать не приходится. Основным условием качественной работы является своевременная замена трансмиссионного масла. Проводится она обычно раз в 50-60 тысяч километров.
- Механика обладает максимальным ресурсом. Есть множество примеров автомобилей, которые ездят более 20 лет без замены и серьёзного ремонта МКПП.
Помимо очевидных преимуществ, есть у механики и некоторые недостатки. Основным из них считается сомнительный уровень комфорта. Правая рука водителя всегда сконцентрирована на ручке МКПП, и времени для отдыха практически нет. Особенно сложно и утомительно ездить на механике в условиях плотного трафика, постоянных пробок и многочисленных светофоров.
Это становится настоящей проблемой для новичков. Слишком многом внимания приходится уделять переключению передач и одновременной работе коробки с педалью сцепления и газа. Со временем человек привыкает, но всё же, по сравнению с автоматом, механика очевидно уступает.
Если неправильно работать ручкой МКПП, есть риск сжечь сцепление, сломать трансмиссию и перегрузить двигатель. Автомат в этом компоненте лучше, поскольку он дозирует нагрузку и правильно выбирает передачи. Тем самым мотор чувствует себя намного лучше. Обучившись правильной работе с МКПП, такой минус вы сможете убрать из списка.
Подводя итоги, стоит отметить, что в плане комфорта и удобства вождения МКПП объективно уступает любому виду автомата. Но механика точно доставит меньше проблем, нежели хороший автомат.
АКПП или гидротрансформатор
Это классический вариант автоматической коробки передач. Чаще всего среди автолюбителей возникает именно вопрос касательно того, какая коробка передач будет лучше: автомат или обычная механика. И ответ дать сложно, поскольку не всё так однозначно. Взглянув на сильные и слабые стороны МКПП, нужно также посмотреть на характеристики автомата.
АКПП в разрезе
Классическая АКПП работает на основе гидротрансформатора. Это специальный узел, переключающий планетарные передачи. Что же касается самого гидротрансформатора, то он в структуре АКПП играет роль сцепления, заменяя тем самым необходимость водителя выжимать эту педаль и переключать скорости вручную, как это происходит на механике.
Система достаточно сложная, но зато даёт возможность в автоматическом режиме переключать передачи. Причём электроника делает это в оптимальный момент, учитывая нагрузку и условия движения транспортного средства.
Условным недостатком можно назвать необходимость более частой замены трансмиссионного масла. Но это далеко не самая сложная процедура, которую можно выполнить своими руками. Современные и качественные АКПП доказывают, что могут служить долго и надёжно, порой затмевая даже старые проверенные МКПП по срок службы и ресурсу.![]()
Традиционные АКПП имеют несколько основных преимуществ.
- Срок службы или ресурс. Классический автомат работает уверенно, эффективно и не требует сложного обслуживания или регулярного ремонта. Для современной АКПП пробег в 400-500 тысяч километров не является пределом. Машина может пройти такое расстояние, если обслуживать коробку в соответствии с регламентом и использовать качественные расходники. Основное внимание стоит уделить качеству ATF смазки, то есть маслу для АКПП.
- Уровень комфорта. Переключение скоростей осуществляется не просто практически незаметно, но и без участия водителя. Ему не нужно дёргать постоянно ручку, выжимать сцепление, правильно дозировать газ, чтобы машина вдруг не заглохла при старте или при манёвре. Несмотря на появление новых подкатегорий автоматов, классический гидротрансформатор всё равно находится на высоком уровне в плане комфорта.
- Простота устройства. Да, система сложнее, чем в случае с механикой. Но не настолько, чтобы сделать самостоятельное обслуживание или ремонт невозможным. Многие автомобилисты успешно содержат АКПП собственными силами, существенно экономя при этом деньги.
- Устойчивость к нагрузкам. Это прерогатива более новых АКПП, где предусмотрена возможность автоматического управления очень мощными двигателями. Даже в экстремальных условиях автомат зачастую ведёт себя лучше, нежели механика. Водитель сконцентрирован на дороге и преодолении препятствий, не отвлекаясь на селектор коробки.
- Пригодность к ремонту. АКПП точно подлежат ремонту. У них встречаются типичные неисправности, но все их давно изучили, поэтому дорого ремонт классического гидротрансформатора стоить не будет. Это дороже, чем с механикой, но значительно дешевле в сравнении с другими видами автоматических коробок.
 Многие автомобилисты успешно содержат АКПП собственными силами, существенно экономя при этом деньги.
Многие автомобилисты успешно содержат АКПП собственными силами, существенно экономя при этом деньги.Со временем, учитывая прогресс АКПП и появление новых разновидностей, уже актуально спрашивать о том, что же лучше: автоматическая или роботизированная коробка передач.
Обусловлено это тем, что классический автомат постепенно теряет свою актуальность. Объяснить это можно повышенными экологическими требованиями, необходимостью максимально сокращать расход топлива. Плюс создание АКПП остаётся дорогим, в то время как другие альтернативные технологии активно дешевеют.
Объяснить это можно повышенными экологическими требованиями, необходимостью максимально сокращать расход топлива. Плюс создание АКПП остаётся дорогим, в то время как другие альтернативные технологии активно дешевеют.
Многие автоэксперты уверены, что в скором времени классический автомат прекратит своё существование. А его место займут вариаторные и роботизированные коробки. Так это будет на самом деле или нет, покажет время.
Вариатор или просто CVT
Некоторые автолюбители до сих пор не знают, что такое вариатор и чем он вообще отличается от обычного автомата. Здесь речь идёт о бесступенчатой коробке передач. Её позиционируют как наиболее комфортный вариант АКПП.
Если говорить о конструкции и принципе работы, то тут используется рабочий механизм, в котором располагается приводной ремень и передвигается по двум специальным конусам. Последние разнонаправленные, что позволяет отказаться от поднятия передачи. Их тут попросту нет. В определённые моменты, учитывая нагрузку и прочие факторы, считываемые датчиками и электроникой, автоматика выбирает оптимальную зону для расположения приводного ремня, тем самым эффективно передавая крутящий момент на приводные колёса автомобиля. Это максимально упрощённое описание системы CVT, зато даёт возможность понять суть вариатора.
Последние разнонаправленные, что позволяет отказаться от поднятия передачи. Их тут попросту нет. В определённые моменты, учитывая нагрузку и прочие факторы, считываемые датчиками и электроникой, автоматика выбирает оптимальную зону для расположения приводного ремня, тем самым эффективно передавая крутящий момент на приводные колёса автомобиля. Это максимально упрощённое описание системы CVT, зато даёт возможность понять суть вариатора.
К сильным сторонам вариаторной коробки можно отнести такие пункты:
- Максимально плавная передача крутящего момента от мотора на колёса. Тем самым водитель ощущает высокий уровень комфорта и крайне приятные ощущения без рывков и прочих особенностей работы гидротрансформатора и МКПП.
- Разгон осуществляется очень плавно, отсутствуют рывки и переключения. Машина попросту начинает равномерно набирать ход, причём может делать это быстро и с хорошей динамикой. Это напрямую зависит от самого мотора и того, как водитель будет нажимать на газ.
- Превосходные показатели расхода топлива. В большинстве случаев CVT ставят на автомобили, где важнейшим аспектом при эксплуатации является экономия.
- Простейшая схема работы, доступная для понимания даже новичку. Привыкнуть к управлению вариатором проще всего. Даже при переходе с механики или автомата, адаптироваться к CVT не составит никакого труда. Всё просто и интуитивно понятно.
- CVT активно дешевеет, как и сама система, хотя обходится довольно дорого в плане ремонта. Это позволяет устанавливать вариаторы на бюджетные авто и не сильно завышать начальную стоимость автомобиля с такой коробкой.

Но помимо очевидных преимуществ, коробки CVT обладают некоторыми недостатками.
Начать следует с не самого образцового ресурса. Срок службы нынешних вариаторов уступает автомату и механике. В среднем без проблем вариатор может проработать около 150 тысяч километров.
CVT очень не любят перегрузок и перегревов. В противном случае ремень рвётся, коробка ломается буквально на ходу и ехать дальше вы уже не сможете. Такие КПП не предназначены для спортивной езды, агрессивного вождения, перевозки тяжёлых прицепов или для выезда на бездорожье. Сугубо городской тип трансмиссии, предназначенный для плавной и размеренной езды.
Такие КПП не предназначены для спортивной езды, агрессивного вождения, перевозки тяжёлых прицепов или для выезда на бездорожье. Сугубо городской тип трансмиссии, предназначенный для плавной и размеренной езды.
Покупать подержанную машину, прошедшую более 100-120 тысяч километров, оснащённую вариатором, настоятельно не рекомендуется. Слишком большие риски. Потребуются внушительные финансовые затраты на ремонт, восстановление и замену. Даже если сама машина относится к категории бюджетных авто.
Робот или роботизированная КПП
Также всё чаще люди интересуются, что лучше выбрать: робот или автомат. Роботизированная коробка передач является новым витком в истории развития автомобильных трансмиссий.
Особенность робота или РКПП заключается в том, что в его основе лежит конструкция МКПП, дополненная специальным узлом переключения. Он отвечает за управление сцеплением и выбирает передачи в автоматическом режиме.
Если говорить о том, что же лучше, когда предлагается автомат и роботизированная современная коробка передач, многие эксперты скажут брать РКПП. Это можно объяснить практически безграничными возможностями по их настройке и доработке. Не зря практически все ведущие автокомпании считают своим долгом укомплектовать собственные новые авто роботом. Именно для них активно придумываются индивидуальные, яркие названия. Хотя по факту всё это роботизированные коробки, которые просто имеют несколько иные настройки и параметры, отличающие их от роботов конкурентов.
Это можно объяснить практически безграничными возможностями по их настройке и доработке. Не зря практически все ведущие автокомпании считают своим долгом укомплектовать собственные новые авто роботом. Именно для них активно придумываются индивидуальные, яркие названия. Хотя по факту всё это роботизированные коробки, которые просто имеют несколько иные настройки и параметры, отличающие их от роботов конкурентов.
Устройство РКПП
Что касается преимуществ, то тут специалисты и эксперты акцентируют внимание на следующих моментах:
- Отличные показатели расхода топлива. Современные роботы демонстрируют экономию, превышающую классическую механику примерно на 5-10%. Причём это не маркетинговый ход и не рекламные заявления: результаты, показанные в рамках специальных тестов, доказаны и обычными автовладельцами машин с РКПП.
- Превосходная динамика. В этом компоненте робот превосходит всех своих конкурентов. Роботизированные трансмиссии моментально адаптируются к новым условиям эксплуатации, двигатель сразу откликается на работу педалью газа.
- Бережное отношение к двигателю. Эксплуатируя РКПП, случайно или даже намеренно навредить двигателю будет проблематично. Система очень умная и продуманная, из-за чего мотор удаётся поддерживать в оптимальном состоянии.
- Стоимость конструкции. В настоящее время создать и произвести РКПП становится всё дешевле. Во многом этот технологический процесс требует в 2 раза меньше среди, нежели на создание автомата. При этом само производство проще и быстрее.
- Экологичность. Именно за счёт роботизированных коробок многим автокомпаниям удаётся соблюдать всё более жёсткие экологические нормы.

Всё это хорошо и интересно. Но ровно до того момента, когда речь заходит о надёжности и стоимости обслуживания. В этом плане роботы могут дать большую фору своим конкурентам. Это действительно дорогие коробки, ремонт которых может стоить порой целое состояние. Да и надёжность пока на низком уровне.
РКПП имеет тонкую настройку, над которой работают целые команды программистов. Да, это позволяет менять буквально всё в функционировании трансмиссии. Но если сбить настройки или произойдёт какой-то программный сбой, решить проблему своими силами вряд ли получится. А экспертов по ремонту роботизированных коробок у нас не так много.
Да, это позволяет менять буквально всё в функционировании трансмиссии. Но если сбить настройки или произойдёт какой-то программный сбой, решить проблему своими силами вряд ли получится. А экспертов по ремонту роботизированных коробок у нас не так много.
Что выбрать и почему
Подводя итог, следует ответить на вопрос о том, какую коробку передач лучше выбрать и почему. Это достаточно сложный вопрос, поскольку найти однозначный и объективный ответ на него практически невозможно.
Многие автомобилисты продолжают активно смотреть в сторону АКПП, и тому есть широкий перечень причин. Также никуда не пропала традиционная механика. Постепенно наращивает своё присутствие вариатор. Что же касается роботов, то первые версии этих коробок позиции теряют, но им на смену приходят усовершенствованные решения вроде преселективных КПП.
Объективно даже самые надёжные существующие автоматические коробки передач не могут обеспечить такой же уровень безотказности и долговечности, как механика. При этом МКПП заметно уступает по уровню комфорта, и сталкивает водителя с необходимостью слишком многом времени и внимания уделять сцеплению и селектору трансмиссии.
При этом МКПП заметно уступает по уровню комфорта, и сталкивает водителя с необходимостью слишком многом времени и внимания уделять сцеплению и селектору трансмиссии.
Если постараться взглянуть на ситуацию максимально объективно, отбросив некоторые условности, всё же можно сказать, с какой именно коробкой передач конкретно в наше время лучше и предпочтительнее брать автомобиль. Это будет классический автомат. Такие коробки надёжны, доступны в ремонте и обслуживании, хорошо чувствуют себя в различных условиях эксплуатации.
Что же касается того, на какой коробке передач вам будет комфортнее, лучше и приятнее ездить, то тут на первое место смело можно ставить вариатор. Роботы подойдут владельцам легковых авто, предпочитающим спокойный режим движения по городу и шоссе, и тем, кто стремится максимально экономить топливо. Преселективная коробка оптимальна для активной езды, высокой скорости и скоростных манёвров.
Да, если брать рейтинг по надёжности среди коробок передач, то тут первое место наверняка займёт классическая механика. На вторую строчку уверенно поднимается гидротрансформатор, а дальше уже последние места делят между собой вариаторы и роботы.
На вторую строчку уверенно поднимается гидротрансформатор, а дальше уже последние места делят между собой вариаторы и роботы.
Опираясь на мнение экспертов и их прогнозы, автоматов будет постепенно становиться всё меньше, механика останется, но её популярность резко упадёт. А вот будущее всё же за вариаторами и преселективными коробками. Им ещё предстоит пройти большой путь становления и усовершенствования. Но уже сейчас эти коробки становятся проще, комфортнее и экономичнее, привлекая тем самым большую аудиторию покупателей. Что именно выбрать, решать только вам.
Что делать, чтобы роботизированная коробка передач не ломалась
Что может сломаться в «роботе»
Самый пугающий (но на самом деле самый безобидный) симптом проявляется в следующем: «мозги» коробки в какой-то момент перестают распознавать положение селектора или не разрешают включить Drive или Reverse, а в некоторых случаях — даже завести мотор. В режим самозащиты «робот» может перейти либо при перегреве, либо при сбоях в работе датчиков. Сильный перегрев, кстати, их и «перекашивает», делая проблему регулярной.
Сильный перегрев, кстати, их и «перекашивает», делая проблему регулярной.
«Робот» с одним диском, несмотря на простоту конструкции, не может похвастаться огромным ресурсом. Если сама коробка обычно служит долго, то сцепление изнашивается быстрее, чем у опытного водителя, ездящего на «механике» — порой уже через 20–30 тыс. км. Нередки и отказы его сервопривода, которому требуется немалое усилие для размыкания дисков.
Тонким местом преселективных коробок тоже оказались сцепления. Их износ — самая распространённая неисправность трансмиссий этого типа. Традиционные «сухие» диски сцепления, нормально работающие в паре с МКПП, при быстрых и частых переключениях «робота» склонны к перегреву и, как следствие, быстрому износу и деформации, поэтому их применяют только там, где нагрузки на коробку относительно невелики. С мощными моторами или на тяжёлых машинах приходится использовать многодисковые сцепления, работающие в специальном масле, которое их охлаждает. И всё равно для узла «сухих» сцеплений в преселективной коробке неплохим ресурсом считаются 60–70 тыс. км, «мокрые» могут прослужить вдвое дольше, но их обслуживание и замена обходятся значительно дороже. Верные признаки износа сцеплений — толчки при переключениях, вибрации при старте автомобиля с места.
км, «мокрые» могут прослужить вдвое дольше, но их обслуживание и замена обходятся значительно дороже. Верные признаки износа сцеплений — толчки при переключениях, вибрации при старте автомобиля с места.
Чтобы коробка переключалась плавно, а сцепления служили долго, требуется очень точная и согласованная работа систем управления сцеплениями и сменой передач. Если заведующий этим мехатронный блок настроен недостаточно тонко и неточно исполняет команды электронной программы управления, то коробка начинает методично убивать сама себя.
Именно мехатроника — самая капризная часть «робота». Этот блок, совмещающий в себе электронные и гидравлические части для приводных механизмов, работает в довольно сложных условиях — ему приходится с большой частотой выполнять разные команды, выдерживать большое давление рабочей жидкости (она отличается от масла, залитого в саму коробку), подстраивать свои режимы под текущие условия езды, режимы и фактический износ сцеплений. В общем, сбои, перегревы, отклонения в работе управляющих соленоидов, загрязнение масляных каналов, подтёки и даже трещины в корпусе мехатронного блока — список возможных проблем довольно обширен.
Самые редкие, но тоже больно бьющие по карману неисправности связаны с механической частью коробки. Износ валов, шестерёнок, вилок переключения, подшипников и прочих деталей редуктора (всё это проявляется специфическим шумом или заминками в переключениях передач) лечится, как правило, только капитальным ремонтом «робота». Либо его полной заменой.
Впрочем, не всё так драматично. Инженеры постоянно работают над повышением надёжности «роботов» с двумя сцеплениями. Если правильно эксплуатировать и обслуживать, то сегодня даже «сухая» конструкция способна без каких-либо проблем и дорогостоящих замен пройти 150–200 тысяч пробега.
Какая коробка передач лучше: робот или традиционный «автомат»
Роботизированные коробки передач – удобный и дешевый способ наделить бюджетную модель автоматической трансмиссией. Однако, различия между от классической АКП не только в цене, но и кое в чем другом. Стоит ли «робот» своих преимуществ на фоне тех минусов?
То, что мы называем роботизированной или автоматизированной трансмиссией, на самом деле является обычной механической коробкой с пристроенными к ней электроприводами, которые вместо водителя двигают тяги кулисы и выжимают сцепление. Руководит этими приводами электронный блок, который учитывает несколько факторов, и задача которого – переключить передачу вовремя и как можно быстрее.
Руководит этими приводами электронный блок, который учитывает несколько факторов, и задача которого – переключить передачу вовремя и как можно быстрее.
Роботизированная автоматическая трансмиссия – это обычная “механика”, к которой приладили сервоприводы, движущие рычаги кулисы и сцепление вместо водителя.
Этот тип трансмиссии конструкторы изобрели не так давно, примерно полтора десятка лет назад, но за это время «роботы» успели заметно усовершенствоваться: стали более проворными и надежными. Стоит такая трансмиссия несравнимо дешевле и гидромеханической АКП, и бесступенчатого вариатора. Поэтому и получает распространение, причем не только на бюджетных компактных моделях, а также на кроссоверах.
Читайте также: Коробка передач: робот, автомат или механика – в чем разница
Однако, определенная часть автомобилистов роботизированные коробки откровенно не любит. А есть ли за что?
Динамика. Первая проблема, за которую упрекают работов их критики – это задержки при разгоне. Робот «задумывается» на каждой передаче и при кик-дауне, и при обычном ускорении. Это приходится учитывать при обгонах, а толчки и зависания замечают даже пассажиры. На фоне «работа» классическая АКП кажется просто образцом динамики и комфортабельности – хотя как известно, сама не без греха.
Робот «задумывается» на каждой передаче и при кик-дауне, и при обычном ускорении. Это приходится учитывать при обгонах, а толчки и зависания замечают даже пассажиры. На фоне «работа» классическая АКП кажется просто образцом динамики и комфортабельности – хотя как известно, сама не без греха.
Экономичность. Правильный “робот” может обеспечивать экономичность даже лучше обычной механики. Ведь руководит процессом подбора передач и их переключением компьютер, а усложняющих факторов, повышающих аппетит, в виде гидротрансформатора или гидромуфты, нет.
И роботизированная МКП, и гидромеханическая АКП имеют режим ручного переключения. Это удобно для торможений двигателем и движения на подъем под нагрузкой.
Движение в пробках. Есть определенная разница в поведении двух автоматических трансмиссий в условиях напряженного городского трафика.
Читайте также: Как отремонтировать шину в дороге своими руками
Для робота является нежелательным режим, когда машина подолгу тянется на небольшой скорости. Поскольку фактически это происходит при полунажатом сцеплении, его диски будут ускоренно изнашиваться – так “на работе” лучше не ползти, а стоять на месте до тех пор, пока впереди не освободится отрезок пути, который можно преодолеть быстрой короткой «перебежкой». Классический автомат такие условия не считает проблемой, поскольку у него вместо сцепления – потоки смазки между двумя роторами.
Поскольку фактически это происходит при полунажатом сцеплении, его диски будут ускоренно изнашиваться – так “на работе” лучше не ползти, а стоять на месте до тех пор, пока впереди не освободится отрезок пути, который можно преодолеть быстрой короткой «перебежкой». Классический автомат такие условия не считает проблемой, поскольку у него вместо сцепления – потоки смазки между двумя роторами.
Движение в тяжелых условиях. Поскольку за процесс соединения трансмиссии соответствует обычное двухдисковое сцепление (хотя и с приаттаченным сбоку электроприводом), робот, как и классическая АКП, не боится выезжать на бордюр. Не считает он за особую проблему и движение по плохим грунтовкам, и буксование. Правда, «раскачаться», засев в грязи или снегу, на «работе» будет непросто. Словом, осложненные условия движения роботизированная коробка и АКП переживают примерно одинаково, хотя навыки управления в таких ситуациях нужны разные.
Ремонт АКП с гидротрансформатором (на фото) доступен только профессионалам высокого класса. С заменой навесных блоков «робота» справится простой механик.
С заменой навесных блоков «робота» справится простой механик.
Долговечность. По сравнению с гидромеханической АКП роботизированная коробка устроена проще, поэтому ремонтировать ее значительно дешевле. По поводу ресурсов, то в обоих случаях он во многом зависит от стиля езды, а также от модели и производителя. В целом долговечность примерно одинакова: если в классическом “автомате” чаще всего подгорают фрикционы, то у «роботов» прежде всего отказывает сервопривод переключений, а также – сцепление.
Цена. Роботизированная “механика” значительно дешевле гидромеханической АКП, и это заметно по ценникам в автосалонах, особенно когда речь идет о бюджетных моделях.
Больше информации о недостатках и плюсах разных коробок передач можно найти тут.
Рекомендация Авто24
К сожалению, автопроизводители часто не оставляют нам выбора, и некоторые новые модели предлагаются исключительно или с роботом, или с “механикой”. Если у вас нет особых драйверских амбиций, то можете смело выбирать роботизированную трансмиссию: на большинстве моделей она довольно живучая, надежная и честно делает свое дело. Ну а если вам не нравится мечтательность «робототехники» и сомнительная долговечность вариатора CVT, то советуем искать классический гидромеханический “автомат”. На новых машинах такую коробку можно найти среди моделей, которые выпускаются давно, или в каталогах брендов, так сказать, второго порядка, которые не спешат за технической модой и используют проверенные технологии недалекого прошлого.
Ну а если вам не нравится мечтательность «робототехники» и сомнительная долговечность вариатора CVT, то советуем искать классический гидромеханический “автомат”. На новых машинах такую коробку можно найти среди моделей, которые выпускаются давно, или в каталогах брендов, так сказать, второго порядка, которые не спешат за технической модой и используют проверенные технологии недалекого прошлого.
Читайте также: Готовим автомобиль к езде по ямам: как ездить по плохим дорогам
Секреты коробок: механика, автомат или робот? — Новости Петербурга
Не вмешиваясь в споры между горячими сторонниками той или иной системы, «Общественный контроль» разбирался, какую коробку лучше выбрать и за какой из них — будущее.
Цена, качество и традиция
С точки зрения покупателя, коробка переключения передач, как и любой другой агрегат, должна отвечать классическому соотношению «цена — качество». Причем в понятие «качество» входят не только комфорт и удобство, но и долговечность работы, а также такой параметр, как ремонтопригодность. Увы, подавляющее большинство современных агрегатов рассчитаны на постоянно обновляющийся парк автомобилей.
Увы, подавляющее большинство современных агрегатов рассчитаны на постоянно обновляющийся парк автомобилей.
Автоконцерны сегодня исходят из того, что их машины не будут эксплуатировать десятилетиями, передавая из рук в руки и по наследству (как, впрочем, любую технику — от стиральных машин до микроволновок).
Автоконцерны сегодня исходят из того, что их машины не будут эксплуатировать десятилетиями, передавая из рук в руки и по наследству (как, впрочем, любую технику — от стиральных машин до микроволновок). Поэтому и коробки передач ремонтировать теперь дорого, сложно — да и результат обычно оставляет желать много лучшего. Причем касается это не только сложных автоматов и роботов, но и обычной механики. Времена старого Opel серии F16, у которого заменить коробку передач было едва ли сложнее, чем колеса или свечи, безвозвратно ушли в прошлое.
Все дело в том, что и механическая коробка переключения передач (МКПП) стала сегодня сложнейшим агрегатом, насыщенным высокоточной механикой. И главным ее плюсом является теперь не долговечность, а первоначальная стоимость: автомобили с механической трансмиссией стоят дешевле тех, которые оснащены АКПП и роботом. Секрет кроется в себестоимости производства — она традиционно ниже для производителя, не требует электронной отладки и постоянной работы с программным обеспечением. То есть дешевле она при покупке, но не в процессе эксплуатации или ремонте. Вот, собственно, и все традиции.
И главным ее плюсом является теперь не долговечность, а первоначальная стоимость: автомобили с механической трансмиссией стоят дешевле тех, которые оснащены АКПП и роботом. Секрет кроется в себестоимости производства — она традиционно ниже для производителя, не требует электронной отладки и постоянной работы с программным обеспечением. То есть дешевле она при покупке, но не в процессе эксплуатации или ремонте. Вот, собственно, и все традиции.
Известно, что новичкам многие автоинструкторы советуют «сперва поездить на механике», чтобы «понять принцип переключения скоростей». Однако это совет, скорее, из серии «купить первую машину подержанную — на убой» и «не поворачивать руль на месте». Наоборот, в руках новичка срок жизни МКПП значительно сократится, так что многим лучше сразу начинать с автомата или робота.
А традиция касается, скорее, того водителя, который уже давно (всю жизнь) ездит с МКПП, и такая езда ему нравится. Раз так — зачем менять привычки: современные механические коробки намного удобнее старых, работают мягче и не передают вибрацию на ручку переключения скоростей, как это бывало у коробок с жесткими тягами.
Автомат — что у него внутри?
Несмотря на то что коробка-автомат эксплуатируется уже десятилетиями, успела прочно войти в нашу жизнь и выросло поколение водителей, в принципе не пользовавшихся другими коробками, определенное недоверие к автомату сохранилось до сих пор. Причем даже у тех, кто использует его не первый год: кто его знает, что происходит у него внутри?
Кроме того, распространен страх самопроизвольного переключения автомата на первую скорость при обгоне «по встречке». Особенности национального вождения вкупе с состоянием отечественных дорог (отсутствие широких асфальтированных обочин и т.д.) не оставляет в таких случаях шанса избежать серьезного ДТП. А такое и правда случается: вот недавно Ford Motors отозвал более 202 тысяч автомобилей именно из-за таких неполадок с автоматической коробкой передач.
Основа работы АКПП — это гидравлика, но современный пяти-, шести- и тем более восьми-, девятиступенчатый автомат — это прежде всего электроника.
Увы, автомобиль — это источник повышенной опасности, тут ничего не поделаешь. И выходят из строя далеко не только автоматические коробки. Тут универсального рецепта нет — разве что вовремя проходить плановые ТО и диагностику. Кстати, это касается и АКПП. Своевременная замена масла, причем — использование «родного», рекомендованного производителем, если и не продлит срок службы агрегата до бесконечности, то сделает его эксплуатацию максимально безопасной.
И выходят из строя далеко не только автоматические коробки. Тут универсального рецепта нет — разве что вовремя проходить плановые ТО и диагностику. Кстати, это касается и АКПП. Своевременная замена масла, причем — использование «родного», рекомендованного производителем, если и не продлит срок службы агрегата до бесконечности, то сделает его эксплуатацию максимально безопасной.
Основа работы АКПП — это гидравлика, но современный пяти-, шести- и тем более восьми-, девятиступенчатый автомат — это прежде всего электроника. Компьютер управляет соленоидами, которые из обычных клапанов (как это было на «автоматах» первого поколения) превратились в устройства, постоянно и плавно меняющие сечение гидроканалов (а значит — и давление в них) в зависимости от того, как водитель выжал педаль газа.
Гидротрансформатор является важнейшей частью автомата: фактически это гидравлический редуктор, который снижает обороты и повышает крутящий момент, передавая энергию двигателя через поток жидкости (трансмиссионного масла). Хотя принцип его работы остается неизменным, он также превратился в сложный узел с механическими частями, находящимися под управлением компьютера.
Хотя принцип его работы остается неизменным, он также превратился в сложный узел с механическими частями, находящимися под управлением компьютера.
Во всех рекламных буклетах говорится о том, что АКПП помогает снизить потребление горючего двигателем (в сравнении с «механикой») и понизить уровень вредных выбросов. В целом это действительно так, хотя экономии и повышения экологической составляющей удалось добиться в первую очередь благодаря использованию нового поколения двигателей. Однако экономия и экология во многом зависят и от манеры вождения. Почти тех же показателей может добиться и опытный спокойный водитель, использующий МКПП. И наоборот — новичок или любитель агрессивной езды добьются повышенного расхода топлива. Не говоря уже о режиме движения в городских пробках.
Робот из гаража Николая II
Современную роботизированную коробку передач называют еще преселективной (от preselect — «предварительно выбирать»). Состоит она фактически из двух коробок, причем у каждой — свое сцепление. Одна отвечает за четный ряд передач и задний ход, другая — за нечетный ряд передач. При переключении передач используется принцип наложения: при включенной нечетной передаче следующая четная включена «предварительно».
Одна отвечает за четный ряд передач и задний ход, другая — за нечетный ряд передач. При переключении передач используется принцип наложения: при включенной нечетной передаче следующая четная включена «предварительно».
Сцепления поочередно соединяют двигатель с колесами за предельно короткое время, недоступное МКПП с ручным управлением, — хотя принцип работы у робота такой же. В этом смысле робот — это тоже определенное возвращение к традиции, от автомата — к «механике». Этот эффект усиливает наличие у робота полуавтоматического режима, когда скорости переключаются как бы вручную. То есть, конечно, переключает скорости компьютер, но по непосредственному выбору водителя.
Кегресс в 1909 — 1917 годах жил и работал в России, служил личным шофером Николая II и заведующим технической частью императорского гаража в звании прапорщика.
Да и вообще — впервые принцип работы коробки переключения передач с двумя сцеплениями инженер компании Citroën Адольф Кегресс описал еще в 1930 году. Разве что в ту пору уровень технологий не позволил внедрить его разработки в производство. Любопытно, что Кегресс в 1909 — 1917 годах жил и работал в России, служил личным шофером Николая II и заведующим технической частью императорского гаража в звании прапорщика. Его изобретения тех времен также хорошо известны в мире, а «подвеска Кегресса» устанавливалась, в том числе, на знаменитые бронеавтомобили «Остин — Путиловец».
Разве что в ту пору уровень технологий не позволил внедрить его разработки в производство. Любопытно, что Кегресс в 1909 — 1917 годах жил и работал в России, служил личным шофером Николая II и заведующим технической частью императорского гаража в звании прапорщика. Его изобретения тех времен также хорошо известны в мире, а «подвеска Кегресса» устанавливалась, в том числе, на знаменитые бронеавтомобили «Остин — Путиловец».
У нас сегодня наиболее известна немецкая роботизированная коробка с двумя сцеплениями DSG, которую одним из первых начал устанавливать на свои серийные автомобили автоконцерн Volkswagen. Вернее, наиболее известна первая, не вполне удачная «сухая» семиступенчатая DSG, имеющая большое количество нареканий. Ряд экспертов действительно не рекомендует покупать подержанные «Вагены» с «сухой» семиступенчатой DSG первых годов выпуска (2008 — 2009), позже конструктивные проблемы были в целом решены. Хотя многие ездили и продолжают ездить на таких автомобилях, не испытывая каких-то неудобств.
Кроме того, по-прежнему существуют и «масляные» роботы, к которым никогда не было существенных претензий. Да и роботов помимо DSG существует немало: DCT M Drivelogic (BMW), PDK (Porsche), Powershift (Ford и Volvo), Speedshift DCT (Mercedes-Benz), S-Tronic (Audi), TCT (Alfa Romeo), Twin Clutch SST (Mitsubishi) и другие.
Все три типа коробок переключения передач продолжают развиваться и совершенствоваться, но вряд ли мы увидим на рынке что-то принципиально новое. Вектор развития цивилизации указывает сегодня на электромобили и гибридные машины, которым, как известно, вообще не нужны сложная механика и гидравлика. Электромотор с простейшим управлением может передавать на колеса какой угодно крутящий момент, и, по всей видимости, в ближайшее время он окончательно похоронит все эти сложные и прекрасные агрегаты — плод напряженной работы мировой инженерной мысли на протяжении почти ста лет.
Будет ли «Механик по торговым автоматам» автоматизирован или заменен роботами?
94% Вероятность автоматизации
«Торговый автомат механик» почти наверняка будет заменен роботами.
Эта вакансия оценена № 597 из № 702. Более высокий рейтинг (то есть меньшее число) означает, что вероятность замены должности ниже.
Хотите поделиться? Нажмите, чтобы Facebook, Twitter, LinkedIn или XING.👍
Должностная инструкция
Устанавливать, обслуживать, настраивать или ремонтировать монетные, торговые или развлекательные автоматы, включая видеоигры, музыкальные автоматы, автоматы для игры в пинбол или игровые автоматы.
Сведения о вакансии
- Код SOC (Стандартная профессиональная классификация): 49-9091.00
- Средняя годовая заработная плата в США составляет 34 860,00 долларов США
- Средняя почасовая оплата составляет 16,00 долларов США
- В настоящее время на данной должности работает 33600 человек
☝️ Информация основана на справочной профессии «Обслуживающие и ремонтирующие монеты, торговые автоматы и игровые автоматы».
Также известен как…
Задания на «Торговый автомат»
- Разобрать и собрать станки в соответствии со спецификациями, используя ручной и электроинструмент.
- Вести записи технического обслуживания и ремонта машин.
- См. Руководства и электрические схемы для сбора информации, необходимой для ремонта машин.
- Осмотрите машины и счетчики, чтобы определить причины неисправностей и устранить мелкие проблемы, такие как застрявшие купюры или застрявшие продукты.
- Отрегулируйте манометры и термостаты машины.
- Свяжитесь с другим ремонтным персоналом или примите меры для снятия оборудования в случаях, когда требуется капитальный ремонт.
- Транспортировать машины к месту установки.
- Подготовить смету ремонта.
- Звоните в сервисную службу для обслуживания и ремонта машин.
- Установить машины, выполнить необходимые водные и электрические соединения в соответствии с нормами.
- Вести учет распределенных товаров и собранных денег.
- Очистить и смазать детали машин.
- Собирайте монеты и банкноты из машин, готовьте счета и рассчитывайтесь с концессионерами.
- Отрегулируйте и отремонтируйте монетные, торговые или развлекательные автоматы и счетчики, а также замените неисправные механические и электрические детали, используя ручной инструмент, паяльник и схемы.
- Записывайте информацию о транзакциях в формы или журналы и уведомляйте назначенный персонал о расхождениях.
- Заменить неисправные детали, такие как изношенные магнитные головки считывателей карт банкоматов.
- Испытательные машины для определения надлежащего функционирования.
- Разливочные машины продуктами, ингредиентами, деньгами и другими расходными материалами.
- Заказ запасных частей для ремонта станков.


Сопутствующие технологии и инструменты
- Пилы аккумуляторные
- Круги шлифовальные приводные
- Непроводящие файлы
- Съемники резиновых ламп
- Ключ разводной
- Бритвенные ножи
- Напильники плоские
- Двойные прицелы
- Ключ шестигранный с Т-образной ручкой
- Лупа с подсветкой
- Цифровые осциллографы
- Контактные регуляторы
- Отвертка с плоской головкой
- Цифровые вольтметры
- Коммерческие кофеварки
- Т-образная отвертка для гаек
- Персональные компьютеры
- Магнитная отвертка
- Маленькие зеркальные инструменты
- Инструмент для демонтажа
- Инструмент для зачистки проводов
- Логические анализаторы
- Тестеры конденсаторные
- Рабочие фары
- Датчики высокого напряжения
- Банкомат Банкомат Банковский аппарат
- Логические пробники
- Клещи для снятия швеллеров
- Катушки размагничивания
- Долото холодное плоское
- Игровые автоматы
- Отвертка угловая
- Тестеры электрических цепей
- Молотки кулачковые
- Игровые автоматы
- Отвертки электрические
- Автоматы по продаже закусок
- Калибры пружинные
- Считыватели кредитных карт
- Ключ пуговичный
- Устройства поиска утечек
- Шестигранный ключ
- Монетные автоматы
- Наборы дыроколов
- Инструмент для снятия гаек
- Плоскогубцы
- Ручной обжимной инструмент
- Пинбольные автоматы
- Паяльники
- Набор миниатюрных плоскогубцев
- Аккумуляторные дрели
- Инструмент для резки проволоки
- Отвертка крестовая
- Вакуумметры
- Музыкальные автоматы
- Электропилы
- Национальный комитет по телевизионным системам Генераторы шаблонов NTSC
- Магнитные выдвижные инструменты
- Инструмент вращающийся
- Мультиметры цифровые
- Омметры цифровые
- Сканеры ввода компьютерных данных
- Microsoft Outlook
- Программа электронной почты
- Microsoft Excel
- Microsoft Word
- Программное обеспечение для инвентаризации
- Веб-браузер
- Microsoft PowerPoint
Лучшие автоматические туалетные лотки 2021 года
После 10 недель исследований и обширных домашних тестов с нашими пятью лучшими продуктами мы обнаружили, что Pet Zone — SmartScoop (производство прекращено) является лучшим автоматическим туалетным лотком. Помимо того, что он автоматический, он великолепен в основах: вы можете использовать обычный наполнитель, он имеет знакомую форму открытого туалета и не мешает своей тихой уборке. Наши подопытные кошки, Kit Kat и Jelly Bean, предпочли знакомый открытый дизайн, и мы оценили его низкие эксплуатационные расходы и эффективную очистку. В качестве апгрейда мы предлагаем хорошо зарекомендовавший себя туалетный ящик Litter-Robot III — Open Air с впечатляющим дизайном, но по более высокой цене.
Помимо того, что он автоматический, он великолепен в основах: вы можете использовать обычный наполнитель, он имеет знакомую форму открытого туалета и не мешает своей тихой уборке. Наши подопытные кошки, Kit Kat и Jelly Bean, предпочли знакомый открытый дизайн, и мы оценили его низкие эксплуатационные расходы и эффективную очистку. В качестве апгрейда мы предлагаем хорошо зарекомендовавший себя туалетный ящик Litter-Robot III — Open Air с впечатляющим дизайном, но по более высокой цене.
Содержание
Сравните лучшие туалетные лотки
1.Лучший выбор: SmartScoop (снято с производства)
Это была явная победа. Несмотря на то, что Pet Zone — SmartScoop не обладал яркими характеристиками других моделей, он просто работал хорошо. Может быть трудно определить, какой автоматический ящик для мусора самый лучший, если все они рекламируют специальные функции, такие как лучший механизм очистки или привлекательный дизайн. Однако наиболее важными аспектами были не то, можете ли вы смывать отходы своей кошки через унитаз или счетчик, который отслеживает частоту использования кошачьего туалета, чтобы следить за их здоровьем: простой и тщательный механизм очистки побеждает.
Лучшее в целом: Pet Zone — SmartScoop
Явный победитель, SmartScoop поддерживает чистый туалетный лоток знакомой формы и формы. Этот простой автоматический туалетный лоток легко адаптируется и постоянно очищается. Наши кошки предпочли открытый, знакомый дизайн, и мы оценили его неприхотливость.
См. Цену на Amazon.comThe Pet Zone обеспечивает удобство, простоту использования и простые функциональные особенности. Он может почувствовать, когда кошка входит в туалетный лоток и остается там какое-то время.Он очищается после того, как кошка уходит, предотвращая слишком долгое появление запаха.
Здесь достаточно места даже для двадцатифунтовой Kit Kat, со значительной площадью подстилки и без замкнутого пространства, которое может создать проблемы для более крупных кошек. В нашей комнате это не было навязчивым; он выглядит как обычный туалетный лоток и находится низко к земле. Уровень шума минимальный, с тихим жужжанием во время цикла очистки.
Кроме того, он разработан таким образом, чтобы его было легко использовать как для кошек, так и для людей. Это простой ящик для мусора с открытым верхом. В отличие от некоторых конкурентов, он имеет узнаваемую прямоугольную форму и позволяет использовать обычный наполнитель, к которому ваши кошки привыкли.
Это простой ящик для мусора с открытым верхом. В отличие от некоторых конкурентов, он имеет узнаваемую прямоугольную форму и позволяет использовать обычный наполнитель, к которому ваши кошки привыкли.
Открытый дизайн позволяет легко войти кошке любого размера. В целом Pet Zone обеспечила знакомую обстановку в ванной, поэтому обе наши кошки быстро привыкли к ней. Он довольно быстро сгребал и черпал, так что шум тоже длился недолго. Это было важно, так как кошек никогда не беспокоило и не пугало.
Сгребающий и зачерпывающий дефлектор Pet Zone имеет довольно тщательную очистку. Двойная система использует обычный наполнитель и обеспечивает сгребание кучей подстилки в одну сторону, которая затем собирает их все, чтобы их можно было подметать черпающим движением и складывать в ящик для отходов. Хотя некоторые комки застревали, это происходило нечасто и только с большими блоками мусора. Он поставлялся с инструментом, предназначенным именно для удаления комков, поэтому было безболезненно просто постучать лопаткой, чтобы разблокировать ее.
В Pet Zone нет наворотов. У него есть простой адаптер переменного тока, который вы подключаете к розетке, и переключатель включения / выключения. Его не нужно программировать, так как таймер очистки уже был отлично. У нас никогда не было проблем с контактом кошек с граблями. Необходимо только подключить Pet Zone, никаких дополнительных требований к настройке. Он справился со своей работой хорошо и тщательно и сократил объем ручной очистки.
Основные выводы:
- Pet Zone — Открытый верх и большая прямоугольная форма Smart Scoop позволяют использовать кошку любого размера и быстро адаптироваться к ней
- Он позволяет использовать обычный наполнитель, поэтому он знаком для ваших кошек
- Система очистки Pet Zone обеспечивает тщательную очистку.Отходы сбрасываются в контейнер с хорошим контролем запаха
- Он работал тихо и быстро и не беспокоил кошек
2. Выбор для модернизации: Litter-Robot III
Высокий уровень и высокие технологии — нет слова, которые мы использовали бы для описания типичного туалетного лотка. Однако эти два качества можно найти в нашем апгрейде, Litter-Robot III. От гладкой круглой формы и прочной конструкции до впечатляющего вращающегося купольного просеивателя — это замечательный ящик для мусора.Он даже загорается внутри и излучает синее свечение в темноте.
Однако эти два качества можно найти в нашем апгрейде, Litter-Robot III. От гладкой круглой формы и прочной конструкции до впечатляющего вращающегося купольного просеивателя — это замечательный ящик для мусора.Он даже загорается внутри и излучает синее свечение в темноте.
Запатентованная система вращения и просеивания Litter-Robot была одним из самых тщательных механизмов очистки, которые мы наблюдали. В нем используется обычный подстилка, и он является наиболее эффективным по полной очистке скоплений мусора, поскольку этот метод не оставляет без внимания ни один подстилка (союзник подстилки). Отделенный шар медленно вращается, просеивая комки в ящик для отходов, затем вращается обратно, чтобы уложить подстилку.
Робот-мусорщик включает больше настроек, чем многие другие туалетные лотки, что полезно для владельцев домашних животных, которым нужно больше настроек.Вы можете настроить таймер, чтобы определить, через сколько времени кошка использует туалетный лоток для активации режима уборки. Эта коробка также имеет программируемый спящий режим.
Эта коробка также имеет программируемый спящий режим.
Выбор для обновления: Litter-Robot III
Высоко оцененный Litter-Robot III — Open Air туалетный лоток также является впечатляющим достижением дизайна и механики. Он позволяет использовать обычную подстилку и может похвастаться одним из самых передовых методов очистки с помощью уникальной вращающейся системы просеивания.
См. Цену на Litter-Robot.comУстановка и вывоз мусора были самыми простыми среди конкурентов.Как и в случае с нашим лучшим выбором, для работы его нужно только подключить к розетке. Когда пришло время убрать собранные отходы, вы просто вытащили находящийся под ним лоток для отходов и выбросили его. Кроме того, лоток для мусора большой, что сокращает периодичность поддержания его чистоты до двух недель. Когда он проходил цикл очистки, шум никогда не был проблемой. При этом он был немного медленнее, чем другие протестированные нами модели.
Несколько областей, в которых робот-мусорщик не справился, были его вход и внушительные размеры. Несмотря на то, что дизайн примечателен, почти как у мини-ракетного корабля, он не вписывается в интерьер вашего дома и занимает много места. Вход в туалетный лоток также мешал нашему большому и старшему коту, Кит Кэт, и затруднял его использование.
Несмотря на то, что дизайн примечателен, почти как у мини-ракетного корабля, он не вписывается в интерьер вашего дома и занимает много места. Вход в туалетный лоток также мешал нашему большому и старшему коту, Кит Кэт, и затруднял его использование.
В то время как Кит Кэт так и не привык к более крутому вертикальному входу, Джелли Бин со временем стал менее пугать вход и использовал его довольно часто. Однако она более маленькая и более активная кошка. Так что имейте в виду, что для пожилых кошек это будет менее удобно.Litter-Robot продает отдельный пандус, который вы можете разместить перед входом, чтобы помочь пожилым кошкам.
Наконец, Litter-Robot — это продукт премиум-класса с премиальной ценой — более чем в два раза дороже нашего лучшего выбора. Это не экономичное решение, особенно если вы хотите, чтобы в вашем доме было несколько автоматических туалетных лотков. Нам также нужно будет купить пандус, чтобы сделать вход более доступным, что добавит еще 50 долларов к стоимости. При этом, если вы можете оплатить счет и освободить для него место в доме, Litter-Robot станет исключительным автоматическим туалетным лотком, который оправдывает ожидания.
Ключевые выносы:
- Впечатляющая запатентованная вращающаяся и просеивающая система очистки Litter-Robot проделала самую тщательную работу по очистке подстилки
- Она также позволяет использовать глиняный наполнитель, к которому ваша кошка привыкла.
- Помет- Робот отличается удивительно простой установкой, вывозом мусора и обслуживанием
- Его большой размер может быть слишком внушительным для некоторых домов, а вход в него затруднен для пожилых / менее активных кошек
- Его цена самая высокая среди конкурентов с автоматическими туалетными лотками
Другие финалисты, которых мы тестировали
PetSafe — ScoopFree Ultra Self-Cleaning Litter Box
PetSafe был уникален тем, что в нем использовались специальные хрустальные наполнители. Подстилка не слипается, а впитывает мочу. К сожалению, он не так хорошо скрывает запах фекалий. Более того, биты часто застревали на граблях. Он был одним из самых тихих среди конкурентов, но это потому, что двигатель, который толкал грабли, был не таким мощным.
Подстилка не слипается, а впитывает мочу. К сожалению, он не так хорошо скрывает запах фекалий. Более того, биты часто застревали на граблях. Он был одним из самых тихих среди конкурентов, но это потому, что двигатель, который толкал грабли, был не таким мощным.
Он также поставляется с капюшоном, который может помочь с проблемами запаха, но может сделать отверстие слишком маленьким, чтобы в него могли войти более крупные кошки.
При этом PetSafe был одним из самых простых в уходе боксов. При использовании одноразовых лотков для мусора все, что вам нужно было сделать, — это снять пластиковую крышку, снять картонный лоток для мусора, выбросить его и установить новый. Некоторые полезные функции, которые увеличивают ценность туалетного лотка, — это счетчик здоровья (который отслеживает, сколько раз ваша кошка пользуется лотком) и регулируемый таймер.
LitterMaid
LitterMaid была довольно стандартным самоочищающимся туалетным лотком. Он использует обычный комковый наполнитель и грабли, чтобы выталкивать комки в контейнер для отходов.Угольные фильтры, входящие в комплект каждой емкости для отходов, позволяют контролировать запах. Очистить было так же просто, как выбросить емкость для отходов и заменить ее новой.
Он использует обычный комковый наполнитель и грабли, чтобы выталкивать комки в контейнер для отходов.Угольные фильтры, входящие в комплект каждой емкости для отходов, позволяют контролировать запах. Очистить было так же просто, как выбросить емкость для отходов и заменить ее новой.
Пандус с ковровым покрытием был хорош, так как облегчил кошкам попадание в туалетный лоток, а также помог предотвратить прослеживание мусора за его пределами. Он также имеет дополнительный таймер сна, чтобы отключить его ночью.
Однако большой проблемой было то, что фекалии довольно часто застревали на граблях, хотя в комплект поставки входил совок, который облегчал их удаление. Так как след для граблей находится внутри туалета, иногда мусор (или, что еще хуже, фекалии) попадал на след. Когда это случалось, грабли на бегу очень громко шлифовали, как будто кто-то точил карандаш. Это означает, что требовалось дополнительное обслуживание, что уменьшало удобство использования этого туалетного лотка.
CatGenie
CatGenie был самым уникальным и сложным туалетным лотком. Он использует биоразлагаемые пластиковые гранулы вместо обычного мусора и подключается к вашему унитазу / водопроводу.Система вращает гранулы в лопатку и эмульгирует твердые отходы, добавляя к ним воду. Затем он промывает гранулы водой в своем «SaniSolution» и, наконец, продувает теплый воздух, чтобы нагреть и высушить гранулы. Преимущество подключения к унитазу / водопроводу состоит в том, что не требуется ручного удаления отходов.
Цикл очистки очень громкий. Поскольку во время цикла сушки он дует теплым воздухом, он также нагревает область вокруг себя. 30-минутный цикл очистки довольно длинный и звучит так, как будто открытая посудомоечная машина выполняет цикл мойки.
Кроме того, пластиковые гранулы незнакомы кошке, привыкшей к комкованию наполнителя. Учитывая все эти факторы, наши кошки могли использовать один из самых устрашающих туалетов. Из-за того, как он очищает, мы не смогли добавить комковатый наполнитель, чтобы хотя бы придать ему узнаваемый аромат. Джелли Бин однажды пописал им, и Кит Кэт даже близко не подходила.
Джелли Бин однажды пописал им, и Кит Кэт даже близко не подходила.
Отсутствие привычного дизайна, громкий цикл уборки и посторонний мусор могут стать сдерживающим фактором для облегчения переноса туалетного лотка.Он также занимал значительный объем места, а его необходимое подключение к водопроводу делало неудобную установку и расположение.
Как мы отбирали финалистов для тестирования
Обещание собрать еще на один комок помета заманчиво для любого владельца кошки. Однако эти продукты могут казаться дорогостоящими, поскольку они могут быть в десять раз дороже, чем ручной туалетный лоток, и иметь менее чем звездные отзывы.
Наше исследование привело нас ко многим статьям, в которых автоматические туалетные лотки оценивались только по их рекламируемым характеристикам и отзывам потребителей.К сожалению, мы не встретили статей с реальным домашним тестированием, поэтому мы воспользовались этой возможностью, чтобы сделать собственное открытие.
Мы также прочесали сабреддит / r / Pets, где, похоже, многие владельцы кошек прибегали к своим собственным приемам для ручной очистки туалетных лотков, поскольку автоматические лотки могут быть непростыми. Наконец, мы прочитали сотни обзоров Amazon о различных автоматических туалетных лотках, чтобы помочь нам определить, что пользователи ищут в идеальном автоматическом лотке.
Наконец, мы прочитали сотни обзоров Amazon о различных автоматических туалетных лотках, чтобы помочь нам определить, что пользователи ищут в идеальном автоматическом лотке.
Благодаря нашим часам исследований и личному опыту ухода за двумя кошками, мы отточили наиболее важные особенности хорошего автоматического лотка:
- Стоимость
- Эффективность уборки
- Влияние на использование кошки
- Настройка и программируемые функции
- Экологичность
- Контроль запаха
- Частота обслуживания
Важные особенности, которые следует учитывать
Стоимость: Цена на автоматический туалетный лоток может колебаться от минимум 100 до 450 долларов США.Это не включает стоимость туалета и принадлежностей, которые могут потребоваться для ящика. Кроме того, хорошее эмпирическое правило для количества туалетных принадлежностей в вашем доме — один на кошку плюс еще один.
Эффективность уборки: Вся цель покупки самоочищающегося / автоматического лотка заключается в его названии. Вам нужен продукт, отвечающий его требованиям. Важно учитывать, какой механизм использует туалетный лоток для очистки мусора. Это грабли? Это совок? Просеивает? Мы обнаружили, что просеивание работает намного лучше, чем сгребание, а совки работают где-то посередине.
Вам нужен продукт, отвечающий его требованиям. Важно учитывать, какой механизм использует туалетный лоток для очистки мусора. Это грабли? Это совок? Просеивает? Мы обнаружили, что просеивание работает намного лучше, чем сгребание, а совки работают где-то посередине.
Влияние на привычку кошки: Переход любой кошки к изменению может быть трудным делом. Вы должны быть осторожны и не нарушать среду обитания кошки, независимо от того, насколько это удобно для вашего образа жизни. Если дизайн сильно отличается от того, к чему привыкла ваша кошка, подумайте о том, чтобы оставить их обычный туалетный лоток под рукой, чтобы облегчить переход (и вашу возможность вернуть новый ящик производителю, если кошка не будет его трогать).
Настройка и программируемые функции: Никто не любит читать длинные страницы руководств по настройке нового продукта.Также важно отметить, какие функции доступны в вашем туалетном лотке. Можно ли запрограммировать чистку в определенное время? Есть ли индикатор, сколько раз ваша кошка использовала его?
Экологичность: Ванная комната вашей кошки не должна быть заметным элементом вашего дома. Он должен сосуществовать с вашим жилым пространством и не быть настолько громким, чтобы часто вас раздражать.
Он должен сосуществовать с вашим жилым пространством и не быть настолько громким, чтобы часто вас раздражать.
Частота обслуживания и контроль запаха: Опять же, автоматические туалетные лотки должны превратить обслуживание туалетного лотка из ежедневного процесса в еженедельный, поддерживая достаточную чистоту пространства для туалетного лотка вашей кошки между сеансами обслуживания и контролируя запах, исходящий от грязного ящик для мусора.
Как мы тестировали
Когда вы пытаетесь выбрать правильный продукт, поиск в Интернете может привести вас к кроличьей норе отзывов и вызвать сомнения относительно того, тратите ли вы так много на дизайн, в котором вы не уверены. обзоры мы нашли только урны для мусора, сравнив характеристики, мы сделали за вас настоящую грязную работу.
Комфорт для ваших кошек и для вас
Если вы когда-нибудь включали принтер рядом с кошкой, вы не понаслышке знаете, как кошка может быть заинтригована и удивлена движением неодушевленного предмета. А теперь представьте, что они чувствуют, когда их лоток оживает.
Это был тщательный и просчитанный процесс перехода Kit Kat и Jelly Bean для проверки эффективности этих туалетных принадлежностей. Поскольку кошки имеют привычки, рекомендуется держать их существующие туалетные лотки рядом или рядом с их новыми, чтобы облегчить переход. Это небольшая проблема для CatGenie, которую нужно было разместить рядом с туалетом. Затем постепенно откажитесь от старых кошачьих туалетов, как только они привыкнут к новому.
Помня об этом и подготовив пять самоочищающихся туалетных лотков, мы установили их новые автоматические туалетные лотки в их существующей ванной комнате. Мы также держали поблизости их старый туалетный лоток. В ящиках для туалета, в которых использовался обычный наполнитель, мы использовали наш проверенный временем Fresh Step — Ultra Unscented. В туалетных лотках, для которых требовался специальный наполнитель, мы использовали продукцию соответствующих брендов.
Мы наблюдали, как они реагируют на работу очистных механизмов и отпугивает ли это их от использования некоторых ящиков.Мы также отметили, насколько легко (или сложно) кошкам входить и выходить из боксов.
Конечно, несмотря на то, что мы планировали и соблюдаем правила перехода к туалетным лоткам, кошки — не роботы: у нас было две аварии. Мы знаем, что это было нелегко для них, поэтому мы добавили рядом дополнительный ручной туалетный ящик , чтобы помочь им перейти. В целом, при изменении чего-либо в окружении вашего питомца важно быть внимательным и реагировать, когда вы видите, что ему нужна помощь.
Наличие туалетной комнаты было еще одним важным аспектом комфорта human , который мы рассмотрели. Наши кошки довольно часто пользуются туалетным лотком, поэтому было необходимо, чтобы автоматический туалетный лоток работал не шумно, так как он будет часто работать. Мы также отметили, как каждый туалетный лоток выглядел в нашем жилом пространстве.
Автоматический механизм очистки
Мы никогда не знали, что можно так много узнать о туалетных лотках. Однако после тестирования пяти ящиков для мусора с определенными механизмами очистки мы обнаружили плюсы и минусы каждого метода:
Однако после тестирования пяти ящиков для мусора с определенными механизмами очистки мы обнаружили плюсы и минусы каждого метода:
- Совки хорошо справлялись с очисткой мусора, но иногда оставляли крошки вокруг лотка.
- Грабли не оставляли беспорядка, но иногда были громкими и часто оставляли отходы на зубах, что требовало дополнительного ухода.
- Туалетная система очищалась очень тщательно, но была горячей и шумной.
- Просеивающая система также очищалась хорошо, но вращающийся купол мог отпугнуть кошек.
Мы оценили эффективность каждого механизма очистки, сравнивая с нашим обычным методом ручной очистки лопаткой вручную.
Было важно, чтобы автоматические ящики для туалета просеивали подстилку, полностью удаляли отходы и сбрасывали подстилку так, чтобы она была выровнена.Мы также наблюдали, как каждый механизм утилизирует отходы и контролирует ли запах. Контроль запаха действительно зависел от того, насколько хорошо тип наполнителя улавливал запах и как каждая емкость удерживала запахи.
Настройка и дополнительные функции
Мы определили, была ли установка легкой или сложной, рассчитав, сколько времени потребовалось для установки каждого лотка. требуются ли для этого дополнительные инструменты и требуется ли для этого конкретное место. Руководства, которые были простыми и легкими в использовании, также помогли сократить время настройки.
Установка также показала, есть ли дополнительные вещи для программирования и что делают кнопки на ящике для мусора. Для нас было важно, что туалетный лоток мог улавливать присутствие кошки, и все они это могли. Все ящики для туалетов снабжены защитой, предотвращающей запуск туалета, если в ящике обнаружена кошка. Дополнительные функции были бонусом и необязательны для эффективности очистки и удобства использования.
Техническое обслуживание и стоимость владения
Мы отметили, как часто нам приходилось проверять туалетный лоток на предмет каких-либо засоров или комков, которые застряли. Механизм очистки должен был работать эффективно, так как это влияло на уход за туалетным лотком. Мы также наблюдали размер контейнера для мусора и то, как часто нам приходилось его заменять или чистить.
Механизм очистки должен был работать эффективно, так как это влияло на уход за туалетным лотком. Мы также наблюдали размер контейнера для мусора и то, как часто нам приходилось его заменять или чистить.
Для некоторых туалетных лотков требовались дополнительные аксессуары или туалетные принадлежности специальной марки, что добавляло дополнительные расходы на использование лотка. Также имело значение, сколько стоит сам туалетный лоток, так как они сильно различаются по цене. Поэтому, если учесть, что вам нужно несколько автоматических туалетных лотков, их количество может накапливаться еще быстрее.
Кому нужен автоматический туалетный лоток?
Более трех миллионов результатов поиска Google по запросу «как часто мне нужно чистить наполнитель для кошачьего туалета?» вы можете легко предположить, что это неприятная работа, которую часто откладывают. Хотя может показаться, что вам нужно его почистить, для вашей кошки никогда не стоит иметь грязный, полный туалетный лоток. Это может привести к ряду проблем, начиная от негативных ассоциаций с туалетным лотком (вызывая несчастные случаи в доме) до более серьезных проблем со здоровьем, таких как заболевания мочевыводящих путей.Автоматический туалетный лоток может легко помочь поддерживать чистоту и доступность ванной комнаты для вашей кошки, позаботившись о процессе уборки и удалении мусора из подстилки для вас.
Это может привести к ряду проблем, начиная от негативных ассоциаций с туалетным лотком (вызывая несчастные случаи в доме) до более серьезных проблем со здоровьем, таких как заболевания мочевыводящих путей.Автоматический туалетный лоток может легко помочь поддерживать чистоту и доступность ванной комнаты для вашей кошки, позаботившись о процессе уборки и удалении мусора из подстилки для вас.
Польза для здоровья вашей кошки в основном зависит от чистого туалета, так что давайте посмотрим правде в глаза, это примерно столько же, сколько вам нужно . Самоочищающийся туалетный лоток ценен для любого владельца кошки, желающего сделать свою повседневную жизнь удобнее, если только у вас нет одного из тех волшебных кошачьих, которые будут участвовать в приучении к туалету.Автоматический ящик может иметь еще большее значение, если у вас несколько кошек. Если вы устали ежедневно выкапывать туалетный лоток для своей кошки, то, вероятно, вы уже не раз задумывались об автоматическом лотке.
Итог
Иногда простое лучше. The Pet Zone — SmartScoop сделал именно то, что должен был делать. Он очистился незаметно для вас. Плюс к этому по разумной цене. Если вы хотите выбрать сверхпремиальный вариант, робот-мусорка — это то, что вам нужно, если вы можете заставить свою кошку использовать его.Но если вам нужно что-то, что просто работает, особенно то, что вам может понадобиться несколько, SmartScoop берет пирог.
Второе место: Litter-Robot III
Если вам нужен автоматический туалетный лоток премиум-класса с рядом функций, которые делают поддержание чистоты подстилки еще более легким, Litter-Robot III — Open Air — надежная ставка. Это дороже, чем наш лучший выбор, но с этим обновлением вы получите то, за что платите.
См. Цену на Litter-RobotПоделиться этим обзором
Брайан — наш эксперт по кулинарии и кухне с более чем 15-летним опытом приготовления и тестирования кухонных продуктов.Вне кухни он любит работать с деревом, фотографировать, снимать видео и выяснять, как вести более экологичный образ жизни. Ему очень нравится открывать лучшее, будь то ингредиенты или оборудование, а также находить продукты, которые выдерживают суровые ежедневные нагрузки.
Ему очень нравится открывать лучшее, будь то ингредиенты или оборудование, а также находить продукты, которые выдерживают суровые ежедневные нагрузки.
Litter Robot 3 Connect Open Air Review
The Litter Robot выдвигает простое предложение: механизированный туалетный ящик за 500 долларов превратит рутинную работу по постоянному черпанию в легкую задачу, не более утомительную, чем вытаскивание мешка для мусора.Под поверхностью таится еще одно обещание: владение высококлассным туалетным контейнером заставит исчезнуть самые грязные части владения кошкой — черпание какашек и отслеживание подстилки.
Вы можете увидеть сообщения об образе жизни в тщательно подобранных социальных сетях, где сияющий земной шар гордо восседает среди растений и бетонных полов гостиной мечты дизайнерского блога, а не скрыт от стыда в ванной. Это каспер кошачьих фекалий, имидж-краппер для кошек.
Этот контент импортирован из Instagram. Вы можете найти то же содержимое в другом формате или найти дополнительную информацию на их веб-сайте.
Робот-мусорщик — экстра . Но для моей семьи это также был потенциальный недостающий элемент. У нас есть автоматическая кормушка для домашних животных, чтобы раздавать еду для наших двух питомцев, пока нас нет. У нас есть веб-камеры, чтобы наблюдать за кошками издалека и уверять себя, что они могут дремать и драться без нас. Тем не менее, путешествие даже на несколько дней означало вернуться домой к вонючему туалетному лотку.Конечно же, решение проблемы — это самовращающийся самоочищающийся кошачий туалет будущего.
Это процесс
Нам нужно начать с самого потенциально важного свойства Litter Robot 3 Connect (помимо его цены): размера. Никакая публикация в Instagram не может передать, никакая спецификация не может сообщить, сколько недвижимости занимает робот. Его след не позволял пронести устройство в нашу ванную комнату. Его объем нарушал духовную гармонию нашей нью-йоркской квартиры с одной спальней.
Робот-мусорщик
Это было особенно неприятно в первые дни и недели переходного периода, когда ни один из наших любимых представителей семейства кошачьих, Белый Клык и Дориан Грей, не приближался к колоссу. Грей, девушка, сделала несколько отстраненных подходов перед тем, как повернуть к своей традиционной деловой зоне. Уайт, считающий себя Храбрым мальчиком, с трудом мог заставить себя прикоснуться к космическому захватчику.
Грей, девушка, сделала несколько отстраненных подходов перед тем, как повернуть к своей традиционной деловой зоне. Уайт, считающий себя Храбрым мальчиком, с трудом мог заставить себя прикоснуться к космическому захватчику.
Джанет Фанг
Поскольку кошкам не может быть гарантировано что-то понравиться или что-то использовать, и поскольку съесть 500 долларов на забракованном волшебном лотке — это не то же самое, что отказаться от 20 долларов на игрушке Галактики Джексона, которую они не трогают, робот-мусорщик имеет приличный Гарантия возврата денег: 90 дней плюс 18-месячная полная гарантия.В нем также есть ряд инструкций о том, как заставить ваших котят использовать новую коробку. Один из них: поместите коробку, в которой он попал, на робота и прорежьте отверстие у двери, чтобы кошки, любопытные по своей природе, рискнули проникнуть внутрь и исследовать. Это не сработало.
На это потребовались недели. Обе кошки крадутся мимо робота, насмехаясь над нами или над ним, по пути к проверенному туалету. Потом: какашки появились. Один, а затем возможный последователь, наблюдение, которое заставило нас броситься в спальню, чтобы шпионить за кошками и ловить их, входящих в мусорный робот.Грей был прорывом. Ее брат преодолел свой трепет кошачьими шагами, когда она продемонстрировала, что это безопасно.
Как это работает
Перейдем к механике. Проще говоря, робот-мусорщик — это сфера на ящике. Коробка содержит отделение для кошачьих отходов, в которое помещается пластиковый пакет. Сфера — это то, во что на самом деле входит ваша кошка. Внутри его дно покрыто резиной, на которой нанесена линия для идеального количества кошачьего туалета.
Когда кошка входит в земной шар, сенсоры робота фиксируют присутствие вашего питомца.Машина не двигается и не поворачивается, пока внутри находится домашнее животное (теоретически). Как только ваша кошка входит, панель управления робота меняет синий режим ожидания на красный, указывая на то, что он почувствовал присутствие кошки. Как только ваш питомец уходит, робот-мусорщик запускает семиминутный обратный отсчет (его можно изменить на другую продолжительность), чтобы дать котенку достаточно времени, чтобы уйти, прежде чем начнется цикл очистки.
Как только ваш питомец уходит, робот-мусорщик запускает семиминутный обратный отсчет (его можно изменить на другую продолжительность), чтобы дать котенку достаточно времени, чтобы уйти, прежде чем начнется цикл очистки.
Именно здесь, когда робот-мусорщик начинает ныть и вращаться, он раскрывает свои механические секреты. Есть пластиковая сетка, через которую будет проходить наполнитель для кошачьего туалета, а через кошачий мусор — нет, именно так машина разделяет их и убирает оставшийся наполнитель.По мере того, как глобус продолжает вращаться, на дне открывается небольшое квадратное отверстие. Кошачьи отходы, теперь отделенные от подстилки, падают через отверстие в сборный контейнер. Достигнув вершины, глобус поворачивается назад, откуда он появился, и машина втягивает ворота, позволяя мусору уйти, чтобы он мог усесться на плоскую кровать, готовую к следующему визиту вашей кошки.
Осторожнее, Белый Клык.
Вот что произошло: наш кот Уайт понял, что это действительно очень забавная игра — стучать по какашкам и камешкам, когда они падают на сферу, и научился связывать жужжание цикла уборки с этим забавным занятием. Теперь всякий раз, когда робот-мусорщик активируется, он прыгает через комнату, чтобы посмотреть и бить по содержимому, пытаясь вытащить его в квартиру, прежде чем оно упадет в ящик для сбора. Ваши результаты могут отличаться.
Теперь всякий раз, когда робот-мусорщик активируется, он прыгает через комнату, чтобы посмотреть и бить по содержимому, пытаясь вытащить его в квартиру, прежде чем оно упадет в ящик для сбора. Ваши результаты могут отличаться.
Проделки нашего мальчика-кота также выявили не совсем идеальную природу датчиков робота-мусорщика: он не всегда регистрирует его присутствие и, следовательно, не всегда активирует цикл очистки после его посещения. С другой стороны, аппарат имеет восьмичасовой спящий режим, который можно запрограммировать в соответствии с вашим собственным графиком сна.Это приостанавливает работу устройства, чтобы оно не жужжало, не жужжало и не будило вас, когда ваши драгоценные питомцы подходят к туалету в 4 часа утра
Робот-мусорщик управляет этими и другими функциями с простой и элегантной панели управления, состоящей всего из четырех кнопок и трех. светятся индикаторы — но не забудьте сохранить краткое руководство, чтобы вы могли расшифровать то, что машина пытается вам сказать. Самая высококлассная версия, Litter Robot Connect III, оснащена рядом интеллектуальных функций, соответствующих ее статусу.Приложение для подключенного телефона отслеживает заполнение контейнера и напоминает, когда пора опорожнять корзину.
Он также может передавать push-уведомления, когда бот завершает цикл очистки. Быстрое получение двух или трех подряд — мой полуденный сигнал о том, что кошки весело бегают в машину и выходят из нее, пока я на работе.
Это того стоит?Есть более удовлетворительные способы подытожить продукт, чем выражение «оно того стоит, если у вас есть деньги, чтобы сжечь».«Тем не менее, мы здесь.
Я не могу сказать, что рекомендовал бы Робота-мусорщика. Это может сделать вашу гостиную немного более привлекательной для Instagram, особенно если вы выберете элегантную серую версию. Из-за привычки пинать мусор вашего особого животного из семейства кошачьих, у вас может получиться гостиная, полная маленьких камешков.
Эндрю Мозман
Автоматический ящик для мусора действительно может быть находкой для тех солдат-скуперов.Несколько дней назад я мельком мельком увидел старый тупой туалетный лоток, который все еще висит в ванной на тот случай, если кошки начнут восстать против машины, и я вспомнил постоянную рутинную работу по уходу за ней. задача теперь исчезла из моей жизни. Но, честно говоря, если вы хотите остановить совок, существуют более экономичные варианты. Они просто не такие имиджевые или огромные.
Даже в этом случае: Нам это нравится. Да, мой кот сводит меня с ума своими махинациями по пописке.И да, мы думаем, что теперь нам нужно больше места для хранения, когда в нашей спальне обитает пластиковый идол какашек. Но нет ничего лучше, чем уехать на несколько дней и знать, что кошки не пойдут в ванную в коробке, которую не уберут до нашего возвращения. И, честно говоря, я все больше привязываюсь к push-уведомлениям. С таким же успехом они могут сказать: «Ваши кошки, наверное, сейчас придурки, но вы их любите».
С таким же успехом они могут сказать: «Ваши кошки, наверное, сейчас придурки, но вы их любите».
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти дополнительную информацию об этом и подобном контенте на сайте piano.io.
Даже с роботами производителям нужен человеческий контакт: NPR
Роботизированная рука работает на производственной линии на заводе Volvo в Риджвилле, Южная Каролина.Но другие важные работы, включая основные этапы окончательной сборки, по-прежнему выполняются людьми. Камила Домоноске / NPR скрыть подпись
переключить подпись Камила Домоноске / NPR Роботизированная рука работает на производственной линии на заводе Volvo в Риджвилле, С. C. Но другие важные работы, включая основные этапы окончательной сборки, по-прежнему выполняются людьми.
C. Но другие важные работы, включая основные этапы окончательной сборки, по-прежнему выполняются людьми.
Роботы произвели революцию в автомобилестроении, сделав заводы более безопасными, а продукты — более надежными — и сократив количество людей, вовлеченных в процесс. Но войдите в современный автомобильный завод, и вы быстро поймете, что роботы едва ли заменили человеческое прикосновение — по крайней мере, в некоторых областях.
Автомобильный завод Volvo в Риджвилле, Южная Каролина, открывшийся в прошлом году, дает наглядный урок. Предприятие производит роскошный седан S60 для рынка США, а также на экспорт.
Начало производственной линии высоко автоматизировано; в первом из трех больших зданий численность роботов превышает численность людей от 300 до 200. Но в конце процесса преобладают люди.
Начнем с роботов. За ограждением безопасности полдюжины роботов-манипуляторов движутся согласованно, сваривая вместе кузов автомобиля, тихо жужжая. Свет в этой части массивного здания приглушен, потому что роботам не требуется много света для выполнения своей работы.
За ограждением безопасности полдюжины роботов-манипуляторов движутся согласованно, сваривая вместе кузов автомобиля, тихо жужжая. Свет в этой части массивного здания приглушен, потому что роботам не требуется много света для выполнения своей работы.
Роботы неоспоримо лучше, чем у людей в некоторых задачах. Они точны и последовательны, и они превосходно повторяют одно и то же движение снова и снова.
Джефф Мур, вице-президент Volvo по производству в Северной и Южной Америке, говорит, что при принятии решения о том, какие задания назначить роботу, компания начинает с , сосредотачиваясь на монотонной, физически сложной работе — особенно на всем, что связано с проблемами безопасности.
«Со всем жаром, искрами, большим током и прочими вещами, связанными со сваркой, это естественное место, где можно более тщательно автоматизировать», — говорит он.
Но в других частях линии «человеческое прикосновение имеет много преимуществ», — говорит Мур.
Или, как сказал в прошлом году генеральный директор Tesla Илон Маск, «людей недооценивают».
Он признал, что Tesla просчиталась, обратившись к тяжелой автоматизации в своем Фремонте, штат Калифорния., конвейер. После того, как возникли проблемы с производством, производитель электромобилей изменил курс и начал возвращать задачи людям.
Так где именно люди до сих пор побеждают роботов? Следуйте за кузовом автомобиля по сборочной линии Volvo, и в конечном итоге огни станут яркими, когда люди прикрепят капот, багажник, крылья и бамперы.
Рабочие осматривают кузов седана Volvo S60 20 июня 2018 года. Роботизированные датчики исследуют сварные швы, а человеческие руки и глаза оценивают прикосновение и ощущение металла. Логан Сайрус / Блумберг через Getty Images скрыть подпись
переключить подпись Логан Сайрус / Блумберг через Getty Images Рабочие осматривают кузов седана Volvo S60 20 июня 2018 года. Роботизированные датчики исследуют сварные швы, а человеческие руки и глаза оценивают прикосновение к металлу.
Роботизированные датчики исследуют сварные швы, а человеческие руки и глаза оценивают прикосновение к металлу.
Затем идет контроль качества. Роботы с датчиками проверяют точечные сварные швы, а люди водят руками по поверхности металлического корпуса, выискивая недостатки. Буквальное человеческое прикосновение здесь по-прежнему невозможно.
Кузов машины проезжает по небесному мосту в другое здание, где его красят — еще одна задача, в которой роботы преуспевают. Затем он отправляется в третье здание для окончательной сборки, где тысячи деталей со всего мира собираются вместе, чтобы сформировать законченный автомобиль.Здесь снова правят люди.
Люди лучше роботов манипулируют сложными формами и соединяют их воедино — это как раз те навыки, которые необходимы, например, для прикрепления деталей к двигателям.
Эти рабочие также работают с различными типами двигателей — газовыми или гибридными, полноприводными или переднеприводными, с турбонаддувом или без него, а в будущем даже с полностью электрическими двигателями. Люди могут легко переключаться между разными задачами и даже на лету брать новые; роботов не так уж и много.
Люди могут легко переключаться между разными задачами и даже на лету брать новые; роботов не так уж и много.
По мере того, как Тремейн Смоллс прикрепляет приводные валы к двигателям, а радиорепортер иногда мешает ему, он не обращает внимания на сложности работы с двигателями разных типов.
«Это один и тот же процесс, только разные приводные валы», — говорит он, показывая, как он сверяет номера деталей на листе бумаги, чтобы убедиться, что каждый двигатель настроен правильно.
Завод Volvo полагается на людей, которые прикрепляют приводные валы и другие детали к конечной производственной линии.Рабочие сверяют номера деталей с бумажными распечатками, прикрепленными к каждому двигателю. Гэри Коулман / Предоставлено Volvo Cars America скрыть подпись
переключить подпись Гэри Коулман / Предоставлено Volvo Cars America Завод Volvo полагается на людей, которые прикрепляют приводные валы и другие детали к конечной производственной линии. Рабочие сверяют номера деталей с бумажными распечатками, прикрепленными к каждому двигателю.
Рабочие сверяют номера деталей с бумажными распечатками, прикрепленными к каждому двигателю.
Джейсон Додгинс, работавший на той же линии, раньше был руководителем группы производителя подшипников. Там, по его словам, его работа заключалась в запуске машины с компьютерным управлением.
«Машина выполняла большую часть основной работы», — говорит он. «Вы в основном проводили инспекцию». Напротив, работа на этой сборочной линии для автомобилей «требует гораздо большего количества ручного труда», — говорит он.
Когда двигатель движется по линии, люди и машины делят работу. Кайла Джеймс, проработавшая всего две недели на эту работу, использует механический подъемник для установки выхлопной системы; он снимает физическое напряжение задачи. Позже большая машина устанавливает одновременно десятки болтов — но между каждым какофоническим залпом Брэндон Маршалл вставляет различные болты на место.
Люди вытесняют роботов в этих задачах, даже когда все идет гладко, но у них есть особое преимущество, когда что-то идет не так.
На современных автозаводах, вдохновленных революционной производственной философией Toyota, рабочих поощряют останавливать конвейер всякий раз, когда возникает какая-либо проблема, большая или маленькая. (На таких заводах, как этот завод Volvo, рабочие тянут шнур и играет музыка — разные песни для каждого местоположения сигнализируют о возникновении проблемы.)
Роботы тоже могут определять определенные ошибки, возникающие в процессе работы, но у людей есть явное преимущество, когда дело доходит до , решающего этих проблем.
Рассмотрим радиаторы Volvo. В одном из ключевых моментов линии кузов автомобиля, ожидающий на приподнятом конвейере, опускается на двигатель, трансмиссию, оси и все остальное, что заставляет автомобиль двигаться. Они собираются вместе в «точке брака».
«Если этот радиатор не отодвинуть достаточно далеко, он разобьется вместе с корпусом», — говорит Трей Йонсе, который помог установить линию точки брака.
Первоначальный производственный процесс предусматривал использование резиновых лент, чтобы удерживать радиатор на месте в этот ключевой момент, но лазерный датчик часто обнаруживал, что радиатор был не совсем в нужном месте. Машины могут пометить проблему, которую нужно исправить.
Но людей, в отличие от роботов, раздражают повторяющиеся проблемы.
«Им просто надоело это делать, один парень придумал идею, и она сработала», — говорит Йонсе. Он указывает на маленький желтый кусок пластика, который более эффективно удерживает радиатор на месте — улучшение процесса.
Мур, вице-президент Volvo, говорит, что компания уже подала заявку на получение нескольких патентов на основе идей, исходящих от рабочих этого нового завода.
Люди имеют сильные стороны по сравнению с роботами на самых разных рабочих местах — не только на автомобильных заводах.
И вообще, люди и роботы лучше всего работают вместе, когда роботы выполняют опасные, монотонные работы и точную работу, в то время как люди выполняют тактильную работу, переключаются между задачами, принимают решения — и придумывают творческие идеи для улучшения вещей.
В каком-то смысле здесь есть урок философии.
«Люди часто думают, что рабочие на производстве — плохая замена роботу», — говорит Сьюзан Хелпер, экономист из Университета Кейс Вестерн Резерв. Как машина, которая жалуется, устает и ошибается.
Исторически сложилось так, что некоторые фабрики пытались относиться к своим рабочим как к роботам, отделяя «умственную» работу от «ручной» и подталкивая рабочих сборочного конвейера выполнять повторяющиеся задачи, не задумываясь.В этой настройке робот — это апгрейд человека-рабочего: он не будет жаловаться и уставать.
«Но на практике это действительно сложно, и рабочий конвейера часто выносит суждения», — говорит Хелпер. «И оказывается, что когда вы забираете этого человека, у вас возникают проблемы, которые трудно решить».
Это означает, что лучшее, что могут сделать роботы для производства, — это не заменить людей, а освободить их, чтобы они могли работать как люди.
Exclusive: Amazon выпускает машины для упаковки заказов и замены рабочих мест
SAN FRANCISCO (Reuters) — Amazon.com Inc развертывает машины для автоматизации работы, выполняемой тысячами ее сотрудников: упаковки заказов клиентов.
В последние годы компания начала добавлять технологию на несколько складов, которая сканирует товары, спускающиеся по конвейерной ленте, и через несколько секунд упаковывает их в коробки, специально созданные для каждого товара, сообщили Reuters два человека, работавшие над проектом.
По словам этих людей, Amazon рассматривает возможность установки двух машин на десятках других складов, удалив не менее 24 ролей на каждом из них.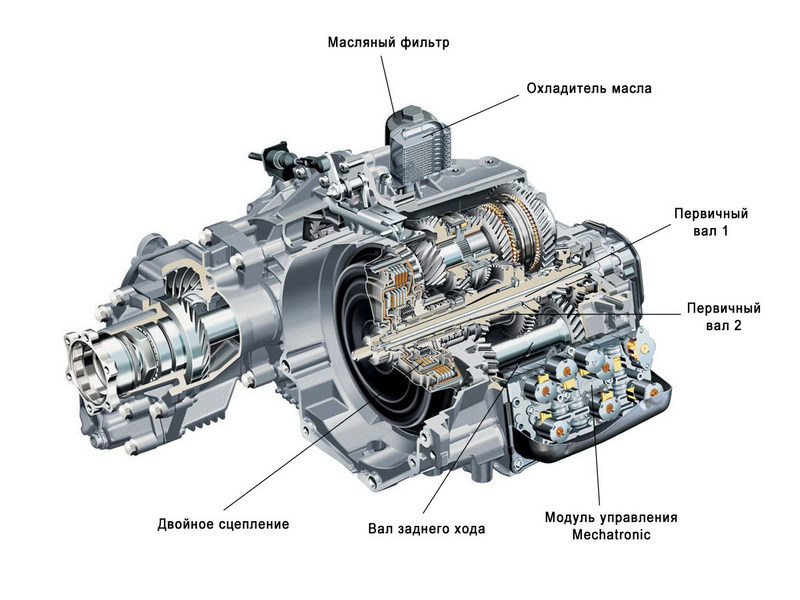 На этих объектах обычно работает более 2000 человек.
На этих объектах обычно работает более 2000 человек.
Это составит более 1300 сокращений в 55 американских центрах исполнения для запасов стандартного размера. По их словам, Amazon рассчитывает окупить затраты менее чем за два года из расчета 1 миллион долларов на машину плюс операционные расходы.
План, о котором ранее не сообщалось, показывает, как Amazon добивается сокращения рабочей силы и увеличения прибыли, поскольку автоматизация наиболее распространенной складской задачи — сбора товара — все еще недоступна.Изменения не завершены, потому что проверка технологии перед крупным развертыванием может занять много времени.
Amazon известен своим стремлением автоматизировать как можно больше частей своего бизнеса, будь то ценообразование или транспортировка товаров на своих складах. Но компания находится в шатком положении, поскольку она рассматривает возможность замены рабочих мест, которые принесли ей субсидии и общественную добрую волю.
«Мы пилотируем эту новую технологию с целью повышения безопасности, ускорения сроков доставки и повышения эффективности нашей сети», — говорится в заявлении представителя Amazon. «Мы ожидаем, что сэкономленные средства будут реинвестированы в новые услуги для клиентов, где будут и дальше создаваться новые рабочие места».
«Мы ожидаем, что сэкономленные средства будут реинвестированы в новые услуги для клиентов, где будут и дальше создаваться новые рабочие места».
(Дэйв Кларк — старший вице-президент Amazon по международным операциям)
В прошлом месяце Amazon преуменьшила свои усилия по автоматизации, чтобы посетить пресс-центр в Балтиморе, заявив, что до полностью роботизированного будущего далеко. База сотрудников компании выросла и стала одной из крупнейших в Соединенных Штатах, поскольку компания открыла новые склады и повысила заработную плату, чтобы привлечь сотрудников в условиях ограниченного рынка труда.
По словам одного из источников, ключом к достижению цели создания более компактной рабочей силы является убыль. По словам этого человека, вместо того, чтобы увольнять сотрудников, в один прекрасный день крупнейший в мире интернет-магазин воздержится от повторного заполнения позиций по упаковке. У них высокий оборот, потому что упаковка нескольких заказов в минуту в течение 10 часов требует больших затрат. В то же время сотрудники, которые остаются в компании, могут быть обучены выполнять более технические роли.
Новые машины, известные как CartonWrap итальянской фирмы CMC Srl, упаковываются намного быстрее, чем люди.Источники сообщили, что они производят от 600 до 700 коробок в час, что в четыре-пять раз больше, чем у упаковщика-человека. Машины требуют, чтобы один человек загружал заказы клиентов, другой запасался картоном и клеем, а технический специалист иногда устранял замятия.
CMC от комментариев отказалась.
Хотя Amazon объявила о намерении ускорить доставку по своей программе лояльности Prime, этот последний этап автоматизации не ориентирован на скорость. «Речь идет действительно об эффективности и экономии», — сказал один из собеседников.
Включая другие машины, известные как «SmartPac», которые компания недавно внедрила для отправки почтовых отправлений в запатентованных конвертах, технологический пакет Amazon сможет автоматизировать большинство упаковщиков, работающих с людьми. По его словам, пять рядов рабочих на предприятии могут превратиться в два, дополненных двумя машинами CMC и одним SmartPac.
Компания описывает это как попытку «перепрофилировать» рабочих, сказал человек.
Невозможно узнать, где в первую очередь могут исчезнуть роли и какие стимулы, если таковые имеются, связаны с этими конкретными работами.
Но сделки по найму, которые Amazon заключает с правительствами, часто бывают щедрыми. Например, в отношении 1500 рабочих мест, о которых Amazon объявила в Алабаме в прошлом году, штат пообещал компании 48,7 миллиона долларов в течение 10 лет, сообщает министерство торговли.
ЗАДАЧА ВЫБОРА
Не только Amazon тестирует упаковочную технологию CMC. Компании заявили, что JD.com Inc и Shutterfly Inc. также использовали машины, как и Walmart Inc, по словам человека, знакомого с пилотным проектом.
Walmart начал свою деятельность 3,5 года назад и с тех пор установил машины в нескольких местах в США. Компания отказалась от комментариев.
Интерес к боксерским технологиям проливает свет на то, как гиганты электронной коммерции подходят к одной из основных проблем современной логистики: найти руку робота, которая может хватать различные предметы, не ломая их.
Amazon нанимает бесчисленное количество сотрудников в каждом центре выполнения заказов, которые выполняют одну и ту же задачу.Некоторые складывают инвентарь, другие собирают заказы клиентов, а третьи собирают эти заказы, помещают их в коробку нужного размера и склеивают.
Многие венчурные компании и университетские исследователи спешат автоматизировать эту работу. Хотя достижения в области искусственного интеллекта повышают точность машин, все еще нет гарантии, что руки роботов могут предотвратить скольжение и поломку баночки с мармеладом или плавное переключение с подбора ластика на захват пылесоса.
Amazon протестировал технологии различных поставщиков, которые однажды могут быть использованы для выбора, в том числе от Soft Robotics, стартапа из Бостона, который черпал вдохновение из щупалец осьминога, чтобы сделать захваты более универсальными, сказал один человек, знакомый с экспериментами Amazon. Soft Robotics отказалась комментировать свою работу с Amazon, но сообщила, что занимается широким и постоянно меняющимся разнообразием продуктов для нескольких крупных розничных продавцов.
Полагая, что технология схватывания еще не готова к использованию в прайм-тайм, Amazon решает эту проблему при упаковке заказов клиентов.Люди по-прежнему кладут предметы на конвейер, но машины затем строят вокруг них коробки и заботятся о запечатывании и маркировке. Это экономит деньги не только за счет сокращения трудозатрат, но и за счет сокращения потерь упаковочных материалов.
Эти машины не лишены недостатков. CMC может производить только определенное количество в год. По словам двух источников, им нужен технический специалист на месте, который может устранять проблемы по мере их возникновения. Amazon предпочла бы обойтись без этого требования. Супер-горячий клей, закрывающий коробки, может скапливаться и останавливать машину.
Другие виды автоматизации, такие как роботизированная система сборки продуктовых магазинов Ocado Group PLC, вызывают большой интерес в отрасли.
Но боксерские машины уже доказали свою полезность для Amazon. По словам источников, компания установила их на загруженных складах, находящихся на большом расстоянии от Сиэтла, Франкфурта, Милана, Амстердама, Манчестера и других мест.
По словам одного из источников, машины могут автоматизировать более 24 рабочих мест на предприятии.По данным консалтинговой компании MWPVL International, компания также создает в США еще около двух десятков центров выполнения для небольших и неспециализированных складских запасов.
Это всего лишь предвестник грядущей автоматизации.
«В конечном итоге цель — создать склад с отключенным светом», — сказал один из людей.
Отчетность Джеффри Дастин из Сан-Франциско; дополнительные репортажи Нандиты Бозе в Вашингтоне и Джоша Хорвица в Шанхае; редактирование Грега Митчелла и Эдварда Тобина
Глоссарий терминов робототехники | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея
Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в окне подвесного программирования, и может быть подтверждено текущее значение робота.Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность
Точность — это измерение отклонения между характеристикой команды и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не является постоянной по всему рабочему пространству из-за влияния кинематики звена.
Активный совместимый робот
Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическое положение
Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии связи и т. Д.
Привод
Силовой механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию, чтобы вызвать движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо
Взаимосвязанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и руку или рабочий орган в пространстве. Сама рука не имеет рабочего органа.
См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор
Манипулятор с рукой, которая разделена на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение
Описывает сочлененное устройство, например сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу проникать в замкнутые пространства.
Сборочный робот
Робот, специально разработанный для соединения, подгонки или иным способом сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и соединения или подгонки их друг к другу, например, при производстве на конвейере.
Функция автоматического измерения
Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим
См. Режим воспроизведения.
Ось
Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Помехи осей
Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах заранее определенного диапазона.
База
Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую точку отсчета для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка
Стационарная базовая конструкция манипулятора, поддерживающая первый сустав.
Приработка
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Система автоматизированного проектирования (CAD)
Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для проектирования схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, строить линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты
Декартовы координаты — это тип системы координат, в которой положение точки в двухмерном пространстве определяется парой числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка указана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор
Декартов манипулятор — это манипулятор робота с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология
Топология, в которой используются призматические соединения, обычно расположенные перпендикулярно друг другу.
Робот в декартовых координатах
Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Здесь описываются движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3)
Категория 3 (категория 3) означает, что связанные с безопасностью части системы управления будут спроектированы таким образом, чтобы:
Единичные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от оси, расположенной в центре его масс, оно оказывает внешнюю радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой касательной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Круговой тип
Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим
Конечный эффектор, который служит пневматической рукой, которая контролирует захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим
Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима
При контакте может быть зажат части тела (частей).
Замкнутый
Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Отзыв.
Коллаборативный робот
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Интерпретатор команд
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция
Положение конечной точки движения робота, которого пытается достичь контроллер.
Соответствие
Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. В стрессовой ситуации низкая комплаентность будет жесткой системой.
Робот, соответствующий стандарту
Робот, который выполняет задачи в отношении внешних сил, изменяя свои движения таким образом, чтобы эти силы минимизировались. Указанное или разрешенное движение достигается за счет поперечного (горизонтального), осевого (вертикального) или вращательного податливости.
Конфигурация
Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одинаковому положению конечной точки.
Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь
Описывает процесс, в котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «От точки к точке».
Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления
Команда, подаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления
Любая часть оборудования управления, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления
Средства, с помощью которых инструкции передаются роботу.
Управляемость
Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Система контроллера
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рамка
Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех
Эта область представляет собой прямоугольный параллелепипед, параллельный базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение ЦТИ манипулятора внутри или вне этой области, и выводит это состояние в качестве сигнала.
Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикл Привод
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси.
Цилиндрическая топология
Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не пользуется популярностью в промышленности.
Выключатель аварийного отключения
Срок истек. См. Включение устройства.
степеней свободы
Количество независимых направлений или суставов робота (R15.07), которые позволяют роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод
Совместное срабатывание, в том числе без элементов передачи (т. Е. Тяга привинчена к выходу двигателя).
Время простоя
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время работы.
Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка
Метод подвода предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой транспортировкой робота или без него.
Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения
См. Включение устройства.
Разрешающее устройство
Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Кодировщик
Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью и датчик обратной связи».
EOAT
См. Захват или Концевой эффектор.
Рабочий орган
Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструментов, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка
Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка
Разница между фактическим ответом робота и отданной командой.
Возможность расширения
Возможность добавления ресурсов в систему, таких как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешней силы
Пороговое значение, при котором робот перемещается или сохраняет свое положение, даже когда применяются внешние силы (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором.
См. Управление обратной связью и Датчик обратной связи.
Управление с обратной связью
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается в контроллер робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью и датчик обратной связи».
Датчик обратной связи
Механизм, через который информация от сенсорных устройств возвращается в блок управления роботом. Информация используется в последующем направлении движения робота. См. Управление с обратной связью и управление с обратной связью.
Гибкость
Способность робота выполнять самые разные задачи.
Силовая обратная связь
Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. Обратная связь, Датчик обратной связи и Датчик силы.
Датчик силы
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
Решение для прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений шарниров.Для большинства топологий роботов это проще, чем найти обратное кинематическое решение.
Передняя кинематика
Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рама
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал
Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот
Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из системы намотки (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Гравитационная загрузка
Сила, действующая вниз, из-за веса манипулятора робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373) и «захватывания» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Рука
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.
Ручное управление
Совместная функция, позволяющая оператору вручную направлять робота в желаемое положение. Эта задача может быть достигнута за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Гармонический привод
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень
Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение
Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Задержка
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение
Известное и фиксированное местоположение на основной координатной оси манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК
Международная электротехническая комиссия
Индуктивный датчик
Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглощает достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в определенной близости. См. Датчик приближения.
Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМАЦИЯ
Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать его основные возможности для выполнения определенного набора ожиданий, а также описывать роботу посредством определения параметров и условий, каковы ожидания в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода
Разнообразные устройства, позволяющие взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция
Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд
Время, необходимое для цикла системы контроллера робота, чтобы декодировать команду или инструкцию перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор
Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот
Робот, который может быть запрограммирован на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех
Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции следующие: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция
Метод создания путей к конечным точкам. В общем, для задания движения несколько узловых точек определяются до того, как все промежуточные положения между ними вычисляются с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO
Международная организация по стандартизации
ISO 10218-1 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы
Специализированная спецификация безопасности робота, которая касается требований производителя, функциональности, требуемых показателей безопасности, опасностей, мер защиты и документации для самого робота.
ISO 10218-2 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 2: Роботные системы и интеграция
Сопутствующий документ ISO 10218-1. Эта спецификация безопасности представляет собой руководство как для конечных пользователей, так и для интеграторов роботов в части безопасного проектирования, установки и ввода в эксплуатацию роботизированных систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Коллаборативные роботы
Предоставляет подробные инструкции, отсутствующие в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби
Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА
JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Шарнир
Часть системы манипулятора, которая обеспечивает степень свободы поворота и / или поступательного перемещения звена рабочего органа.
Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и установки для конкретного движения.
Тип шарнира движения
Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство
а. Совместное пространство (или совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.
Соединения
Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартова робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (суставы, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковша
Конечный эффектор, который действует как совок. Обычно он используется для зачерпывания жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер
Акроним от Light Amplification by Stimulated Emission of Radiation. Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают: определение расстояния, точное определение местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.
Ссылки
Статический материал, который соединяет суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки
Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные извещатели
Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор
Машина или роботизированный механизм, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373)
См. Руку, запястье и рабочий орган
Ручной режим
См. Режим обучения.
Погрузочно-разгрузочные работы
Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, в период между моментом первого захвата материалов и их выпуском в производственном процессе.
Функция сдвига зеркала
С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на следующие три: импульсная функция зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима
В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность
Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые могут быть легко соединены или скомпонованы с другими частями или узлами.
Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения
Линия, определяющая ось движения либо линейного, либо поворотного сегмента манипулятора.
Двигатель
См. Серводвигатель.
Отключение звука
При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или части цикла.
Автономное программирование
Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода программной информации роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и производстве сборочных линий из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор
Лицо, уполномоченное запускать, контролировать и останавливать запланированную продуктивную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация
Угол, образованный большой осью объекта относительно исходной оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.Смотрите Roll, Pitch и Yaw.
Паллетирование
Процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) Организованным образом на поддоне.
Функция PAM — регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного смещения
Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного смещения, показанной ниже, значение смещения может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, потому что ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения обученного пути (или положения). В примере на рисунке ниже обученная позиция A сдвигается с шагом на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь
Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимальная
Максимальная масса, которой робот может манипулировать при указанной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и повторяемости при непрерывной работе в указанном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Обучающий кулон]
Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в память робота.
Кулон обучающий
Отображение и запись положения и ориентации системы робота и / или манипулятора по мере того, как робот вручную поэтапно перемещается от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, база робота и т. Д.) Записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на пути к своей конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, сохраненному в базе данных.
Уровень эффективности d (PLd)
Уровень эффективности ISO (PL) «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до <10-6.Кроме того, действуют и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень эффективности, указанный в ISO 10218-2, параграф 5.2.2, если оценка риска не позволит использовать более низкое значение.
Уровень эффективности e (PLe)
Уровень эффективности (PL) ISO «e» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-8 до <10-7.Кроме того, действуют и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.
Цикл подбора и размещения
Время, необходимое манипулятору, чтобы поднять объект и поместить его в желаемое место, а затем вернуться в исходное положение. Сюда входит время во время фаз ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка запрограммирована в управляющую память робота, а затем воспроизводится во время рабочего цикла.
Задача по подбору и размещению
Повторяющаяся задача передачи детали, состоящая из действия подбора, за которым следует действие размещения.
Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека могут быть зажаты между движущимися частями машины, или между движущейся и неподвижной частями машины, или между материалом и любой частью машины. .Точка защемления не обязательно должна приводить к травме конечности или части тела, хотя может привести к травме — она должна только защемить или ущипнуть человека, чтобы он не смог вырваться или вынуть зажатую часть из точки защемления.
Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки-манипулятора.
См. Крен и рыскание.
Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения для выполнения программы робота.В режиме воспроизведения воспроизводится программа робота. Это режим, в котором роботы используются в производстве.
Воспроизведение
Воспроизведение — это операция, с помощью которой воспроизводится обученное задание. Эта функция используется, чтобы решить, где возобновить воспроизведение при запуске операции после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: запускает операцию, когда курсор находится в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится в том месте, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновляется с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY — задание запускается кнопкой [СТАРТ] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний пусковой вход).
Точка-точка
Движение манипулятора, в котором задано ограниченное количество точек на прогнозируемой траектории движения.Манипулятор перемещается от точки к точке, а не по непрерывному плавному пути.
Поза
Альтернативный термин для конфигурации робота, который описывает линейное и угловое положение. Линейное положение включает азимут, высоту и дальность до объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. Смотрите Roll, Pitch и Yaw.
Позиция
Определение местоположения объекта в трехмерном пространстве, обычно определяемое трехмерной системой координат с использованием координат X, Y и Z.
Уровень позиции
Уровень положения — это степень приближения манипулятора к обученному положению. Уровень позиции может быть добавлен к командам перемещения MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. При установке соответствующего уровня манипулятор перемещается по траектории, подходящей для окружных условий и обрабатываемой детали. (см. рисунок справа)
Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в трехмерном пространстве, обычно определяемого трехмерной системой координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в задание.
Ограничение мощности и усилия (PFL)
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка рисков должна использоваться для определения необходимости дополнительных мер безопасности для снижения рисков в роботизированной системе.
Устройство защиты от присутствия
Устройство, спроектированное, сконструированное и установленное для создания сенсорного поля для обнаружения вторжения в такое поле людьми, роботами или объектами. См. Датчик.
Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода / вывода, памяти и устройства программирования, в котором обычно используются эквивалентные символы реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.
Программируемый робот
Функция, позволяющая проинструктировать робота выполнить последовательность шагов, а затем выполнять эту последовательность повторно.Затем его можно перепрограммировать для выполнения другой последовательности шагов, если это необходимо.
Датчик приближения
Бесконтактное сенсорное устройство, используемое для определения, когда объекты находятся на небольшом расстоянии, и оно может определять расстояние до объекта. Несколько типов включают: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного счета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.
Координаты импульса
Роботы Yaskawa определяют положение осей шарниров робота в градусах для поворотных шарниров.Импульс — это еще один способ указать положение сустава робота, и он используется при подсчете импульсов энкодера двигателя робота.
Обеспечение качества (ОК)
Описывает методы, политику и процедуры, необходимые для проведения тестирования обеспечения качества во время проектирования, производства и доставки этапов создания, перепрограммирования или обслуживания роботов.
Досягаемость: Объем пространства (конверт), которого может достичь рабочий орган робота, по крайней мере, в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между подвижной частью роботизированной системы и другой неподвижной или подвижной частью роботизированной ячейки
Вылет
Объем пространства (оболочки), которого может достичь рабочий орган робота хотя бы в одной ориентации.
Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в рамках временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров (выходов) управления системой, необходимых для правильной работы системы или процесса. От компьютера требуется, чтобы он выполнял свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через оконечное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базами данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.
Робот для воспроизведения записи
Манипулятор, для которого критические точки вдоль желаемых траекторий сохраняются последовательно путем записи фактических значений кодеров положения суставов робота, когда он перемещается под операционным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.
Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Рабочий конверт.
Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или объема использования (R15.02). Также называется: время безотказной работы робота или среднее время наработки на отказ (MTBF).
Восстановленное
Для обновления или модификации роботов в соответствии с пересмотренными спецификациями производителя. (R15.06)
Удаленный режим
Удаленный режим — это тип режима воспроизведения, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с обучающего пульта). В этом режиме использование обучающего пульта отключено.
Повторяемость
Мера того, насколько близко рука может повторно занять заданное положение.Например: после того, как манипулятор вручную помещен в определенное место и это местоположение определено роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное местоположение. Степень разрешения в системе управления роботом определяет повторяемость. В общем, воспроизводимость руки никогда не может быть лучше, чем ее разрешение. См. «Обучение и точность».
Разрешение
Количество шарнирного движения робота, необходимое для изменения положения на один счет.Хотя разрешение каждого датчика совместной обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах не является постоянным для поворотных рычагов из-за нелинейности кинематики рычага.
Поворотный шарнир
Суставы робота, способные совершать вращательные движения.
Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет прогнозируемых опасностей и последующего определения уровня риска, связанного с идентифицированными задачами.
Снижение рисков
Вторичный шаг в процессе оценки риска, который включает снижение уровня риска для идентифицированных задач путем применения мер по снижению риска с целью устранения или смягчения опасностей.
Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или определенных устройств посредством переменных запрограммированных движений для выполнения различных задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Рабочий орган.
Система координат робота
Система координат робота определяется в базовой оси робота, а точки в системе координат робота будут относиться к основе робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота одинаковы. (см. рисунок справа)
Робот-интегратор
См. Интегратор.
Язык программирования роботов
Интерфейс между человеком-пользователем и роботом, который связывает человеческие команды с роботом.
Робот для контроля пределов диапазона
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасности
Моделирование роботов
Метод имитации и прогнозирования поведения и работы роботизированной системы на основе модели (например, компьютерной графики) физической системы. (R15.07)
Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Pitch and Yaw.
Поворотный шарнир
Сустав, который скручивается, качается или изгибается вокруг оси.
Векторный поворотный привод (RV)
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси. См. Cyclo Drive и Harmonic Drive.
Вращательное движение
Сустав, который скручивается, качается или изгибается вокруг оси. Примером этого может служить локоть человеческой руки.
Гарантия
Барьерное ограждение, устройство или защитная процедура, предназначенные для защиты персонала. (R15.06)
Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод МЭК для определения уровня производительности системы безопасности. SIL 2 соответствует уровню эффективности ISO «d», а SIL 3 соответствует уровню эффективности ISO «e». ISO 10218 допускает использование того и другого.
Логическая схема безопасности
Логическая схема безопасности контролирует важные для безопасности внешние устройства, такие как световые завесы и генерируемые FSU сигналы.Логическая схема безопасности программируется через интуитивно понятный пользовательский интерфейс, который поддерживается подвесным пультом программирования Yaskawa. Это позволяет настроить логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.
Остановка с контролем безопасности
Совместная функция, разработанная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекратится, безопасность человека перейдет в рабочее пространство для совместной работы. Сервоприводы могут оставаться под напряжением в соответствии с остановкой категории 2 в соответствии с ISO 10218-1: 2011, 5.4. Оценка рисков должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Робот SCARA
Цилиндрический робот, имеющий два параллельных шарнирных соединения (шарнирно горизонтально) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA происходит от селективно совместимой руки для роботизированной сборки
Вторая исходная позиция
Помимо «исходного положения» манипулятора, второе исходное положение можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения — это исходное положение (где все оси находятся на импульсе 0). Вторую исходную позицию можно изменить.
Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают в себя: режим работы, режим редактирования, режим управления, режим безопасности и режим одноразового управления.
Датчик
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся окружающей среды робота, а также собственное позиционирование робота.Датчики реагируют на физические стимулы (такие как тепло, свет, звук, давление, магнетизм и движение), и они передают результирующий сигнал или данные для измерения, управления или того и другого. (R15.06)
Сенсорная обратная связь
Переменные данные, измеряемые датчиками и передаваемые на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер отправляет роботу сигнал об ошибке.Робот вносит необходимые корректировки в соответствии с сигналом ошибки.
Сервоуправление
Процесс, с помощью которого система управления роботом проверяет, соответствует ли достигнутая поза робота позе, указанной в планировании движения, с требуемыми критериями производительности и безопасности. (ISO 8373)
Серводвигатель
Электроэнергетический механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.
Сервопривод
Электроэнергетический механизм переменного тока, управляемый с помощью логики для преобразования энергии источника питания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемую на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и контроль торможения.
Робот с сервоприводом
Управление роботом с помощью сервосистемы с замкнутым контуром, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Замкнутую систему и Сервосистему.
Сервосистема
Система, в которой контроллер выдает команды на двигатели, двигатели приводят в движение рычаг, а датчик энкодера измеряет вращательные движения двигателя и сообщает о величине движения обратно контроллеру. Этот процесс повторяется много раз в секунду, пока рука не переместится в требуемую точку. См. Сервоуправляемый робот
Функция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает влияние столкновения робота путем остановки манипулятора без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.
Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных систем или систем с двумя руками, таких как Yaskawa Motoman® SDA10D.
SIL
См. Уровень полноты безопасности
Моделирование
Графическая компьютерная программа, представляющая робота и его окружающую среду, которая имитирует поведение робота во время имитационного запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать команду роботу выполнить такие задачи. Рассматриваются следующие элементы моделирования: трехмерное моделирование окружающей среды, эмуляция кинематики, эмуляция планирования пути и моделирование датчиков. См. Сенсор, Прямая кинематика и Робот.
Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся коаксиальными (выровненными по общей оси). В особой конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т.е.не имеет обратной) в этих конфигурациях.
SLURBT
SLURBT — это термины, которые Yaskawa Motoman использует для описания каждой оси робота для удобства. Определение каждого значения следующее:
S — качели или вертлюги
L — нижний рычаг
U — плечо
R — повернуть на
B — Колено
Т — Твист
Функция настройки Softlimit
Функция настройки Softlimit — это функция для установки диапазона ограничения перемещения оси движения манипулятора в программном обеспечении.
Контроль скорости и разделения
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Шлицевой
Гладкая непрерывная функция, используемая для аппроксимации набора функций, которые однозначно определены на наборе подинтервалов. Аппроксимирующая функция и набор аппроксимируемых функций пересекаются в достаточном количестве точек, чтобы обеспечить высокую степень точности приближения. Назначение плавной функции — позволить роботу-манипулятору выполнить задачу без рывков.
Сплайн Тип движения
Расчетный путь, который выполняет робот, который может иметь параболическую форму.Плавное движение также может образовывать кривую произвольной формы со смесью круглых и параболических форм.
Системный интегратор
См. Интегратор.
Обучение
Чтобы запрограммировать манипулятор, вручную направляя его через серию движений и записывая положение в память контроллера робота для воспроизведения.
Блокировка обучения
Пока установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться с использованием [START] или внешнего входа.В целях безопасности всегда устанавливайте переключатель режима в положение «ОБУЧЕНИЕ» перед началом обучения.
Режим обучения
Режим контроллера робота, в котором робот-манипулятор программируется путем ручного управления им через серию движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, не имеющие активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя включения в режиме обучения.
Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с подвесками для программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.
Окно обучения
Окно обучения — это экран пользовательского интерфейса на пульте программирования. Это окно содержит окно СОДЕРЖАНИЕ ЗАДАНИЯ, и в этом окне проводится обучение. Окно СОДЕРЖАНИЕ ЗАДАНИЯ содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. Д.
Балка проходная
Система обнаружения объектов, используемая в системе датчиков изображения робота. Точно сфокусированный луч света закреплен на одном конце, а детектор — на другом. Когда луч света прерывается, объект ощущается.
Функция измерения времени
Функция измерения времени измеряет время выполнения указанного раздела в задании или время вывода указанного сигнала.
Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, установленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. Д.См. Рука, захват и рабочий орган.
Инструмент и рука Вмешательство
В системе с одним контроллером и несколькими манипуляторами функция проверки взаимодействия инструмента и рычага может использоваться для обнаружения возможных помех и предотвращения столкновений во время работы. Можно проверить следующие три шаблона:
Плечо против руки
Рычаг против инструмента
Инструмент против инструмента
Интерференция проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.На обоих концах цилиндра помещается сфера. Если цилиндр и сферы одного манипулятора во время движения контактируют с цилиндрами другого манипулятора, манипуляторы останавливаются из-за обнаружения помех.
Центр инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на конце сварочного пистолета. После определения и настройки TCP движение робота будет определено относительно этого кадра (т.е.е., вращение в направлении Rx вызовет вращение вокруг оси X, и позиции будут обучаться в этом кадре.
Контрольная точка инструмента
См. Центр инструмента
Координаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, движется его система координат инструмента относительно фиксированной системы координат, например мировых координат. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.
Рама для инструмента
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).
Датчик касания
Чувствительное устройство, которое иногда используется с рукой или захватом робота, которое определяет физический контакт с объектом, тем самым давая роботу искусственное ощущение осязания. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.
Построение траектории (расчет)
Вычисление функций движения, которые позволяют плавно контролировать движение суставов.
Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Обычно это устройство, преобразующее входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или готовы к работе, в отличие от времени простоя.
Настройка координат пользователя
Координаты пользователя определяются тремя точками, которые были обучены манипулятору с помощью осевых операций.Эти три определяющие точки — ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — это исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y от пользовательских координат, которые были обучены, а направления осей Y и Z определяются точкой XY.
Пользовательская система координат
Пользовательская система координат — это любая контрольная точка, которую пользователь определил для своего приложения.Он часто прикрепляется к объекту, например поддону, и позволяет пользователю обучать точкам относительно этого объекта. Например, набор позиций можно обучить относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенести в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. Также «Настройка координат пользователя
Ручной вакуумный стакан
Конечный эффектор для руки робота, который используется для захвата объектов легкого и среднего веса с помощью всасывания для манипуляций.К таким предметам может относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении скольжения предметов, когда они находятся в пределах досягаемости вакуумной чашки. См. «Концевой эффектор».
Система визуального контроля
Система управления, в которой траектория движения робота изменяется в ответ на ввод от системы технического зрения.
Датчик технического зрения
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например телекамеры.
Рабочий конверт
Набор всех точек, до которых манипулятор может добраться без вторжения. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочий диапазон.
Рабочий конверт (космос)
Объем пространства, в котором робот может выполнять поставленные задачи.
Исходное рабочее положение
Исходное рабочее положение является ориентиром для операций с манипулятором.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в пределах установленного диапазона в качестве предварительного условия для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта программирования или ввода сигнала с внешнего устройства. Когда манипулятор находится в непосредственной близости от исходного рабочего положения, включается сигнал рабочего исходного положения.
Заготовка
Любая деталь, которая обрабатывается, совершенствуется или производится до того, как станет готовым продуктом.
Рабочее пространство
Объем пространства, в котором робот может выполнять поставленные задачи.
Мировые координаты
Справочная система координат, в которой рычаг манипулятора движется линейно по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Прямоугольные координаты.
Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.Поскольку объекты воспринимаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определять свои действия для выполнения поставленных задач.
Запястье
Набор поворотных соединений между манипулятором и рабочим органом робота, которые позволяют ориентировать рабочий орган по отношению к обрабатываемой детали. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканию.См. «Рука», «Рабочий орган», «Крен», «Шаг», «Рыскание» и «Деталь».
Запястье [вторичная ось]
Набор взаимосвязанных звеньев и механических соединений между рычагом и рабочим органом, который поддерживает, позиционирует и ориентирует рабочий орган. (ISO 8373)
Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Боковое движение по оси. Смотрите Roll and Pitch.
Автоматизация, робототехника и завод будущего
На одном заводе Fanuc в Ошино, Япония, промышленные роботы производят промышленных роботов, которыми руководит штат из четырех рабочих в смену.На заводе Philips по производству электробритв в Нидерландах численность роботов превышает девять рабочих более чем в 14 к 1. В 2013 году производитель фотоаппаратов Canon начал отказываться от человеческого труда на нескольких своих заводах. Будьте в курсе ваших любимых тем
Эта производственная концепция «без света», при которой производственная деятельность и материальные потоки обрабатываются полностью автоматически, становится все более распространенным атрибутом современного производства. Частично новая волна автоматизации будет вызвана теми же вещами, которые впервые принесли робототехнику и автоматизацию на рабочие места: освободить рабочих от грязных, скучных или опасных работ; улучшить качество за счет исключения ошибок и уменьшения вариативности; и сократить производственные затраты за счет замены все более дорогих людей все более дешевыми машинами.Однако самые передовые системы автоматизации сегодня обладают дополнительными возможностями, позволяющими использовать их в средах, которые до сих пор не подходили для автоматизации, и позволяют использовать совершенно новые источники ценности в производстве.
Падение цен на роботов
По мере роста производства роботов затраты снизились. За последние 30 лет средняя цена робота упала вдвое в реальном выражении и даже больше по сравнению с затратами на рабочую силу (Иллюстрация 1). Поскольку спрос в странах с развивающейся экономикой стимулирует смещение производства роботов в регионы с более низкой стоимостью, они, вероятно, станут еще дешевле.
Приложение 1
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему сайту. Если вам нужна информация об этом содержании, мы будем рады работать с вами. Напишите нам по адресу: [email protected]Доступный талант
Люди с навыками, необходимыми для проектирования, установки, эксплуатации и обслуживания роботизированных производственных систем, также становятся все более доступными. Когда-то инженеры-робототехники были редкими и дорогими специалистами.Сегодня эти предметы широко преподаются в школах и колледжах по всему миру либо на специальных курсах, либо как часть более общего образования по производственным технологиям или инженерному проектированию для производства. Доступность программного обеспечения, такого как пакеты моделирования и автономные системы программирования, которые могут тестировать роботизированные приложения, сократила время разработки и риски. Это также сделало задачу программирования роботов проще и дешевле.
Простота интеграции
Благодаря развитию вычислительной мощности, методов разработки программного обеспечения и сетевых технологий сборка, установка и обслуживание роботов стали быстрее и дешевле, чем раньше.Например, если раньше датчики и исполнительные механизмы должны были быть индивидуально подключены к контроллерам роботов с выделенной проводкой через клеммные стойки, разъемы и распределительные коробки, теперь они используют технологии plug-and-play, в которых компоненты могут быть подключены с помощью более простой сетевой проводки. Компоненты автоматически идентифицируются для системы управления, что значительно сокращает время настройки. Эти датчики и исполнительные механизмы также могут контролировать себя и сообщать о своем состоянии системе управления, что помогает контролировать процесс и собирать данные для технического обслуживания, а также для постоянного улучшения и устранения неполадок.Другие стандарты и сетевые технологии также упрощают подключение роботов к более широким производственным системам.
Новые возможности
Роботы тоже становятся умнее. В то время как ранние роботы слепо следовали одному и тому же пути, а более поздние итерации использовали лазеры или системы технического зрения для определения ориентации деталей и материалов, последние поколения роботов могут интегрировать информацию от нескольких датчиков и адаптировать свои движения в реальном времени. Это позволяет им, например, использовать обратную связь по усилию для имитации навыков мастера в шлифовании, удалении заусенцев или полировке.Они также могут использовать более мощные компьютерные технологии и анализ в стиле больших данных. Например, они могут использовать спектральный анализ для проверки качества сварного шва в процессе его изготовления, что значительно сокращает количество требуемых послепроизводственных проверок.
Роботы берут на себя новые роли
Сегодня эти факторы помогают ускорить внедрение роботов в тех областях применения, в которых они уже сегодня преуспевают: повторяющиеся крупномасштабные производственные операции. По мере того, как стоимость и сложность автоматизации задач с помощью роботов снижается, вполне вероятно, что компании, уже использующие роботов, будут использовать их еще больше.Однако в ближайшие пять-десять лет мы ожидаем более фундаментальных изменений в видах задач, для решения которых роботы станут технически и экономически жизнеспособными (Иллюстрация 2). Вот несколько примеров.
Приложение 2
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему сайту. Если вам нужна информация об этом содержании, мы будем рады работать с вами. Напишите нам по адресу: McKinsey_Website_Accessibility @ mckinsey.comМелкосерийное производство
Присущая устройству гибкость, которую можно быстро и легко программировать, значительно сокращает количество раз, которое робот должен повторять заданную задачу, чтобы оправдать затраты на его покупку и ввод в эксплуатацию. Это снизит порог объема и сделает роботов экономичным выбором для нишевых задач, где годовые объемы измеряются десятками или сотнями, а не тысячами или сотнями тысяч. Это также сделает их жизнеспособными для компаний, работающих с небольшими партиями и значительным разнообразием продукции.Например, продукты с гибкими гусеницами, которые сейчас используются в аэрокосмической отрасли, могут «ползать» по фюзеляжу, используя зрение для управления своей работой. Снижение затрат, предлагаемое таким типом автоматизации небольшого объема, принесет пользу многим различным организациям: небольшие компании впервые получат доступ к робототехнике, а более крупные могут расширить разнообразие своих продуктов.
Хотите узнать больше о нашей операционной практике?Новые технологии, вероятно, еще больше упростят программирование роботов.Хотя уже принято обучать роботов, проводя их через серию движений, например, быстрое совершенствование технологии распознавания голоса означает, что вскоре станет возможным давать им устные инструкции.
Задачи с высокой степенью вариативности
Достижения в области искусственного интеллекта и сенсорных технологий позволят роботам справляться с гораздо большей степенью изменчивости задач. Способность адаптировать свои действия в ответ на изменения в окружающей среде создаст возможности для автоматизации в таких областях, как переработка сельскохозяйственной продукции, где существует значительная вариативность по частям.В Японии испытания уже продемонстрировали, что роботы могут сократить время, необходимое для сбора урожая клубники, до 40 процентов, используя систему стереоскопического изображения для определения местоположения фруктов и оценки их спелости.
Эти же возможности будут способствовать повышению качества во всех секторах. Роботы смогут компенсировать потенциальные проблемы с качеством во время производства. Примеры здесь включают изменение силы, используемой для сборки двух частей, на основе разницы в размерах между ними, или выбор и объединение различных размеров компоненты для достижения правильных окончательных размеров.
Данные, сгенерированные роботами, и передовые методы анализа, позволяющие лучше их использовать, также будут полезны для понимания основных факторов качества. Если требования к крутящему моменту, превышающие нормальные, во время сборки оказываются связаны с преждевременным выходом продукта из строя на месте, например, в производственных процессах может быть адаптирован для обнаружения и устранения таких проблем во время производства.
Комплексные задачи
В то время как современные роботы общего назначения могут контролировать свое движение с точностью до 0.10 миллиметров, некоторые текущие конфигурации роботов имеют повторяемую точность 0,02 миллиметра. Будущие поколения, вероятно, предложат еще более высокий уровень точности. Такие возможности позволят им участвовать во все более сложных задачах, таких как заправка игл или сборка очень сложных электронных устройств. Роботы также становятся более скоординированными, благодаря наличию контроллеров, которые могут одновременно управлять десятками осей, что позволяет нескольким роботам работать вместе над одной задачей.
Наконец, передовые сенсорные технологии и компьютерные мощности, необходимые для анализа данных с этих сенсоров, позволят роботам выполнять такие задачи, как огранка драгоценных камней, которые ранее требовали высококвалифицированных мастеров. Те же технологии могут даже разрешать действия, которые сегодня невозможно выполнить вообще: например, регулировка толщины или состава покрытий в режиме реального времени, когда они применяются для компенсации отклонений в основном материале, или «рисование» электронных схемы на поверхности конструкций.
Работаем вместе с людьми
Компании также будут иметь гораздо больше свободы решать, какие задачи автоматизировать с помощью роботов, а какие выполнять вручную. Усовершенствованные системы безопасности означают, что роботы могут занять новые позиции рядом со своими коллегами-людьми. Если датчики указывают на риск столкновения с оператором, робот автоматически замедлится или изменит свой путь, чтобы избежать столкновения. Эта технология позволяет использовать роботов для выполнения индивидуальных задач на сборочных линиях, которые обычно выполняются вручную. А удаление защитных ограждений и блокировок означает снижение затрат — благо для небольших компаний.Возможность размещать роботов и людей рядом и перераспределять задачи между ними также способствует повышению производительности, поскольку позволяет компаниям перебалансировать производственные линии при колебаниях спроса.
Роботы, которые могут безопасно работать в непосредственной близости от людей, также проложат путь для приложений вдали от жестко контролируемой среды производственного цеха. Интернет-магазины и логистические компании уже внедряют роботизированную автоматизацию на своих складах. Однако представьте себе преимущества производительности, доступные курьеру по доставке посылок, если бы бортовой робот мог предварительно отсортировать посылки в транспортном средстве между доставками.
Гибкие производственные системы
Системы автоматизации становятся все более гибкими и интеллектуальными, автоматически адаптируя свое поведение для увеличения производительности или минимизации затрат на единицу продукции. Экспертные системы, используемые на линиях розлива и упаковки напитков, могут автоматически регулировать скорость всей производственной линии в зависимости от того, какая деятельность является критическим ограничением для данной партии. В автомобильном производстве экспертные системы могут автоматически вносить небольшие изменения в скорость линии, чтобы улучшить общий баланс отдельных линий и максимизировать эффективность всей производственной системы.
В то время как подавляющее большинство роботов, используемых сегодня, по-прежнему работают в высокоскоростных крупносерийных производственных приложениях, самые передовые системы могут вносить корректировки на лету, плавно переключаясь между типами продуктов без необходимости останавливать линию для изменения программ или перенастроить инструменты. Многие текущие и новые производственные технологии, от резки с числовым программным управлением (ЧПУ) до трехмерной печати, позволяют регулировать геометрию компонентов без необходимости смены инструмента, что позволяет производить партии размером до одного.Например, один производитель промышленных компонентов использует обмен данными в реальном времени с помощью меток радиочастотной идентификации (RFID) для корректировки форм компонентов в соответствии с требованиями различных моделей.
Замена стационарных конвейерных систем на автоматизированные управляемые транспортные средства (AGV) даже позволяет предприятиям плавно переконфигурировать поток продуктов и компонентов между различными рабочими станциями, позволяя выполнять производственные последовательности с совершенно разными этапами процесса в полностью автоматизированном режиме.Такая гибкость дает множество преимуществ: сокращение времени выполнения заказа и более тесная связь между спросом и предложением, ускорение вывода на рынок новых продуктов и упрощение производства продуктов с высокой степенью индивидуализации.
Принятие правильных решений по автоматизации
С таким огромным технологическим потенциалом, как компании выбирают лучшую стратегию автоматизации? Может быть слишком легко увлечься автоматизацией ради нее самой, но результатом такого подхода почти всегда являются проекты, которые стоят слишком дорого, требуют слишком много времени для реализации и не соответствуют поставленным бизнес-целям.
Успешная стратегия автоматизации требует хороших решений на нескольких уровнях. Компании должны выбрать, какие действия следует автоматизировать, какой уровень автоматизации использовать (от простых контроллеров с программируемой логикой до сложных роботов, управляемых датчиками и интеллектуальными адаптивными алгоритмами) и какие технологии следует принять. На каждом из этих уровней компании должны обеспечить соответствие своих планов следующим критериям.
Великая переделка: производство для современностиЭтот сборник из 21 статей дает практические советы руководителям производства, которые хотят быть на шаг впереди сегодняшних сбоев.
Стратегия автоматизации должна согласовываться со стратегией бизнеса и операций. Как мы уже отмечали выше, автоматизация позволяет достичь четырех основных целей: повышение безопасности работников, снижение затрат, повышение качества и повышение гибкости. При правильном выполнении автоматизация может обеспечить улучшения во всех этих областях, но баланс преимуществ может варьироваться в зависимости от различных технологий и подходов. Правильный баланс для любой организации будет зависеть от ее общей операционной стратегии и бизнес-целей.
Программы автоматизации должны начинаться с четкой формулировки проблемы. Также важно указать причины, по которым автоматизация является правильным решением. Каждый проект должен иметь возможность определять, где и как автоматизация может предлагать улучшения, и показывать, как эти улучшения связаны с общей стратегией компании.
Автоматизация должна демонстрировать явную окупаемость инвестиций. Компаниям, особенно крупным, следует позаботиться о том, чтобы не переоценивать, не усложнять и не перерасходовать свои инвестиции в автоматизацию.Выбор правильного уровня сложности для удовлетворения текущих и прогнозируемых будущих потребностей требует глубокого понимания процессов и производственных систем организации.
Платформа и интеграция
Компании сталкиваются с растущим давлением, требующим максимальной отдачи от своих капитальных вложений и сокращения времени, необходимого для перевода новых продуктов от проектирования до полномасштабного производства. Системы автоматизации зданий, подходящие только для одной линейки продуктов, противоречат обеим этим целям, требуя повторяющихся, длительных и дорогостоящих циклов проектирования оборудования, поставки и ввода в эксплуатацию.Лучшим подходом является использование производственных систем, ячеек, линий и фабрик, которые можно легко модифицировать и адаптировать.
Подобно тому, как стратегии платформенности и модульности упростили и снизили стоимость управления сложными портфелями продуктов, платформенный подход будет приобретать все большее значение для производителей, стремящихся максимизировать гибкость и экономию на масштабе в своих стратегиях автоматизации.
Технологические платформы, такие как манипулятор, оснащенный сварочным пистолетом, источником питания и управляющей электроникой, можно стандартизировать, применять и повторно использовать в различных приложениях, что упрощает программирование, обслуживание и поддержку продукта.
Системы автоматизации также должны быть хорошо интегрированы в другие системы организации. Эта интеграция начинается с обмена данными между машинами в производственном цехе, что упрощается благодаря современным технологиям промышленных сетей. Но это также должно распространяться на более широкую организацию. Прямая интеграция с системами автоматизированного проектирования, компьютерно-интегрированного проектирования и планирования ресурсов предприятия ускорит проектирование и развертывание новых производственных конфигураций и позволит гибким системам практически в реальном времени реагировать на изменения спроса или доступности материалов.Данные о переменных процесса и производственных показателях, протекающих в обратном направлении, будут регистрироваться в целях обеспечения качества и использоваться для информирования об улучшении дизайна и будущих поколениях продукции.
Интеграция также будет выходить за пределы завода. Компаниям потребуется не просто тесное сотрудничество и беспрепятственный обмен информацией с клиентами и поставщиками; им также необходимо будет наладить такие отношения с производителями технологического оборудования, которые будут все больше владеть ноу-хау и интеллектуальной собственностью, необходимыми для обеспечения оптимальной работы систем автоматизации.