Как почистить лямбда зонд своими руками в домашних условиях: промывка лямбда зонда
Оборудование автомобилей катализаторами — итог внедрения экологических норм. Основная задача — снизить вредное воздействие работы двигателей автомобилей на окружающую среду. Для этого необходимо снизить содержание токсинов, содержащихся в выхлопных газах. Несомненно, катализаторы необходимы, однако для их правильной работы требуются специальные условия и контроль состава воздуха и топлива. В противном случае они не прослужат долго. Поэтому оборудование автомобилей кислородным датчиком или лямбда зондом становится настоящим помощником для контроля состава выхлопных газов.
Устройство, принцип работы
Лямбда зонд предназначен для измерения показателя кислорода в выхлопных газах, поддержки оптимального состава топлива и воздуха, которые поступают в двигатель. Норма для такого соотношения равняется 14.6–14.8 частям воздуха и 1 части топлива.
Расположен перед катализатором в выпускном коллекторе.
Разливают несколько видов датчика. Одними из самых распространенных считаются циркониевый, титановый и широкополосной. Он состоит из нескольких основных элементов:
- Корпус, вмещает все элементы
- Защитная колба, оснащена специальными отверстиями через которые проходят выхлопные газы
- Электроды: наружный — отвечает за взаимодействие с выхлопными газами, внутренний — с атмосферой. Имеют платиновое напыление
- Электролит на основе диоксида циркония, который располагается между электродами
- Нагревательный элемент, необходим для подогрева кислородного датчика. Подогрев нужен для обеспечения проводимости электролита. Необходимая температура около 400 °С
Принцип работы заключается в том, что при достижении нужной температуры электролита, кислород вместо с отработанными газами проходят сквозь него. При этом между чувствительными к ионам кислорода образуется разность потенциалов. Между напряжением, которое возникает на электродах, и концентрацией кислорода в выхлопных газах существует обратная зависимость. Чем больше содержание кислорода тем меньше напряжение.
При этом между чувствительными к ионам кислорода образуется разность потенциалов. Между напряжением, которое возникает на электродах, и концентрацией кислорода в выхлопных газах существует обратная зависимость. Чем больше содержание кислорода тем меньше напряжение.
Титановым устройствам необходима более высокая температура для нагревания, порядка 700 ºС. Их чувствительный элемент состоит из диоксида титана. Они измеряют выходное напряжение, функционируют без воздуха из атмосферы.
Широкополосной датчик кислорода считается более усовершенствованным. Он имеет заканчивающий элемент. Само устройство измеряет количество кислорода, фиксирует напряжение, сравнивает показатели с нормой и, если обнаружено несоответствие, направляет электрический ток. Он провоцирует выделение кислорода из выхлопных газов. Процесс длится до тех пор, пока напряжение не достигнет величины 450 мВ. Чаще используется на входе.
Как проверить
Данный вид датчиков считается одним из часто изнашиваемых. На него постоянно оказывают влияние отработанные газы, немаловажным фактором является качество топлива, с которым приходится работать, а также исправность двигателя. О неисправности и неполадках сообщит соответствующая лампочка на панели приборов. В данном случае выявить проблемы именно с этим датчиком поможет диагностика с помощью сканера. Также о возникших проблемах будет свидетельствовать потеря мощности, «рывки» в работе двигателя в режиме холостого хода, минимальный отклик на педаль газа. Увеличится токсичность выхлопных газов, определить которую можно только при измерении специальным прибором. Произойдет увеличение расхода топлива.
На него постоянно оказывают влияние отработанные газы, немаловажным фактором является качество топлива, с которым приходится работать, а также исправность двигателя. О неисправности и неполадках сообщит соответствующая лампочка на панели приборов. В данном случае выявить проблемы именно с этим датчиком поможет диагностика с помощью сканера. Также о возникших проблемах будет свидетельствовать потеря мощности, «рывки» в работе двигателя в режиме холостого хода, минимальный отклик на педаль газа. Увеличится токсичность выхлопных газов, определить которую можно только при измерении специальным прибором. Произойдет увеличение расхода топлива.
К основным причинам выхода из строя можно отнести: износ (каждый датчик имеет свой ресурс пробега), грязь, влага, механическое воздействие, которое приводят к сколам и трещинам, а также обрыв цепи нагревательного элемента. Более быстрому износу будут способствовать топливо низкого качества, частый перегрев двигателя, попадания масла, попадания моющих средств, добавление присадок в топливо.
Замена или ремонт
Неисправный прибор приводит к быстрому износу других ключевых деталей двигателя, влияет на качество управления автомобилем в целом. При обнаружении неработающего устройства его необходимо заменить на новое. Если же причиной неполадок становятся загрязнения, то есть вероятность вернуть его к жизни. Прежде чем выполнить чистку необходимо знать можно ли почистить лямбда зонд своими руками или лучше довериться профессионалам. В связи со специфической системой работы на приборе часто накапливается копоть, а продукты горения заполняют внутреннюю часть. Это позволяет работать, но с перебоями. Такую работу вполне можно выполнить в домашних условиях.
Прежде чем приступать к очистке необходимо снять датчик. На разных моделях авто эти действия будут выполняться по-разному, но в целом механизм действий один. Для начала стоит обеспечить место для работ, которое будет наиболее удобно для отключения и снятия датчика. Это может быть эстакада или яма. Затем нужно отсоединить клемы проводов, которые идут к самому лямбда зонду. Далее с помощью ключа нужного размера демонтируется сам прибор. Выполнять работы стоит только после полного охлаждения двигателя.
Вариантов очистки несколько:
- Замачивание в кислоте. Чаще всего используется ортофосфорная. Самый простой и быстрый метод, не требующий больших затрат времени и денег. Наибольшую сложность составляет необходимость доступа к основанию, которое находится за металлическим колпачком. Можно сделать надрез колпачка возле резьбы с помощью токарного станка. Второй вариант — проделать напильником окошки, через которые поступит жидкость. Для полного очищения сердечник лямбда зонда помещают в емкость на 20–25 минут. Его нельзя помещать в химическое вещество полностью. После этого его необходимо тщательно промыть, желательно теплой водой и затем высушить. Если имеются сильные загрязнения можно использовать зубную щетку, смоченную в растворе кислоты. При наличии засоров рекомендуется увеличить время выдержки до 2–3 часов.
 Выбирая этот метод, не стоит пренебрегать мерами безопасности, поскольку ортофосфорная кислота крайне опасна.
Выбирая этот метод, не стоит пренебрегать мерами безопасности, поскольку ортофосфорная кислота крайне опасна. - С помощью нагревания и кислоты. Понадобится все та же ортофосфорная кислота и газовая горелка. Сердечник необходимо окунуть в кислоту, затем поднести к пламени горелки и нагревать до появления на поверхности зелено-голубой соли и полного выкипания кислоты с поверхности. Затем промыть водой и по необходимости повторить действия. Данный способ более быстрый, занимает не больше 10–15 минут. Однако меры безопасности нужно соблюдать и в этом случае. При нагревании кислота разбрызгивается.
 Выбирая этот метод, не стоит пренебрегать мерами безопасности, поскольку ортофосфорная кислота крайне опасна.
Выбирая этот метод, не стоит пренебрегать мерами безопасности, поскольку ортофосфорная кислота крайне опасна.Если колпачок был снят с помощью спила на токарном станке, то на место его можно вернуть с помощью аргоновой сварки. Вместо ортофосфорной кислоты можно использовать любую жидкость для удаления ржавчин, типа WD. Прежде чем производить установку очищенного прибора стоит уделить внимание уплотнительному кольцу. Также необходимо смазать готовый датчик графитовой смазкой. Так он будет защищен от пригорания. Когда знаешь, как почистить лямбда зонд, какие есть действенные способы, работа не покажется сложной, ее вполне под силу выполнить самому.
Когда знаешь, как почистить лямбда зонд, какие есть действенные способы, работа не покажется сложной, ее вполне под силу выполнить самому.
Видео по теме
Хорошая реклама
Отключение лямбда зонда программно | Цены в Москве
Программное отключение лямбда зонда производится в том случае, если у автомобиля удалили стандартный катализатор из выхлопной системы или датчик вышел из строя и не хочется покупать дорогостоящий новый.
Отключение нужно для того, чтобы убрать программные ошибки при пользовании автомобилем, таких как «check engine», ведь электроника современных авто очень капризна и при неисправности лямбда — зонда может троить двигатель, увеличиваться расход топлива, так как невозможно будет правильно считать количество газов, вышедших из системы, или машина вовсе не запустится. Программируется такое отключение индивидуально под каждый объем двигателя, год выпуска и марку автомобиля.
Стоимость отключения лямбда зонда:
| Наименование услуги | Цена |
|---|---|
| Диагностика | бесплатно |
| Замена | от 500 руб |
| Установка обманки | от 1000 руб |
| Программное отключение | от 3000 руб |
Лямбда зонд – это датчик, который относится непосредственно к выхлопной системе. Он находится в самой выхлопной системе и замеряет содержание/качество выхлопных газов. А точнее — уровень кислорода в выхлопных газах.
Функционал у разных лямбда-зондов абсолютно разный.
Есть передний датчик, который контролирует работу двигателя, а точнее – смесеобразование. То есть для того, чтобы было более понятно. Лямбда зонд – это как раньше, у кого был опыт и кто столкнулся с «жигулями» с карбюраторными, либо с «москвичами». В них были такие регулировочные винты, качества состава смеси. И когда крутишь этот винтик, машинка начала немного по-другому работать, более плавнее – то есть это была регулировка качества смеси.
 И за счет этого достигается максимальное качество смесей и оптимально правильная работа двигателя, более четкое сжигание топлива при разных качествах бензина который поступает в двигатель.
И за счет этого достигается максимальное качество смесей и оптимально правильная работа двигателя, более четкое сжигание топлива при разных качествах бензина который поступает в двигатель.
Также есть «второй» лямбда-зонд, который находится возле катализатора. У этого лямбда основная функция – это отслеживать состояние катализатора, в каком состоянии (исправен или нет) он находится.
Когда загорается «Джеки чан» (Check Engine = проверьте двигатель) у автомобиля. Это говорит о том, что лямбда-зонд следил за состоянием катализатора и понял то, что его нужно менять. Когда мы меняем катализатор – заменяем его либо на эмулятор (пламегситель), либо на нештатный катализатор – лямбда-зонд получает уже другие значения, которые могут в двигатель передаваться как «ошибка». Когда мы удаляем катализатор, ставим пламегаситель, либо там производим другие процедуры – нам нужно понимать, как обмануть датчик, потому что он будет видеть, что катализатор отсутствует или неисправен. И поэтому туда устанавливается либо программный, либо электронный эмулятор, либо делается программное отключение этих датчиков из автомобиля – программа называется Евро 2 – то есть из автомобиля вообще выписывается «задние» датчики и автомобиль работает только на «верхних датчиках» – все.
Так как второй датчик не влияет на режим работы двигателя, он не вносит никакие регулирующие функции, собственно, ничего критичного. Просто он начинает эмулировать для двигателя что все в порядке.
Существуют еще механические обманки. Мы их не рекомендуем, потому что это более «старый» такой метод обмана. Принцип заключается в том, что датчик кислорода просто отдаляется от прямого потока выхлопных газов, за счет чего на лямбда-зонд попадает меньше выхлопных газов, меньше гари – соответственно, он понимает – «как будто бы» катализатор на месте. Но показания лямбда-зонда всегда в «усредненных» значениях находятся. То есть лямбда-зонд понимает, что – ага, вроде бы вот-вот-вот, кажется, что сейчас надо выдать ошибку, и через какое-то время ты остановился, например, просто едешь на холостых – он понимает – о, ну вроде нормально. То есть он постоянно находится – либо выдать, либо не выдать, либо выдать, либо не выдать ошибку. И эта обманка как раз и создает такие условия, но какие минусы? Check в результате все равно загорится через какой-то промежуток времени — плохое качество, например, топлива.
То есть он постоянно находится – либо выдать, либо не выдать, либо выдать, либо не выдать ошибку. И эта обманка как раз и создает такие условия, но какие минусы? Check в результате все равно загорится через какой-то промежуток времени — плохое качество, например, топлива.
Даже элементарно 95-98-ой заливают, и за счет разницы топлива может выдать ошибку. И второе, почему не стоит использовать механическую обманку – это, как правило, всегда увеличенный расход топлива на 1,5-2 литра. Потому что показания «усредненные», лямбда-зонд – «понимает», что катализатор уже вот-вот подходит к выходу из строя, и начинает давать более богатую смесь (команды в блок управления двигателя, чтобы он давал более богатую смесь на форсунке). И тем самым, двигатель находится уже почти в аварийном режиме. А если он в аварийном режиме, то увеличен расход топлива. Поэтому механическая обманка – это вероятность того, что загорится check – первое, второе – что будет увеличен расход топлива по любому. И срок службы ее примерно полгода – максимум.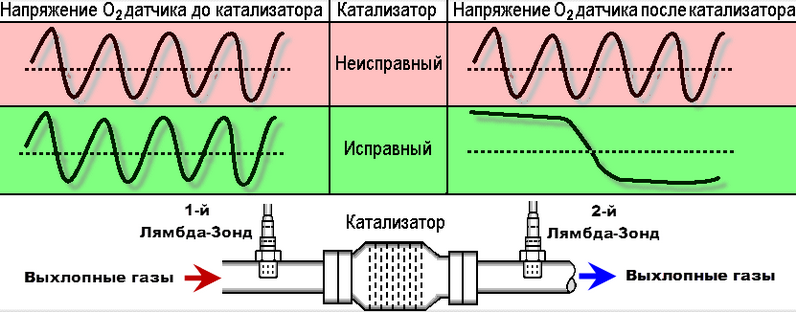
На машине если лямбда-зонд, который отвечает за катализатор, выдает ошибку – соответственно, машина может перейти в аварийный режим.
Что такое аварийный режим для автомобиля?
Check – это общая ошибка. К ней привязана порядка 400 — 1000 вариантов ошибок датчиков и их значений и комбинаций. И из них может произойти в любой момент, в любое время – что угодно. И когда загорается check, блок управления двигателя автоматически ставит машину в аварийный режим. Аварийный режим – это такой более щадящий, безопасный, который не дает максимально развивать потенциал двигателя, держит его в определенных рамках, критериях, и делает смесеобразование таким, чтобы можно было доехать до сервиса и там продиагностироваться, посмотреть с практически любой проблемой двигателя.
Поэтому мы и рекомендуем всем кто меняет/удаляет катализатор именно программное отключение лямбда-зонда.
Volta Sensors Decoding v1. 2 RUS
 2 RUS
2 RUSVolta Sensors Decoding v1.2 RUS/ENG
Имя: Volta Sensors Decoding
Версия: 1.2
Язык: Русский.
Размер: 6 мб.
Платформа: Windows (XP, 7, 8, 8.1) как 32bit так и 64bit.
Скачать: Volta_Sensors_Decoding_v1.2_RUS.rar
Дополнительная привязка еще на один компьютер стоит 350р.
Описание: Программа позволяет удалять, FAP, EGR, DPF, IMMO буквально в 3 клика, для работы нам понадобится считанная прошивка — дамп скаченный с самой микросхемы в full формате, выбираем дамп прошивки нажимаем «Decode file» и сохраняем готовый дамп, все Volta v1.2 RUS сделает сама. Как утверждают производители на официальном сайт что Вольта Sensors Decoding поддерживает дампы все известных программаторов, что существенно упрощает нам жизнь.
Если вы занимаетесь удалением FAP, DPF сажевых фильтров физически, то это программа Professional EGR Remover v1.4.45 — Удаление ЕГР, ИММО будет не заменимым помощником в этом.
Список поддерживаемых автомобилей Volta Sensors Decoding v1.2 RUS можно скачать по ссылке ниже, он не полный, но есть свежие машины.
Скачать список автомобилей: Spisok_ecu_Volta_1.2.rarВнимание!!
Остерегайтесь версии программы расположенную на других сайтах и всегда уточняйте и просите показать файлы самой программы, вот наша версия которая прошла тесты:
А Если же вам хотят вам в парить программу на картинке ниже, да еще и за деньги:
То знайте, что ничего хорошего вы не приобретете кроме вирусов ворующих пароли, эта тема уже обсуждалась на форумах, будьте бдительны!
Наша версия программы прошла тесты на марках авто:
Opel Combo 1.3 CDTI блок марелли — пару байт подняло по уровню. итог — ЕГР закрыт. но при снятии разъема ругается, пробовал вместо него лампочку совать молчит. И контрольку посчитала
IVECO с блоком EDC16C39 поправила пару карт. ЕГР закрыт, на заглушенном егр ошибку не бьет, но при торможении двигателем на оборотах близко к холостым , кратковременно появляется импульс управления (согласно диагностики)
DPF
Peugeot 607 с блоком EDC15 прибила сажу и бачок с присадкой (с десяток байт)
VAG группа с блоком EDC16 — делает «стандарт» и плюс одну карту режет и немного маски, маску не нужно было бы, лучше возвращать. ..
..
Mersedes EDC16 — после нее либо передув, либо глохнет на оборотах. Рабочая ни разу не вышла, пробовал штук 15 машин
Побывал прогонять через прогу пежо 307 2.0hdi EDC15C2 на предмет удаления сажевика результат таков—делает 100% как и SAFE,но только не считает контрольку.
на пассате 1,6FSI 2006г.в. пробовал удалить 2 лямбду— в результате прога вообще ничего не пересчитала.
на ауди А4 1,9TDI 2007г.в. пробовал удалить сажевик. правленую прогой прошивку сравнил с реально рабочей прошивкой. кое что было изменено,но вроде как затерла всю маску ошибок.
Opel Corsa 1.3 CDTI блок марелли сажу не делает. Маску трет,и еще что-то… но проблему не решает. Через 500 метров авто в аварийке. Маску восстановил — ошибка про дифф давлению. Если снять датчик, то аварийка сразу.
AUTOCHIP удаление и отключение лямбда зонда в Москве прошивка чип тюнинг
После замены катализатора на пламегаситель наличие лямбда-зонда как детали, обеспечивающей в числе прочего качественную работу катализатора, становится не важным. Поэтому часто возникает вопрос: можно ли эксплуатировать автомобиль совсем без лямбда-зонда? Здесь одного решения для всех нет. Наиболее просто и правильно эта задача решается в том случае, если у данного автомобиля предусмотрена возможность перепрограммирования блока управления на режим работы без катализатора, как, например, у большинства BMW. В этом случае после удаления катализатора меняется программа управления и лямбда-зонд просто снимается. У некоторых марок автомобилей перепрограммирование невозможно, и, если неисправность датчика сильно влияет на работу мотора, тогда выхода нет – должен стоять исправный датчик. Также у многих автомобилей неисправность или отсутствие лямбда-зонда практически не сказывается ни на динамике, ни на расходе топлива.
Поэтому часто возникает вопрос: можно ли эксплуатировать автомобиль совсем без лямбда-зонда? Здесь одного решения для всех нет. Наиболее просто и правильно эта задача решается в том случае, если у данного автомобиля предусмотрена возможность перепрограммирования блока управления на режим работы без катализатора, как, например, у большинства BMW. В этом случае после удаления катализатора меняется программа управления и лямбда-зонд просто снимается. У некоторых марок автомобилей перепрограммирование невозможно, и, если неисправность датчика сильно влияет на работу мотора, тогда выхода нет – должен стоять исправный датчик. Также у многих автомобилей неисправность или отсутствие лямбда-зонда практически не сказывается ни на динамике, ни на расходе топлива.
Варианты решения по блокировке контроля катализатора и отключения второго датчика кислорода ;
- Установка механической обманки с эмулятором катализатора на датчик кислорода в случае если сам датчик исправен , минимальная цена !
- Установка электронной обманки второго кислородного датчика если датчик не исправен или нормы токсичности не превышают Евро4 ( широкополосные датчики с контролем неисправности катализатора , температуры катализатора итд)
- Программное удаление второго датчика кислорода ! Ели даже сам датчик исправен — для версий Евро4 Евро5 ! Перевод на Евро2 без контроля катализатора и Контроля второго датчика ! Полностью исключает возможность появление неисправностей связанных с катализатором и вторым кислородным датчиком . Для версий Евро5 возможно только программное удаление контроля катализатора и кислородного датчика !!!
 Для версий Евро5 возможно только программное удаление контроля катализатора и кислородного датчика !!!
Для версий Евро5 возможно только программное удаление контроля катализатора и кислородного датчика !!!
В нашем сервисе вы сможете произвести полное удаление катализатора , сажевого фильтра ,ЕГР итд , звоните мы поможем вам с решением проблем в выхлопной системе !
Как отключить лямбду своими руками – Защита имущества
В современном автомобиле достаточно много различных датчиков, о предназначении которых многие водители не знают. Поэтому, вопрос, что будет, если отключить лямбда зонд не является редким. Это датчик довольно мудреный, в отличие от прибора, контролирующего положение коленвала, а также других схожих датчиков. Лямбда зонд пугает непонятным названием. Вот поэтому, многие автолюбители и считают этот датчик полностью бесполезным, другие считают его источником всех бед. Попробуем разобраться, кто прав по отношению к этому зонду. Ведь на самом деле, это очень важная деталь, только она должна быть гарантированно исправной.
Содержание
Как это работает?
Что будет, если отключить лямбда зонд? Перед тем, как ответить на этот вопрос, нужно разобраться, как он работает. Основная функция, это контроль за работой катализатора. Более точно предназначение зависит от расположения этого датчика. Самым распространенным вариантом является установка зонда перед катализатором. В таком случае, он контролирует количество кислорода в смеси.
Основная функция, это контроль за работой катализатора. Более точно предназначение зависит от расположения этого датчика. Самым распространенным вариантом является установка зонда перед катализатором. В таком случае, он контролирует количество кислорода в смеси.
При необходимости он подает сигнал блоку управления, принуждая увеличить или уменьшить количество кислорода в смеси. Также, часто устанавливают лямбда зонд после катализатора. В таком случае, он проверяет состав отработанных газов. При высоком уровне токсичных веществ подается сигнал на блок управления. Как результат, загорается «чек», при компьютерной диагностике можно считать ошибку неисправности катализатора.
Называется этот датчик по греческой букве ? (лямбда). Именно так в физике обозначается отношение объема кислорода к основной массе топлива в составе горючей смеси. Нормальным считается показатель ?=14,7 на единицу топлива. Если этот показатель окажется ниже или меньше, датчик дает команду на блок управления для изменения соотношения.
Разновидности датчиков
Все зонды полностью одинаковы по принципу действия. Все различия заключаются в особенностях подключения электропитания. На практике, обычно различают их по количеству проводов, которые подключаются к зонду. Наиболее распространены двух- и трехконтактные датчики. Также существуют варианты с подогревом и без него. Датчики с подогревом более эффективны при запуске двигателя в зимнее время, они показывают более качественный результат.
При необходимости, оба типа зондов взаимозаменяемы. Также можно устанавливать датчик от любого автомобиля, даже с другим количеством проводов. Только в таком случае придется повозиться с подключением.
Можно ли ездить без этого датчика?
На самом деле, в большей части случаев автомобиль при отказе лямбда зонда можно эксплуатировать, только на некоторых моделях при отказе невозможно будет завести двигатель. Тут возникает другой вопрос, насколько это будет эффективно и полезно. Первым признаком отказа является повышенный расход топлива. Связано это с неправильной реакцией блока управления на текущую ситуацию. Также, обычно машина начинает «тупить», это также является следствием проблем с зондом (см. статью «Почему машина тупит при разгоне»).
Первым признаком отказа является повышенный расход топлива. Связано это с неправильной реакцией блока управления на текущую ситуацию. Также, обычно машина начинает «тупить», это также является следствием проблем с зондом (см. статью «Почему машина тупит при разгоне»).
Как видите, ездить на машине в большей части случаев можно. Но, при этом, придется смириться с повышенным расходом топлива. Также, езда на автомобиле оказывается довольно затруднительной из-за низкой приемистости. Если отключить исправный зонд, то возникнут проблемы с работой двигателя. На отключение неисправного датчика машина не отреагирует.
Диагностика
Зачастую, за отказ лямбда-зонда принимают совершенно другие поломки. Поэтому, перед покупкой нового датчика (стоит он немало), обязательно стоит провести диагностику. Наиболее оптимальным вариантом является использование диагностического сканера. Компьютер обычно показывает, есть ли ошибка лямбда зонда. В некоторых случаях имеется комплекс проблем, помимо кислородного датчика отказывают и некоторые другие части автомобиля.
Существует также «колхозный» метод диагностики. Заключается он в отключении датчика и проверке, как автомобиль будет работать без него. Считается, что при исправном зонде его отключение повлечет за собой ухудшение работы двигателя, или невозможность его завести. При неисправном датчике изменений не возникнет. К сожалению, такой способ диагностики не всегда надежен, лучше провести компьютерную диагностику.
- Как обмануть лямбда-зонд?
- Механический тип обманки
- Электронный тип обманки
- Перепрошивка
На сегодняшний день качество отечественного бензина оставляет желать лучшего. Все те примеси, что очень часто добавляются, приводят к ряду поломок и нарушений. И одной из основных поломок является нарушение работы лямбда-зонда или катализатора. А замена катализатора обходится автолюбителям в кругленькую сумму, что приводит к тому, что они частенько сами выбивают керамический катализатор. Но это приводит к другой проблеме – появляется сигнал Check Engine на приборной доске, что сигнализирует об отсутствии катализатора.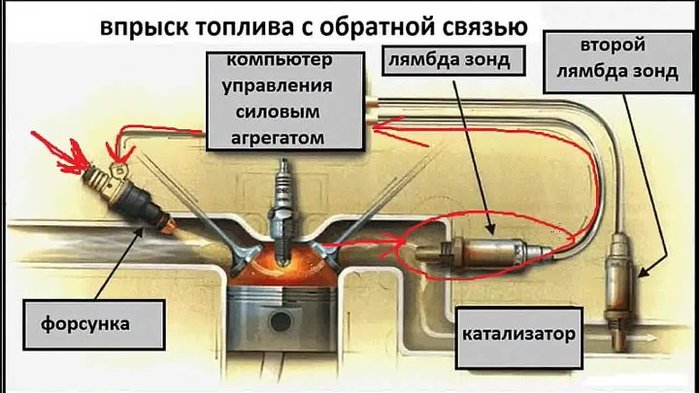 Очень многих эта лампочка раздражает и даже отвлекает внимание водителей, что может привести к печальным результатам.
Очень многих эта лампочка раздражает и даже отвлекает внимание водителей, что может привести к печальным результатам.
Но очень часто автолюбители и сами допускают ошибки, приводящие к поломке датчиков. Вот пример наиболее распространенных:
1. Использование топлива, марка которого не соответствует двигателю;
2. При креплении датчиков, использование герметиков, в состав которых входит силикон; или же таких, которые снижают свою пластичность при комнатной температуре;
3. Многократные неудачные запуски двигателя за короткий промежуток времени;
Если же автомобиль более старый, то датчик, как правило, установлен всего лишь один. Находится он перед катализатором. Это интересно: самым первым кислородным датчиком была деталь, которая представляла собой очень чувствительный элемент, не оборудованный подогревателем. Он нагревался от выхлопных газов, а потому данный процесс требовал времени.
Одним из решений данной проблемы является обманка лямбда-зонда, которую можно сделать своими руками, и стоить это будет дешевле, нежели покупать новый датчик.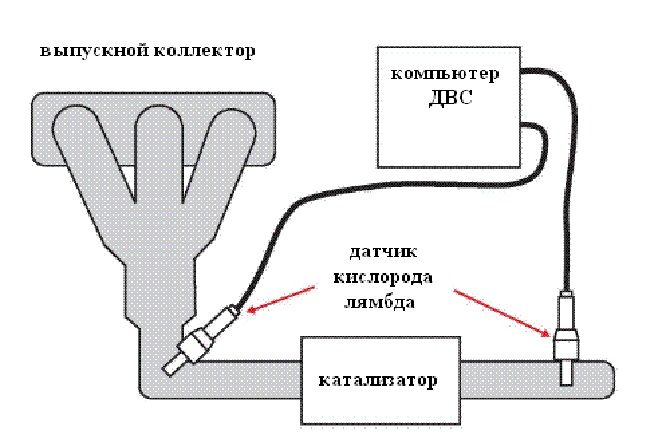 Всего существует три типа обманки лямбда-зонда:
Всего существует три типа обманки лямбда-зонда:
Механический тип обманки
Если вы выбрали механический тип обманки, то вместо катализатора устанавливается так называемая «проставка», или, как еще ее называют, – втулка. Размещают ее между выхлопной трубой и датчиком. Размер этой детали, как вы можете видеть на чертеже обманки лямбда-зонда, строго определенный, а выполнена она из бронзы либо теплоустойчивой стали.
В проставке просверливается небольшое отверстие диаметром 2 мм, через которое выхлопные газы и будут попадать в проставку. Внутрь проставки помещают крошку из керамики, которую предварительно покрывают каталитическим слоем. В результате взаимодействия выхлопных газов с крошкой из керамики происходит окисление, что приводит к снижению концентрации вредных веществ на выходе. Это приведет к тому, что данные с обоих датчиков будут разными, и блок управления примет это за штатную работу катализатора.
Для того чтобы самостоятельно установить проставку, нужно выполнить несколько нехитрых действий. Нужно загнать машину на яму/эстакаду и отключить минусовую клемму. Потом находим датчик и выкручиваем его. Далее подключаем минусовую клемму и запускаем двигатель. Если после этого электронный блок управления выдает ошибку – снова повторяем процедуру. Данный вариант обманки является наиболее экономным.
Нужно загнать машину на яму/эстакаду и отключить минусовую клемму. Потом находим датчик и выкручиваем его. Далее подключаем минусовую клемму и запускаем двигатель. Если после этого электронный блок управления выдает ошибку – снова повторяем процедуру. Данный вариант обманки является наиболее экономным.
Такой тип обманки отлично подходит для всех автомобилей: как отечественных, так и импортных. Это интересно: согласно исследованиям британской страховой компании Churchill, прямоточный глушитель повышает мощность авто в среднем на 5%, но при этом ухудшает слух водителя за год интенсивной эксплуатации авто на 2-3%.
Электронный тип обманки
Сделать обманку электронного типа уже значительно сложнее. Наиболее продвинутые автолюбители самостоятельно паяют схему и делают обманку при помощи одного резистора либо одного конденсатора. Для наиболее простой электронной обманки вам понадобится:
– конденсатор (неполярный) К10-17Б имп., емкостью 1мкФ Y5V, +/-20%,1206 (Номенклатурный номер: 759300515)
– резистор (сопротивление) С1-4имп. 0,25 Вт, 5% 1 Мом (Номенклатурный номер: 51741)
0,25 Вт, 5% 1 Мом (Номенклатурный номер: 51741)
Что будет, если отключить лямбда-зонд в автомобиле?
Автомобили в наше время оснащаются большим количеством электронных устройств и датчиков, без которых уже невозможно обойтись. Сегодня будет идти речь о датчике кислорода или лямбда-зонде. Вы узнаете, как он работает и что будет, если отключить его в случае выхода из строя.
Уже само название этого датчика многим непонятно. Рассмотрим детальнее назначение датчика кислорода, что поможет понять, можно ли эксплуатировать автомобиль без него.
Принцип работы
Лямбда-зонд помогает оптимизировать состав топливовоздушной смеси, необходимой для работы двигателя. В идеале эта смесь должна состоять из 1 части бензина и 14,6-14,8 части воздуха. Для этого электронный блок управления анализирует показатели разных датчиков, среди которых и наш лямбда-зонд.
Этот датчик замеряет количество остаточного кислорода в выхлопных газах. В связи с этим лямбда-зонд устанавливается после выпускного коллектора или в нём, но перед каталитическим нейтрализатором. На некоторых автомобилях после катализатора устанавливается ещё один аналогичный датчик. Он необходим для получения ещё более точного результата, а также проверки функциональности каталитического нейтрализатора.
На некоторых автомобилях после катализатора устанавливается ещё один аналогичный датчик. Он необходим для получения ещё более точного результата, а также проверки функциональности каталитического нейтрализатора.
Проверка лямбда-зонда
Если компьютер получает неправильные данные с кислородного датчика, на панели приборов загорается индикатор Check Engine. При считывании ошибок диагностика может показать неисправность лямбда-зонда. Но не всегда всё настолько однозначно. Иногда датчик показывает неверные значения, так как в двигатель попадает слишком много воздуха или бензина. Виновником может быть банальный подсос воздуха (кстати, мы писали о том, как его искать и устранять – https://avtopub.com/kak-najti-podsos-vozduxa-v-dvigatele-i-ustranit-ego/).
Один из простейших способов проверки – отключение лямбда-зонда и проверка поведения автомобиля во время движения. Если датчик работает нормально, его отключение приведет к ухудшению динамики и значительному росту расхода топлива. Если же датчик неисправен, всё будет, как и раньше.
Подробная статья о том, как проверить датчик кислорода (лямбда-зонд) мультиметром – https://avtopub.com/proverka-lyambda-zonda-datchika-kisloroda-multimetrom/
Можно ли отключить лямбда-зонд и ездить без него?
Отметим, что этот вопрос зачастую возникает потому, что датчик кислорода – запчасть недешевая. Необходимо просто всё взвесить и проанализировать целесообразность такой «экономии». Вы уже знаете, что эксплуатация автомобиля без датчика кислорода обязательно приводит к существенному увеличению расхода бензина. Причина состоит в том, что электронный блок управления в такой ситуации переходит в аварийный режим, регулируя состав смеси по средним показателям. Также автомобиль будет «тупить», поэтому вы будете сильнее давить на газ.
В результате всего этого сэкономить явно не удастся. Очень быстро вы потратите на топливо деньги, которые лучше использовать для покупки нового лямбда-зонда. Конечно, иногда приобрести новый датчик просто нет возможности. В таких случаях некоторое время можно ездить и без него.
Причины выхода из строя датчика и обманки
Лямбда-зонд, как и все детали автомобиля, имеет определенный срок службы. Но ускорить его износ может использование некачественного топлива. Кроме этого, его расположение внизу автомобиля делает датчик кислорода уязвимым к механическим повреждениям. Нередки случаи повреждения проводки или разъема датчика.
Некоторые водители вместо лямбда-зонда устанавливают так называемые «обманки». Эти устройства отличаются более низкой ценой и передают информацию на электронный блок управления двигателем. В результате этого улучшается работа двигателя, а ошибки при диагностике отсутствуют.
Lambda функционирует как цели — Elastic Load Balancing
Вы можете зарегистрировать свои лямбда-функции в качестве целей и настроить правило прослушивателя. для перенаправления запросов целевой группе для вашей лямбда-функции. Когда нагрузка балансировщик перенаправляет запрос целевой группе с помощью функции Lambda в качестве target, он вызывает вашу лямбда-функцию и передает содержимое запроса в лямбда-функция в формате JSON.
Пределы
Лямбда-функция и целевая группа должны находиться в одной учетной записи и в тот же регион.
Максимальный размер тела запроса, который вы можете отправить в лямбда-функцию, составляет 1 МБ. Связанные ограничения размера см. В разделе ограничения заголовка HTTP.
Максимальный размер ответа JSON, который может отправить лямбда-функция, составляет 1 МБ.
WebSockets не поддерживаются. Запросы на обновление отклоняются кодом HTTP 400.
Для демонстрации см. Целевое значение лямбда-выражения в Application Load Balancer.
Подготовьте лямбда-функцию
Следующие рекомендации применимы, если вы используете лямбда-функцию с Балансировщик нагрузки приложений.
Разрешения на вызов лямбда-функции
Если вы создадите целевую группу и зарегистрируете функцию Lambda с помощью AWS Management
Приставка,
консоль добавляет необходимые разрешения в вашу политику функции лямбда от вашего имени.В противном случае после создания целевой группы и регистрации функции с помощью AWS
CLI,
вы должны использовать разрешение на добавление
, чтобы предоставить разрешение Elastic Load Balancing для вызова вашей лямбда-функции.
Мы рекомендуем вам
включить параметр --source-arn , чтобы ограничить вызов функции
указанная целевая группа.
aws лямбда-разрешение на добавление \
--function-name lambda-function-arn-with-alias-name \
--statement-id elb1 \
--principal elasticloadbalancing.amazonaws.com \
--action lambda: InvokeFunction \
--source-arn target-group-arn Управление версиями лямбда-функции
Вы можете зарегистрировать одну лямбда-функцию для каждой целевой группы.Чтобы убедиться, что вы можете изменить ваша функция Lambda и что балансировщик нагрузки всегда вызывает текущую версию из лямбда-функцию, создайте псевдоним функции и включите псевдоним в функцию ARN когда вы регистрируете лямбда-функцию в балансировщике нагрузки. Для дополнительной информации, увидеть Управление версиями и псевдонимами функций AWS Lambda и смещение трафика с использованием псевдонимов в Руководстве разработчика AWS Lambda .
Тайм-аут функции
Балансировщик нагрузки ждет, пока ваша лямбда-функция не ответит или не истечет время ожидания. Мы рекомендуем что вы настраиваете тайм-аут лямбда-функции в зависимости от ожидаемого времени выполнения.Для получения информации о значении тайм-аута по умолчанию и о том, как его изменить, см. Базовая конфигурация функции AWS Lambda. Для получения информации о максимальном значении тайм-аута, которое вы можете настроить, см. Ограничения AWS Lambda.
Создайте целевую группу для лямбда-функции
Создайте целевую группу, которая будет использоваться при маршрутизации запросов.Если содержание запроса совпадает а правило прослушивателя с действием для пересылки его в эту целевую группу, балансировщик нагрузки призывает зарегистрированная лямбда-функция.
- Новая консоль
Для создания целевой группы и регистрации лямбда-функции с помощью новой консоли
Откройте консоль Amazon EC2 на https: // console.aws.amazon.com/ec2/.
На панели навигации в разделе БАЛАНСИРОВКА НАГРУЗКИ выберите Целевые группы .
Выберите Создать целевую группу .
Для Выберите тип цели , выберите Лямбда-функция .
Для Имя целевой группы введите имя целевой группы.
(Необязательно) Чтобы включить проверки работоспособности, выберите Включить в Проверки здоровья раздел.
(Необязательно) Добавьте один или несколько тегов, как показано ниже:
Разверните раздел Теги .
Выберите Добавьте тег .
Введите ключ тега и значение тега.
Выбрать Далее .
Укажите одну лямбда-функцию или пропустите этот шаг и укажите лямбда-функцию позже.
Выберите Создать целевую группу .
- Старая консоль
Для создания целевой группы и регистрации лямбда-функции с помощью старой консоли
Откройте консоль Amazon EC2 на https: // console.aws.amazon.com/ec2/.
На панели навигации в разделе БАЛАНСИРОВКА НАГРУЗКИ выберите Целевые группы .
Выберите Создать целевую группу .
Для Имя целевой группы введите имя целевой группы.
Для Тип цели выберите Лямбда-функция .
Для Лямбда-функция выполните одно из следующих действий:
Выберите лямбда-функцию
Создайте новую лямбда-функцию и выберите ее
Зарегистрируйте лямбда-функцию после создания целевой группы
(Необязательно) Чтобы включить проверки работоспособности, выберите Проверка работоспособности , Включить .
Выберите Создать .
Чтобы создать целевую группу и отменить регистрацию функции Lambda с помощью интерфейса командной строки AWS
Используйте команду create-target-group и регистр целей команды.
Получать события от балансировщика нагрузки
Балансировщик нагрузки поддерживает лямбда-вызов для запросов по HTTP и HTTPS.
Балансировщик нагрузки отправляет событие в формате JSON. Балансировщик нагрузки добавляет следующее
заголовки
на любой запрос: X-Amzn-Trace-Id , X-Forwarded-For , X-Forwarded-Port и X-Forwarded-Proto .
Если присутствует заголовок content-encoding , балансировщик нагрузки Base64
кодирует тело и устанавливает isBase64Encoded в true .
Если заголовок content-encoding отсутствует, используется кодировка Base64
зависит от типа контента.Для следующих типов балансировщик нагрузки отправляет
тело как есть и устанавливает isBase64Encoded в false :
текст / *, приложение / json, приложение / javascript и приложение / xml. В противном случае,
балансировщик нагрузки Base64 кодирует тело и устанавливает isBase64Encoded до правда .
Ниже приводится пример события.
{
"requestContext": {
"elb": {
"targetGroupArn": "arn: aws: elasticloadbalancing: region : 123456789012 : targetgroup / my-target-group / 6d0ecf831eec9f09 "
}
},
"httpMethod": "ПОЛУЧИТЬ",
"путь": "/",
"queryStringParameters": { параметров },
"заголовки": {
«принять»: «текст / html, приложение / xhtml + xml»,
"accept-language": " en-US , en; q = 0.8 ",
"тип-содержимого": "текст / обычный",
"cookie": " cookie ",
"host": " lambda-846800462-us-east-2.elb.amazonaws.com ",
"user-agent": " Mozilla / 5.0 (Macintosh; Intel Mac OS X 10_11_6) ",
"x-amzn-trace-id": " Корень = 1-5bdb40ca-556d8b0c50dc66f0511bf520 ",
"x-forwarded-for": " 72.21.198.66 ",
"x-forwarded-port": " 443 ",
"x-forwarded-proto": " https "
},
"isBase64Encoded": ложь ,
"body": " request_body "
}
Ответить на балансировщик нагрузки
Ответ вашей лямбда-функции должен включать кодировку Base64. статус, код состояния и заголовки.Вы можете опустить тело.
Чтобы включить двоичное содержимое в тело ответа, вы должны кодировать Base64
content и установите isBase64Encoded на true . Балансировщик нагрузки
декодирует содержимое для получения двоичного содержимого и отправляет его клиенту в
тело ответа HTTP.
Балансировщик нагрузки не учитывает пошаговые заголовки, такие как Connection или Кодирование передачи . Вы можете опустить заголовок Content-Length потому что балансировщик нагрузки вычисляет его перед отправкой ответов клиентам.
Ниже приведен пример ответа от лямбда-функции.
{
"isBase64Encoded": ложь ,
"statusCode": 200 ,
"statusDescription": " 200 ОК ",
"заголовки": {
"Set-cookie": " cookies ",
"Content-Type": "application / json"
},
"body": "Привет от Lambda (необязательно)"
} Шаблоны функций Lambda, которые работают с балансировщиками нагрузки приложений, см. В разделе application-load-balancer-serverless-app на github.Или откройте Лямбда-консоль, создайте функцию и выберите один из следующих вариантов в репозитории бессерверных приложений AWS:
ALB-Lambda-Target-HelloWorld
ALB-Lambda-Target-UploadFiletoS3
ALB-Lambda-Target-BinaryResponse
ALB-лямбда-цель-WhatisMyIP
Если запросы от клиента или ответы от лямбда-функции содержат заголовки с несколькими значениями или содержит один и тот же заголовок несколько раз, или запрос параметры с несколькими значениями для одного и того же ключа, вы можете включить поддержку синтаксис многозначного заголовка.После включения многозначных заголовков заголовки и параметры запроса, которыми обмениваются балансировщик нагрузки и лямбда-функция используйте массивы вместо строк. Если вы не включили синтаксис многозначного заголовка и параметр заголовка или запроса имеет несколько значений, балансировщик нагрузки использует последнее значение, которое он получает.
Имена полей, используемых для заголовков и параметров строки запроса, различаются. в зависимости от того, включаете ли вы многозначные заголовки для целевой группы.
Следующий пример запроса имеет два параметра запроса с одним и тем же ключом:
http://www.example.com?&myKey=val1&myKey=val2 В формате по умолчанию балансировщик нагрузки использует последнее значение, отправленное клиентом.
и отправляет вам событие, которое включает параметры строки запроса, используя Параметры queryString .Например:
"queryStringParameters": {"myKey": "val2"}, Если вы включаете многозначные заголовки, балансировщик нагрузки использует оба отправленных значения ключа.
клиентом и отправляет вам событие, которое включает параметры строки запроса, используя Параметры multiValueQueryStringParameters .Например:
"multiValueQueryStringParameters": {"myKey": ["val1", "val2"]}, Аналогичным образом предположим, что клиент отправляет запрос с двумя файлами cookie в заголовке:
"cookie": "имя1 = значение1",
"cookie": "имя2 = значение2", В формате по умолчанию балансировщик нагрузки использует последний файл cookie, отправленный клиентом.
и отправляет вам событие, которое включает заголовки с использованием заголовков .Например:
"заголовки": {
"cookie": "имя2 = значение2",
...
}, Если вы включаете многозначные заголовки, балансировщик нагрузки использует оба файла cookie, отправленные
клиент
и отправляет вам событие, которое включает заголовки с использованием multiValueHeaders .
Например:
"multiValueHeaders": {
"cookie": ["имя1 = значение1", "имя2 = значение2"],
...
}, Если параметры запроса закодированы в URL-адресе, балансировщик нагрузки не декодирует их. Вы должен расшифруйте их в своей лямбда-функции.
Имена полей, используемых для заголовков, различаются в зависимости от того,
вы включаете многозначные заголовки для целевой группы.Вы должны использовать multiValueHeaders , если вы включили многозначные заголовки
и заголовки в противном случае.
В формате по умолчанию вы можете указать один файл cookie:
{
"заголовки": {
"Set-cookie": "cookie-name = cookie-value; Domain = myweb.com; Secure; HttpOnly ",
"Content-Type": "application / json"
},
} Если вы включаете многозначные заголовки, вы должны указать несколько файлов cookie следующим образом:
{
"multiValueHeaders": {
"Set-cookie": ["cookie-name = cookie-value; Domain = myweb.com; Secure; HttpOnly", "cookie-name = cookie-value; Expires = 8 мая 2019 г."],
"Content-Type": ["application / json"]
},
} Вы можете включить или отключить многозначные заголовки для целевой группы с помощью
тип цели лямбда .
- Новая консоль
Для включения многозначных заголовков с помощью новой консоли
Откройте консоль Amazon EC2 на https: // console.aws.amazon.com/ec2/.
На панели навигации в разделе БАЛАНСИРОВКА НАГРУЗКИ выберите Целевые группы .
Выберите имя целевой группы, чтобы открыть страницу сведений о ней.
На вкладке Сведения о группе , в атрибутах В разделе выберите Edit .
Установите или снимите Заголовки нескольких значений .
Выбрать Сохранить изменения .
- Старая консоль
Для включения многозначных заголовков с помощью старой консоли
Откройте консоль Amazon EC2 на https: // console.aws.amazon.com/ec2/.
На панели навигации в разделе БАЛАНСИРОВКА НАГРУЗКИ выберите Целевые группы .
Выберите вашу целевую группу.
На вкладке Описание выберите Изменить атрибуты .
Для Заголовки нескольких значений выберите Включить .
Выберите Сохранить .
Для включения многозначных заголовков с помощью интерфейса командной строки AWS
Используйте атрибуты модификации целевой группы
команда с лямбдой .multi_value_headers.enabled атрибут .
Включить проверки работоспособности
По умолчанию проверки работоспособности отключены для целевых групп типа лямбда .
Вы можете включить проверки работоспособности, чтобы реализовать отказоустойчивость DNS с помощью Amazon Route 53.В
Лямбда-функция может проверять работоспособность нижестоящей службы, прежде чем отвечать на
запрос проверки работоспособности. Если ответ от лямбда-функции указывает на работоспособность
ошибка проверки, ошибка проверки работоспособности передается на Route 53. Вы можете настроить Route 53
для переключения на стек приложений резервного копирования.
С вас взимается плата за проверки работоспособности, как и за любой вызов лямбда-функции.
Ниже приведен формат события проверки работоспособности, отправляемого вашей лямбда-функции.
Чтобы проверить, является ли событие событием проверки работоспособности, проверьте значение user-agent
поле.Пользовательский агент для проверок работоспособности — ELB-HealthChecker / 2.0 .
{
"requestContext": {
"elb": {
"targetGroupArn": "arn: aws: elasticloadbalancing: region : 123456789012 : targetgroup / my-target-group / 6d0ecf831eec9f09 "
}
},
"httpMethod": "ПОЛУЧИТЬ",
"путь": "/",
"queryStringParameters": {},
"заголовки": {
"пользовательский агент": "ELB-HealthChecker / 2.0 "
},
"тело": "",
"isBase64Encoded": ложь
} - Новая консоль
Для включения проверки работоспособности целевой группы с помощью новой консоли
Откройте консоль Amazon EC2 на https: // console.aws.amazon.com/ec2/.
На панели навигации в разделе БАЛАНСИРОВКА НАГРУЗКИ выберите Целевые группы .
Выберите имя целевой группы, чтобы открыть страницу сведений о ней.
На вкладке Сведения о группе в проверке работоспособности В разделе настроек выберите Редактировать .
Для Проверок работоспособности выберите Включить .
Выбрать Сохранить изменения .
- Старая консоль
Для включения проверки работоспособности целевой группы с помощью старой консоли
Лучшее соотношение цены и качества лямбда-зонда к — Отличные предложения по лямбда-зонду от глобального лямбда-зонда к продавцам
Отличные новости !!! Вы попали в нужное место для лямбда-зонда.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, так как этот лучший лямбда-зонд в кратчайшие сроки станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что у вас есть лямбда-зонд на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще сомневаетесь в выборе лямбда-зонда и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести лямбда-зонд по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
zprobe [Smoothieware]
Зонд — это переключатель (очень похожий на конечный выключатель), используемый для автоматического определения местоположения объекта.
Смузи будет использовать его, чтобы двигаться, пока датчик не «сработает», и остановится на этом.
Его можно использовать на фрезерных станках с ЧПУ для:
Его можно использовать на 3D-принтерах для:
Найдите точку касания между приводом и станиной
Выполните выравнивание грядки по сетке для компенсации неровностей высоты грядки
Разные стратегии полезны для машин разной геометрии, нажмите на одну, чтобы перейти к ней:
ПРИМЕЧАНИЕ Когда G30 сохраняет положение датчика или распечатывает значение, оно выражается в исполнительных единицах, не обязательно в мм.Это проблема только для дельт вращения, где единицы привода имеют градусы, а не миллиметры. В большинстве других конфигураций это будет мм.
Выдвижной зонд с сервоуправлением
Выдвижной датчик позволяет датчику не мешать пластику, когда он не используется.
Вам понадобится датчик-переключатель, прикрепленный к приводу машины, или станина, способная активировать входной сигнал концевого упора, когда хотэнд касается его. Обнаружение точки лучше всего, так как фактическое положение важно для зондирования.(бесконтактные датчики неоптимальны, так как не определяют положение точки).
Начало отсчета
Измерительный щуп не является концевым упором и поэтому не может использоваться для возврата в исходное положение по оси Z. Вам нужен упор Z, чтобы использовать G28 для установки оси Z в исходное положение. Ниже приведены некоторые инструкции о том, как установить высоту станины по оси Z с помощью датчика (G30).ПРИМЕЧАНИЕ , что gamma_max в конфигурации конечного упора IS используется для установки максимального хода по умолчанию для команды датчика (G30). ТОЛЬКО ЕСЛИ zprobe.max_z не определен.
Еще немного: у вас есть два варианта:
Настройте датчик как конечный упор (в модуле конечного упора), и в этом случае вы можете использовать G28 для поиска кровати, но вы не можете использовать его в модуле zprobe
Сконфигурируйте свой датчик как датчик (в модуле датчика), и в этом случае вы не можете использовать его с G28 (модуль конечного останова) для поиска кровати, , но вы можете использовать его с G30 для поиска кровати, и вы можете использовать его с G31 / G32 и т.д. для выравнивания / калибровки (это, вероятно, то, что вы хотите сделать).
Дело в том, что вы настраиваете датчик как * либо * датчик, либо как конечный упор, , а не как одновременно. Вы по-прежнему можете использовать его как для выравнивания / калибровки *, так и * поиска кровати, просто если это датчик (а не конечный упор), вы используете другой Gcode (G30), чем если бы это был конечный упор (G28).
Вот таблица распространенных типов датчиков с их плюсами и минусами, а также наши советы.
| Тип | Использует | Плюсы | Минусы | Наш рейтинг | Совет |
|---|---|---|---|---|---|
| Механический переключатель | Концевые упоры, выдвижные Z-зонды | Дешевый, очень прочный, очень точный / повторяемый | Нет | Это самый простой, а также лучший датчик.Не используйте больше ничего, если у вас нет на то веской причины. Просто приобретите более изящный датчик, потому что это круто, скорее всего, он быстро укусит вас в спину | |
| Оптический переключатель | Концевые упоры, выдвижные Z-зонды | Дешевый, прочный, очень точный / повторяемый | Пыль через некоторое время может блокировать световой путь | В большинстве случаев может использоваться вместо механических переключателей, имеет аналогичный преимущества и не производит никакого звука. | |
| Эффект Холла | Концевые упоры, датчик постели | Достаточно дешевый, бесконтактный, переменная точность / повторяемость | Требуются магниты, которые накапливают металлическую пыль из окружающей среды, могут не иметь повторяемости | Хороший бесконтактный вариант, если контакт является проблема в вашей настройке | |
| Индуктивная | Концевые упоры, датчик кровати | Бесконтактный | Дорогой, трудно подсоединяемый, нестандартная повторяемость, требуется 24-36 В, требуется конечная входная защита (делитель напряжения) | Вы, вероятно, не должны использовать их, если вы не иметь очень вескую причину | |
| Емкостный | Концевые упоры, датчик кровати | Бесконтактный, может использоваться со стеклянной платформой | Дорогой, трудно подсоединяемый, нестандартная воспроизводимость, требуется 24-36 В, требуется концевая защита входа (делитель напряжения) | Вы, наверное, не следует использовать их, если у вас нет веской причины | |
| Силовой резистор (FSR) | Зонд для кровати | Может использоваться под стеклянной кроватью, бесконтактно, может быть очень надежным при правильной настройке | Трудно правильно настроить, привередливо, дорого, аналоговое значение требуется адаптер, более сложный для подключения | Вы, вероятно, не должны использовать их, если у вас нет очень веской причины | |
| ИК-зонды | Зонд Z, зонд для кровати | Бесконтактный | Дорогой, аналоговый, то есть требует адаптера, ужасная повторяемость / точность, сложнее подключить | Вероятно, вы не должны использовать их, если у вас нет очень веская причина | |
| Bltouch | Выдвижные Z-зонды | Дешевые, очень прочные, очень точные / повторяемые, выдвижные (эквивалент механического переключателя на сервоприводе) | Нет, кроме дополнительной сложности втягивания | Механические переключатели лучшие датчики на сегодняшний день, но они очень похожи, по сути имитируя сервомеханический переключатель |
На странице Reprap probe также есть информация по этому поводу, которая может оказаться вам полезной.# контактный зонд прикреплен, если NC удаляет!, Azteeg X5 это 1,29 zprobe.slow_feedrate 5 # мм / сек Скорость подачи зонда # zprobe.debounce_ms 1 # установить, если шумно zprobe.fast_feedrate 100 # скорость подачи перемещения zprobe.probe_height 5 # на сколько выше дна запускается зонд NB нужен только для G32 на дельте zprobe.return_feedrate 0 # скорость подачи после датчика, по умолчанию 0 вдвое больше slow_feedrate (мм / с) zprobe.max_z 200 # максимальное перемещение по умолчанию для команды датчика, будет использовать gamma_max, если не определено
Примечание
slow_feedrate — это скорость, с которой зонд движется вниз, чтобы найти пласт, он возвращается (зонд вверх) со скоростью 2 * slow_feedrate или return_feedrate . fast_feedrate используется только для любых перемещений XY, выполняемых во время измерения.Сначала проверьте zprobe с помощью M119 , убедитесь, что датчик равен 1 при срабатывании триггера и 0, когда не срабатывает.
G30 будет зондировать из текущего положения до тех пор, пока он не коснется дна и зонд не сработает, он сообщит пройденное расстояние, а затем вернется туда, где он начал.
G30 Znnn будет зондировать до тех пор, пока он не достигнет слоя, затем установит Z на nnn (выполнив G92 Znnn), это можно использовать для установки высоты сопла, если nnn — это смещение зонда по Z от сопла в направлении Z.
G30 Fxxx будет запускать датчик со скоростью xxx мм / мин, игнорируя slow_feedrate.
G38.2 и G38.3 (для измерения по X и Y) также реализованы, как описано здесь. ПРИМЕЧАНИЕ. измерение по X или Y по дельте не рекомендуется из-за проблем с нелинейным перемещением.
Если выбрано несколько стратегий нивелирования, параметр Pn выберет, на какую из них отправлять коды нивелирования: 0 — первый заданный, 1 — второй и так далее. например, G29 P1 отправит G29 во вторую заданную стратегию нивелирования.
Есть несколько параметров M670, которые могут устанавливать различные настройки для zprobe, переопределяя настройки конфигурации, все они сохраняются в M500.
| M670 S0.50 K2.00 R2.5 | Установка скорости подачи датчика (медленная / быстрая / обратная) (мм / сек) | |||
| M670 Z200.00 | Набор датчиков max_z (мм) | |||
| M670 h3.00 | Установка высоты зонда (мм) | |||
| M670 I1 | Временное изменение положения штифта датчика (не сохраняется с M500) |
Стратегии выравнивания
Если leveling-strategy.xxx.enable имеет значение true , что позволяет использовать одну из описанных ниже стратегий выравнивания грядки.
ПРИМЕЧАНИЕ , что большинство стратегий выравнивания не могут быть запущены из веб-интерфейса, при использовании сети используйте telnet для их запуска или используйте последовательный порт USB.
Варианты конфигурации
| Опция | Пример значения | Пояснение |
|---|
| zprobe.enable | true | Установите значение true, чтобы включить модуль Z-датчика. | Пин, к которому подключен зонд. | |||||
| zprobe.slow_feedrate | 5 | Скорость в миллиметрах / с, с которой зонд ищет поверхность. | ||||||
| zprobe.fast_feedrate | 100 | Скорость в миллиметрах / с, с которой датчик быстро перемещается. | ||||||
| zprobe.return_feedrate | 50 | Скорость в миллиметрах / секунду, с которой датчик возвращается после датчика. | ||||||
| zprobe.debounce_ms | 1 | Ударьте по штырю датчика за это количество миллисекунд. Установите 1 или 2, если ваш зонд слишком шумный и дает ложные показания. | ||||||
| zprobe.probe_height | 5 | Расстояние над слоем, на котором начинается зондирование, если известна высота кровати. | ||||||
| zprobe.max_z | 200 | Максимум Z (было gamma_max) | ||||||
| zprobe.dwell_before_probing | 0,2 | Время выдержки в секундах перед зондированием |
Примечание
При этом калибруются только концевые упоры и дельта-радиус, он предназначен для однократного запуска и выполнения, нет необходимости запускать его перед каждой печатью. Просто запустите его и сохраните результаты. Он не , а устанавливает высоту Z, что можно сделать несколькими способами, как описано ниже.Убедитесь, что в конфигурации установлено значение delta_homing, true и zprobe.max_z установлен примерно на 20-30 мм короче, чем расстояние до кровати, в противном случае он врежется в кровать на высокой скорости.
Также в конфиге установлены:
leveling-strategy.delta-Calibration.enable true # базовая дельта-калибровка leveling-strategy.delta-Calibration.radius 100 # радиус датчика leveling-strategy.delta-Calibration.initial_height 10 # высота над слоем для остановки начального движения # начальная высота над кроватью останавливаем начальное движение вниз после дома, чтобы найти кровать # это должна быть высота, достаточная для того, чтобы зонд не ударился о кровать, и смещение от zprobe.max_z (может быть установлено в 0, если zprobe.max_z учитывает смещение датчика)
Radius
Обратите внимание, что leveling-strategy.delta-Calibration.radius следует оптимально настроить так, чтобы точки измерения находились на окружности окружности, равноудаленной от центра основания до опор.Это сводит к минимуму влияние одного упора на другие при регулировке.
Обычно при этом точки зонда помещаются ближе к краю стеклянной поверхности.
Процедура калибровки
Выполнение команды G32 автоматически запустит полную последовательность калибровки.
Он будет повторяться несколько раз, чтобы получить хороший результат.
Если результат хороший, используйте M500 , чтобы сохранить настройки M666 .
Что произойдет, так это то, что зонд опустится вниз, чтобы найти кровать, затем снова вернется в исходное положение, а затем опустится на 5 мм над кроватью (или что бы вы ни установили для zprobe.probe_height ).
Затем он проверит три башни на указанной leveling-strategy.delta-Calibration.radius от центра и распечатает результаты, он установит обрезки концевых упоров и исходную точку, это будет повторяться 3-4 раза, каждая время, когда разница между тремя датчиками должна стать меньше, если они завершили 4 проверки или разница меньше 0.03 мм он вернется в исходное положение в последний раз, затем измерит три точки, чтобы подтвердить калибровку, а затем измерить центр.
Он также отрегулирует радиус дельты ( M665 Rnnn ), чтобы центр был на той же высоте, что и внешние точки.
Варианты конфигурации
| Опция | Пример значения | Пояснение |
|---|
| leveling-strategy.delta-Calibration.enable | true | Установите значение true, чтобы активировать стратегию выравнивания дельта-калибровки.Он использует зонд для определения наклона самолета и радиуса руки в дельта-машине | ||||
| leveling-strategy.delta-Calibration.radius | 100 | Радиус, на котором измеряется три точки | ||||
| leveling-strategy.delta-Calibration.initial_height | 10 | начальная высота над кроватью, мы останавливаем начальное движение вниз после возвращения домой, чтобы найти кровать. Это должна быть высота, достаточная для того, чтобы зонд не ударился об основание, и абсолютная позиция Z |
Пример конфигурации
Чтобы активировать эту стратегию выравнивания, скопируйте / вставьте следующее в файл конфигурации и отредактируйте его соответствующим образом:
стратегия выравнивания.delta-Calibration.enable true # Установите значение true, чтобы включить стратегию выравнивания дельта-калибровки.
# Это использует зонд для определения наклона самолета и радиуса руки
# в дельта-машине
leveling-strategy.delta-Calibration.radius 100 # Радиус, на котором исследуются три точки
leveling-strategy.delta-Calibration.initial_height 10 # Начальная высота над кроватью, мы останавливаем начальное движение вниз после дома
# найти кровать.Этой высоты должно быть достаточно, чтобы зонд
# не ударится о кровать использует
Это различные способы использования процедуры калибровки:
| G29 | проверит семь точек на вашей кровати, вы можете использовать это, чтобы увидеть, насколько хорошо выровнена кровать. | |||
| G29.1 | будет исследовать семь точек на вашей кровати и выводить данные, которые могут быть введены в некоторые автономные сценарии с наименьшими ошибками для корректировки смещения опор | |||
| G32 | Выполняет полную последовательность калибровки, концевой упор и дельта-радиус | |||
| G32 R0 | Выполняется только калибровка радиуса дельты | |||
| G32 E0 | Выполняется только калибровка концевого выключателя | |||
| G32 I0.02 | Устанавливает цель с точностью до 0,02 мм | |||
| G32 K0 | Сохраняет текущие настройки трима концевого упора и проверяет их, без K триммеры сбрасываются на ноль и выполняется полная калибровка | |||
| G32 J110.0 | для этого сеанса установит радиус датчика на 110,0 мм | |||
| M500 | сохраняет точки измерения | |||
| M503 | отображает текущие настройки |
Пример использования:
G28 (исходный XYZ)
(Отодвиньте Z минимум на 30 мм от кровати, если это не так, и прикрепите датчик, если у вас съемный датчик)
G32 (откалибровать машину)
(Снимите зонд, если у вас съемный зонд)
M500 (для сохранения результатов зондирования)
G28 (исходный XYZ)
(Вручную: бегом вниз, чтобы коснуться пластины)
M306 Z0
M500 (для сохранения смещения начала отсчета)
G28
(Теперь машина откалибрована и знает правильную высоту над кроватью) Z высота
Вам нужно будет установить высоту по оси z после калибровки, используя один из нескольких доступных методов, упомянутых здесь Delta
Смещения
НЕТ смещений датчика для дельта-калибровки, поэтому датчик должен находиться в пределах 10-20 мм от сопла.Это сделано намеренно, поскольку калибровка работает исключительно по относительным позициям.Чтобы было ясно: в Smoothie нет смещений, и они не будут полезны, поскольку калибровка относительна. Это может сбивать с толку пользователей Marlin. Просто используйте это, и вы увидите.
Если вы получаете ошибку Calibration failed to complete или зонд врезается в основание на начальном зонде, это обычно означает, что вам нужно увеличить настройку конфигурации leveling-strategy.delta-Calibration.initial_height до большее значение, попробуйте 10 или 20 или больше.
В последней версии он должен быстро перемещаться чуть выше кровати, а затем медленно двигаться к кровати. Если он ударяется о кровать при первом быстром движении, вам нужно установить начальную высоту больше.
См. Http://minow.blogspot.com/ для получения дополнительных сведений о калибровке дельты.
Карта высот зондирования
Нет ничего идеального
Измеряет точки delta_grid.size по осям X и Y (общий размер датчика * размер) и сохраняет относительные смещения от высоты 0,0 Z.
Если этот параметр включен, при каждом перемещении будет вычисляться смещение по оси Z на основе интерполяции смещения высоты в пределах сетки ближайших 4 точек.
Следует использовать вместе со стратегией дельта-калибровки, описанной выше.
Сначала выполните калибровку с помощью G32, затем, если необходимо, выполните G31 для установки компенсации сетки. Если хотите сохранить сетку, сделайте M374.
Примечание
Для использования только на линейно-дельта-машинах, не использовать для декартовых машин. Дельта-сетка .Указанный радиус должен быть по крайней мере таким же большим, как наибольшая позиция X, Y, которая может быть перемещена. Он становится очень неточным, если вы пытаетесь печатать за пределами указанного вами радиуса.
Примечание
G31 - это команда проверки на этом, а не на G32 .Конфигурация
Стратегия должна быть включена в конфигурации, а также в zprobe.
leveling-strategy.delta-grid.enable true
Радиус станины должен быть указан с помощью…
стратегия выравнивания.delta-grid.radius 50
Он должен быть как минимум равным максимальному радиусу печати, поскольку выход за пределы этого диапазона не будет компенсироваться правильно.
Размер сетки можно установить с помощью…
leveling-strategy.delta-grid.size 7
Это размер сетки по осям X и Y, это должно быть нечетное число, по умолчанию - 7, что соответствует 49 точкам измерения.
leveling-strategy.delta-grid.do_home true
Это должно быть установлено на принтере Delta (хотя по умолчанию должно быть установлено значение true).
Если вы не используете все 3 ограничителя (или предпочитаете вернуться в исходное положение вручную перед G32):
leveling-strategy.delta-grid.do_home false
Примечание
Вы обязаны убедиться, что (0,0) находится в повторяемом месте, если для do_home установлено значение false .Опционально смещения датчика от сопла или головки инструмента могут быть определены с помощью…
leveling-strategy.delta-grid.probe_offsets 0,0,0 # смещения датчика x, y, z (Z всегда должно быть 0)
Их также можно настроить с помощью M565 X0 Y0 Z0.
Примечание
Установка смещений датчика по дельте сделает сетку менее эффективной, чем дальше датчик от головки, это особенно верно, если вы используете его для исправления ошибок геометрии, поскольку они зависят от положения привода, а не от головки позиция.Таким образом, смещение датчика от головки будет пытаться компенсировать ошибки, которые смещены относительно того места, где фактически находится головка.
Нет простого способа решить эту проблему, кроме как расположить зонд как можно ближе к соплу.
Если сохраненная сетка должна быть загружена при загрузке, это должно быть установлено в конфигурации…
leveling-strategy.delta-grid.save true
Затем, когда будет выпущен M500, он сохранит M375, что приведет к загрузке сетки при загрузке. По умолчанию сетка не загружается автоматически при загрузке.
Примечание
Размер сетки и радиус сохраняются в файле и восстанавливаются при загрузке с помощью M375.Если размер сетки отличается от размера в конфигурации, будет загружаться НЕ .Если радиус отличается, тогда радиус будет установлен на то, что было сохранено, вместо того, что было установлено в config.
НЕ вызывайте M375 из файла gcode, так как это вызовет нехватку памяти и сбой системы.
При желании можно установить initial_height, который сообщает начальному датчику, где следует остановить быстрый спуск, до того, как он выполнит исследование, это должно быть примерно на 5-10 мм над слоем.
стратегия-выравнивания.delta-grid.initial_height 10
Варианты конфигурации
| Опция | Пример значения | Пояснение |
|---|
| выравнивание-стратегия.delta-grid.enable | true | Стратегия должна быть включена в конфиге, как и модуль zprobe. | ||||
| leveling-strategy.delta-grid.size | 7 | Размер сетки, например 7, приводит к сетке 7 × 7 с 49 точками. Должно быть нечетное число. | ||||
| leveling-strategy.delta-grid.probe_offsets | 0,0,0 | Дополнительные смещения датчика от сопла или головки инструмента ПРИМЕЧАНИЕ Z должно быть 0 | ||||
| выравнивание-стратегия.delta-grid.save | false | Если сохраненная сетка должна загружаться при загрузке, то это должно быть установлено на true | ||||
| leveling-strategy.delta-grid.initial_height | 10 | При желании можно установить initial_height, который сообщит начальному датчику, где остановить быстрый спуск до его проверки, это должно быть примерно на 5-10 мм выше кровать |
Пример конфигурации
Чтобы активировать эту стратегию выравнивания, скопируйте / вставьте следующее в файл конфигурации и отредактируйте его соответствующим образом:
стратегия выравнивания.delta-grid.enable true # В конфиге должна быть включена стратегия, как и модуль zprobe.
leveling-strategy.delta-grid.radius 50 # Необходимо указать радиус станины. Он должен быть не меньше, чем
# максимальный радиус печати при выходе за его пределы не будет
# получить компенсацию правильно
leveling-strategy.delta-grid.size 7 # Размер сетки, например, 7 вызывает сетку 7x7 с 49 точками.# Должно быть нечетное число.
leveling-strategy.delta-grid.probe_offsets 0,0,0 # Дополнительные смещения датчика от сопла или головки инструмента
leveling-strategy.delta-grid.save false # Если сохраненная сетка должна быть загружена при загрузке, то это должно быть установлено в true
leveling-strategy.delta-grid.initial_height 10 # При желании можно установить initial_height, который сообщает начальному зонду
# где остановить быстрый приличный перед тем, как он проверит, это должно быть
# примерно на 5-10 мм над кроватью Использование
| G29 | тестовые зонды в сетке в пределах радиуса, создавая карту смещений, это может быть импортировано в графическую программу для визуализации слоя (ПРИМЕЧАНИЕ, если дельта-калибровка также включена, то это выполняется с G29 P1 ).необязательные параметры В устанавливает количество точек на значение n, Jn устанавливает радиус для этого зонда. | |||
| G29.1 | тестовые зонды в спиральном шаблоне в пределах радиуса, создавая карту смещений, это может быть импортировано в графическую программу для визуализации высот слоя (ПРИМЕЧАНИЕ, если дельта-калибровка также включена, то это выполняется с G29 P1 ). необязательные параметры В устанавливает количество точек на значение n, Jn устанавливает радиус для этого зонда. | |||
| G31 | проверяет сетку и включает компенсацию, это будет оставаться в силе до сброса или M561 / M370 дополнительных параметров Jn устанавливает радиус для этого датчика. | |||
| M370 | очищает сетку и отключает компенсацию ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M374 | Сохранить сетку в / sd / delta.сетка | |||
| M374.1 | удалить /sd/delta.grid | |||
| M375 | Загрузите сетку из /sd/delta.grid и включите компенсацию ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M375.1 | отображение текущей сетки | |||
| M561 | очищает сетку и отключает компенсацию ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M565 | определяет смещение зонда от сопла или головки инструмента | |||
| M500 | сохраняет точки измерения | |||
| M503 | отображает текущие настройки |
Пример использования:
G28 (исходный XYZ)
(Отодвиньте Z минимум на 30 мм от кровати, если это не так, и прикрепите датчик, если у вас съемный датчик)
G31 (зондировать сетку)
M374 (сохранить сетку на sdcard)
(Снимите зонд, если у вас съемный зонд)
M500 (напишите M375, чтобы переопределить файл для автоматической загрузки сетки, если стратегия выравнивания.delta-grid.save имеет значение true)
G28 (исходный XYZ)
(Вручную: бегом вниз, чтобы коснуться пластины)
M306 Z0
M500 (для сохранения смещения начала отсчета)
G28
(Теперь машина выровнена по сетке и знает правильную высоту над станиной) Также неправильно называется выравнивание грядки.
Не использовать на дельтах
Это просто не сработает. Используйте стратегию, специфичную для дельты, выше.
Следующее руководство пользователя от стороннего производителя полезно
Однако обратите внимание, что НЕ рекомендуется для для автоматизации последовательности зондов в вашем gcode, как предлагается в этом сообщении.
Трехточечное выравнивание
Если ваша тарелка идеально ровная, но не ровная, это все, что вам нужно.
Сводка
Зондирует три указанные пользователем точки на кровати и определяет плоскость кровати относительно зонда.
Когда голова движется по осям X и Y, она будет регулировать Z, чтобы удерживать головной трамвай с платформой.
Примечание
Датчик не устанавливает высоту слоя, датчики находят относительный уровень слоя на основе первой точки датчика, поэтому после того, как вы определили плоскость кровати с помощью G32 , вы затем установите высоту кровати на первую точку датчика и используйте M206 или M306 для установки смещения начала отсчета.После сохранения вам больше не нужно делать zprobe или высоту кровати. В этом случае лучше всего иметь ограничитель Z, а также ZProbe. Концевой упор Z используется для установки высоты станины после зонда.
Это отличается от других прошивок и является преднамеренным.
Это позволяет людям использовать временные датчики Z и не иметь постоянного датчика Z или знать точное смещение датчика по оси Z относительно сопла. Кроме того, компонент z в .probe_offsets всегда должен быть равен нулю.
Примечание
Три точки измерения ДОЛЖНЫ быть тремя углами треугольника, они НЕ ДОЛЖНЫ находиться на прямой линии, иначе математическая система и система координат будут повреждены, и вам нужно будет выполнить сброс.Конфигурация
Стратегия должна быть включена в конфигурации, а также в zprobe.
leveling-strategy.three-point-leveling.enable true
Необходимо определить три точки измерения. Лучше всего, если они будут тремя точками равностороннего треугольника, как можно дальше друг от друга.
Их можно определить в файле конфигурации как: -
leveling-strategy.three-point-leveling.point1 100.0,0.0 # первая точка измерения (x, y) выравнивающая стратегия.three-point-leveling.point2 200.0,200.0 # вторая точка измерения (x, y) leveling-strategy.three-point-leveling.point3 0.0,200.0 # третья точка измерения (x, y)
Или точки измерения могут быть определены (и сохранены с помощью M500 ), используя M557 P0 X30 Y40.5 , где P равно 0,1,2
Смещения зонда от сопла или головки инструмента можно определить с помощью:
leveling-strategy.three-point-leveling.probe_offsets 0,0,0 # смещения датчика x, y, z (Z всегда должно быть 0)
Смещения датчика также могут быть установлены с помощью M565 X0 Y0 Z0
Для принудительного наведения в исходное положение по X и Y до того, как G32 выполнит зонд, в конфигурации можно установить следующее (это значение по умолчанию)
стратегия выравнивания.three-point-leveling.home_first true # отключить, установив false
Допуск датчика можно установить с помощью конфигурации
leveling-strategy.three-point-leveling.tolerance 0,03 # допуск датчика в мм, по умолчанию 0,03 мм
Вы можете сохранить плоскость кровати, чтобы ее можно было использовать снова без повторного зондирования, предполагая, что кровать остается плоской и т. Д., Чтобы сделать это, вы должны включить эту функцию
leveling-strategy.three-point-leveling.save_plane истина #
Для того, чтобы это было эффективно, вы должны привести Z к первой точке измерения, определенной при создании плоскости.Установите нулевую высоту Z в первой точке датчика,
, тогда плоскость основания должна быть относительной с этой точки. Вы сохраняете его с M500 , хотя он не будет отображаться с M503 , поскольку это не настраиваемая пользователем функция.
Варианты конфигурации
| Опция | Пример значения | Пояснение |
|---|
| leveling-strategy.three-point-leveling.enable | true | Установите значение true, чтобы включить стратегию нивелирования, которая исследует три точки для определения плоскости, а затем сохраняет Z параллельно этой плоскости.Это полезно, если Z-пластина / станина не идеально выровнены с порталом XY | ||||
| leveling-strategy.three-point-leveling.point1 | 100.0,0.0 | Первая точка измерения (X, Y) | ||||
| leveling-strategy.three-point-leveling.point2 | 200.0 200.0 | Вторая точка измерения (X, Y) | ||||
| leveling-strategy. Трехточечное выравнивание.point3 | 0,0,200,0 | Третья точка измерения (X, Y) | ||||
| leveling-strategy.three-point-leveling.home_first | true | Установите оси X и Y в исходное положение перед зондированием | ||||
| leveling-strategy.three-point-leveling.tolerance | 0,03 | Допуск датчика в миллиметрах, все, что меньше, будет проигнорировано, по умолчанию 0.03мм | ||||
| leveling-strategy.three-point-leveling.probe_offsets | 0,0,0 | Смещение датчика от сопла должно быть X, Y, Z (Z всегда должно быть 0), по умолчанию нет смещение. Это используется, если ваше сопло не находится точно в том же месте, где был бы ваш инструмент. | ||||
| leveling-strategy.three-point-leveling.save_plane | false | Установите значение true, чтобы разрешить сохранение плоскости основания с помощью M500, по умолчанию - false |
Пример конфигурации
Чтобы активировать эту стратегию выравнивания, скопируйте / вставьте следующее в файл конфигурации и отредактируйте его соответствующим образом:
стратегия выравнивания.three-point-leveling.enable true # Установите значение true, чтобы включить стратегию выравнивания, которая исследует три точки для определения
# плоскость, а затем удерживает Z параллельно этой плоскости. Это полезно, если
# ваша пластина / станина Z не идеально выровнена с порталом XY
leveling-strategy.three-point-leveling.point1 100.0,0.0 # Первая точка измерения (X, Y)
выравнивающая стратегия.three-point-leveling.point2 200.0,200.0 # Вторая точка измерения (X, Y)
leveling-strategy.three-point-leveling.point3 0.0,200.0 # Третья контрольная точка (X, Y)
leveling-strategy.three-point-leveling.home_first true # Установите оси X и Y перед зондированием
leveling-strategy.three-point-leveling.tolerance 0,03 # Допуск датчика в миллиметрах, все меньше, чем это будет
# игнорируется, по умолчанию 0.03мм
leveling-strategy.three-point-leveling.probe_offsets 0,0,0 # Смещение датчика от сопла должно быть X, Y, Z (Z всегда должно быть 0),
# по умолчанию без смещения. Это используется, если ваша насадка не совсем
# в том же месте, где был бы ваш инструмент.
leveling-strategy.three-point-leveling.save_plane false # Установите значение true, чтобы разрешить сохранение плоскости основания с помощью M500, по умолчанию - false Использование
Перед запуском датчика машина должна быть размещена в координатах X и Y.
Если вам нужно установить высоту станины после измерения, вы должны установить высоту в первой точке измерения и сохранить ее вместе с смещениями начала отсчета. (M206 или M306)
| G29 | исследует три точки датчика и сообщает Z в каждой точке, если плоскость активна, она будет использоваться для выравнивания датчика. | |||
| G32 | Зондирование трех точек зонда и определение плоскости основания, это будет оставаться в силе до сброса или M561 | |||
| G31 | Сообщает о состоянии | |||
| M557 | Определяет точки измерения | |||
| M561 | Очищает плоскость, и выравнивание станины отключается до тех пор, пока G32 не будет запущен снова ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M565 | Определяет смещения датчика от сопла или головки инструмента | |||
| M500 | Сохраняет точки измерения и смещения датчиков | |||
| M503 | Отображает текущие настройки |
Пример использования:
(работает, только если у вас есть упор Z, а также датчик).
G28 (исходный XYZ)
(Переместите Z примерно на 30 мм и прикрепите зонд, если у вас съемный зонд)
G32
(Снимите зонд, если у вас съемный зонд)
M500 (для сохранения результатов зондирования)
G28 (исходный XYZ)
(Перейдите к точке P0 датчика (первая точка датчика))
(бегом вниз, чтобы коснуться тарелки)
M306 Z0
M500 (для сохранения смещения начала отсчета)
G28
(Переместитесь на 0,0, проверьте высоту Z)
(Перейдите к P0, проверьте высоту Z, то же самое для P1 и P2) Карта высот зондирования
Нет ничего идеального
Эта стратегия выравнивания исследует прямоугольную сетку.размер точек по X и Y (общий размер зонда * размер) и сохраняет относительные смещения от высоты 0,0 Z.
Если этот параметр включен, при каждом перемещении будет вычисляться смещение по оси Z на основе интерполяции смещения высоты в пределах сетки ближайших 4 точек.
ПРИМЕЧАНИЕ в этой версии есть NO экстраполяция. Однако самая последняя прошивка не будет прыгать за пределы исследуемой области, вместо этого будет использоваться ближайшая высота края.
ПРИМЕЧАНИЕ ДОЛЖЕН правильно установить Z0 (или закрыть) перед выдачей зонда G32, так как он может переместиться на указанное значение initial_height (если установлено) до начала зондирования, поэтому необходимо знать, где приблизительно находится Z0.
Конфигурация
Стратегия должна быть включена в конфигурации, а также в zprobe.
leveling-strategy. rectangular-grid.enable true
Также необходимо указать размер кровати:
leveling-strategy.rectangular-grid.x_size 75 leveling-strategy.rectangular-grid.y_size 50
Размер сетки (количество точек измерения по X и Y) ДОЛЖЕН быть установлен с помощью…
Для квадратной кровати:
стратегия выравнивания.прямоугольная сетка. размер 7
Это размер сетки по осям X и Y, он должен быть нечетным числом (например, 7, 9, 11, 13), по умолчанию - 7, что соответствует 49 точкам измерения (7 × 7 - 49).
Для прямоугольной кровати (x_size отличается от y_size):
leveling-strategy.rectangular-grid.grid_x_size 9 leveling-strategy.rectangular-grid.grid_y_size 7
стратегия выравнивания. Прямоугольная сетка.do_home true
Это можно установить, если вы хотите, чтобы стратегия выравнивания вернулась к исходному состоянию перед зондированием.
Если вы не используете все 3 ограничителя (или предпочитаете вернуться в исходное положение вручную до G32):
leveling-strategy.rectangular-grid.do_home false
Примечание
Вы несете ответственность за то, чтобы (0,0) находился в повторяемом месте, если вы установили do_home на false .
Опционально смещения датчика от сопла или головки инструмента могут быть определены с помощью…
leveling-strategy.rectangular-grid.probe_offsets 0,0,0 # смещения датчика x, y, z (Z всегда должно быть 0)
Смещения зонда также можно настроить с помощью M565 X0 Y0 Z0.
Головка вашего принтера будет перемещена на размеры платформы X и Y, указанные выше, ПЛЮС любое смещение X и / или Y.
Убедитесь, что механизм вашего принтера позволяет перемещаться в эти места.
Например, если ваш зонд находится на 60 мм ниже от сопла в направлении Y (M565 X0 Y-60 Z0), а ваша станина установлена на 200x200 мм, верхний ряд зондов будет выполнен с соплом с Y = 260 мм.
Смещение сетки
Первая точка сетки всегда находится в (0,0). Если ваш принтер не может достичь этой точки с помощью датчика из-за смещения датчика, у вас есть несколько вариантов:
1.Установите смещение начала отсчета, чтобы учесть смещение датчика и / или уменьшить размер сетки x / y, чтобы учесть смещения датчика.
2. Вы можете перевернуть одну или несколько осей так, чтобы (0,0) находилась в доступной позиции.
3. Вы можете установить
стратегия выравнивания. Прямоугольная сетка.only_by_two_corners true
и укажите смещение в Gcode, используя дополнительные параметры команды G32 .
См. Дополнительную информацию в разделе «Фрезерование печатных плат»: «Фрезерование печатных плат».
Если сохраненная сетка должна быть загружена при загрузке, это должно быть установлено в конфигурации…
стратегия выравнивания.rectangular-grid.save true
Затем, когда будет выпущен M500, он сохранит M375, что приведет к загрузке сетки при загрузке. По умолчанию сетка не загружается автоматически при загрузке.
Примечание
Размер сетки и размер прямоугольника сохраняются в файле и восстанавливаются при загрузке с M375. Если размер сетки отличается от размера в конфигурации, будет загружаться НЕ . Если прямоугольник отличается, то прямоугольник будет установлен на то, что было сохранено, вместо того, что было установлено в config.
НЕ вызывайте M375 из файла gcode, так как это вызовет нехватку памяти и сбой системы.
Можно установить значение initial_height для , которое сообщает датчику, откуда следует начинать первый датчик, это должно быть примерно на 5-10 мм выше высоты датчика над слоем, он переместится в указанное здесь абсолютное положение Z перед запуском первого датчика. . Например, это полезно для датчиков Bltouch, которые развертываются автоматически, поскольку они поднимают датчик с поверхности перед перемещением в первое положение датчика.
leveling-strategy.rectangular-grid.initial_height 10 # перейти к Z10 перед первым тестированием.
Если вы предпочитаете, чтобы алгоритм компенсации медленно уменьшался после определенного момента, вы можете использовать новые конфигурации функций, чтобы сделать это сейчас. Сначала вам нужно настроить эти две конфигурации:
leveling-strategy.rectangular-grid.dampening_start 0.5 # алгоритм будет применяться все реже и реже с этой высоты leveling-strategy.rectangular-grid.height_limit 1 # алгоритм перестанет применять компенсацию с этой точки и далее
Настройки демпфирования
Обе эти настройки необходимо указать в файле конфигурации для работы функции компенсации демпфирования.Если какой-либо из них отсутствует, компенсация будет применяться ко всем высотам (старое поведение и поведение по умолчанию).Будьте осторожны при использовании этих настроек, так как может показаться, что они полностью отключают любую компенсацию. Рекомендуется не устанавливать их до тех пор, пока выравнивание не будет проверено и работает.
ПРИМЕЧАНИЕ height_limit и dampening_start находятся в координатах машины, поэтому, если вы установили Z с помощью G92 или аналогичного, он может не остановиться на той высоте, которую вы думаете.
Установив конфигурацию, как указано выше, компенсация будет применяться до тех пор, пока MCS не станет 0.5 миллиметров, затем он начинает медленно уменьшаться до тех пор, пока MCS не достигнет 1 миллиметра, а не применяется с 1 мм и выше.
Ограничения
Не рекомендуется устанавливать «height_limit» меньше максимальной высоты изгиба вашей кровати; потому что в этом случае вы потеряете компенсацию, выплачиваемую вам. В качестве начальных значений вы можете установить «dampening_start» на 0,1 мм больше, чем максимальная высота, отображаемая на карте кровати, и установить «height_limit» на удвоенное значение - так вы получите лучшее из обоих миров.
Старые карты еще действительны!
Эта новая конфигурация демпфирования никоим образом не изменяет способ хранения сетчатых карт, поэтому вы все равно можете использовать эту конфигурацию без необходимости перекалибровать кровать. Это позволяет вам поэкспериментировать и отключить функцию, если она вам не нравится, без каких-либо затрат!ВАЖНО set mm_per_line_segment:
mm_per_line_segment 1 # необходимо для декартовых вычислений с использованием прямоугольной сетки
Чтобы узнать, как использовать выравнивание сетки для фрезерования печатных плат, см. Фрезерование печатных плат.
Варианты конфигурации
| Опция | Пример значения | Пояснение |
|---|
| выравнивание-стратегия.rectangular-grid.enable | true | В конфигурации должна быть включена стратегия, а также модуль zprobe. | ||||
| leveling-strategy.rectangular-grid.x_size | 190 | расстояние от исходного положения до правого края станины в мм | ||||
| leveling-strategy.rectangular-grid.y_size | 180 | расстояние от исходного положения до верхней кромки в мм | ||||
| выравнивание-стратегия.rectangular-grid.size | 7 | Размер сетки (размер X == размер Y), например, 7 вызывает сетку 7 × 7 с 49 точками. Должно быть нечетное число. | ||||
| leveling-strategy.rectangular-grid.grid_x_size | 9 | Размер сетки по оси X. Для размера X! = Размер Y. Должно быть нечетное число. | ||||
| leveling-strategy.rectangular-grid.grid_y_size | 7 | Размер сетки по оси Y.Для размера X! = Размер Y. Должно быть нечетное число. | ||||
| leveling-strategy.rectangular-grid.probe_offsets | 0,0,0 | Дополнительные смещения датчика от сопла или головки инструмента в мм | ||||
| leveling-strategy.rectangular-grid.save | false | Если сохраненная сетка должна загружаться при загрузке, тогда это должно быть установлено в true | ||||
| выравнивание-стратегия.rectangular-grid.initial_height | 10 | Initial_height (в мм) сообщает начальному датчику, куда двигаться по оси Z, прежде чем он выполнит измерения, это должно быть примерно на 5-10 мм над слоем | ||||
| leveling-strategy.rectangular-grid.human_readable | true | Человекочитаемое форматирование таблицы датчиков | ||||
| leveling-strategy.rectangular-grid.only_by_two_corners | true | G29 / 31/32 не будет работать без параметров XYAB: XY - начальная точка, размер прямоугольника AB от начальной точки.«Два угла» «не совсем правильное название для этого режима, потому что в нем используется только один угол и размер прямоугольника. Этот режим предназначен для фрезерования печатной платы, когда вы работаете с платой, размер которой отличается от размера станины. Подробнее об этом режиме в фрезеровании печатных плат | ||||
| leveling-strategy.rectangular-grid.dampening_start | 0,5 | Компенсация обычно применяется для всех высот с полной мощностью. Если вы установите этот параметр на высоту, компенсация будет применяться все меньше и меньше (линейно) до тех пор, пока не будет достигнуто значение «height_limit».Любая высота до этой настройки все еще будет полностью компенсирована | ||||
| leveling-strategy.rectangular-grid.height_limit | 1 | Алгоритм компенсации перестанет работать после этого предела, начиная с параметра «dampening_start». После того, как высота превысит этот предел, компанирование больше не будет применяться | ||||
| leveling-strategy.rectangular-grid.before_probe_gcode | M280 | автоматически развертывает датчик bltouch перед зондированием | ||||
| выравнивание-стратегия.rectangular-grid.after_probe_gcode | M281 | автоматически складывает сенсорный экран после измерения |
Пример конфигурации
Чтобы активировать эту стратегию выравнивания, скопируйте / вставьте следующее в файл конфигурации и отредактируйте его соответствующим образом:
leveling-strategy.rectangular-grid.enable true # Стратегия должна быть включена в конфиге, как и модуль zprobe.
выравнивающая стратегия.rectangular-grid.x_size 75 # размер кровати по оси X
leveling-strategy.rectangular-grid.y_size 50 # размер грядки по оси Y
leveling-strategy.rectangular-grid.size 7 # Размер сетки, например, 7 вызывает сетку 7x7 с 49 точками.
# Должно быть нечетное число.
leveling-strategy.rectangular-grid.do_home true
стратегия выравнивания. прямоугольная сетка.probe_offsets 0,0,0 # Дополнительные смещения датчика от сопла или головки инструмента
leveling-strategy.rectangular-grid.save false # Если сохраненная сетка должна быть загружена при загрузке, то это должно быть установлено в true
leveling-strategy.rectangular-grid.initial_height 10 # переместится на Z10 перед первым зондом
mm_per_line_segment 1 # необходимо для декартов, использующих прямоугольную сетку
# leveling-strategy.rectangular-grid.before_probe_gcode M280 # раскомментируйте, если у вас есть bltouch
# стратегия выравнивания.rectangular-grid.after_probe_gcode M281 # раскомментируйте, если у вас bltouch Использование
| G29 | тестовые зонды в сетке в пределах указанного размера, начиная с текущего положения головки, создавая карту смещений, это можно импортировать в графическую программу для визуализации слоя. Обязательные параметры Xn задает ширину для этого датчика, а Yn задает длину для этого датчика. дополнительные параметры В и Jn устанавливает размер сетки (по умолчанию устанавливается в config). | |||
| G32 | проверяет сетку и включает компенсацию, это будет оставаться в силе до сброса или M561 / M370 дополнительные параметры Jn задает радиус для этого датчика. | |||
| M370 | очищает сетку и отключает компенсацию ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M374 | Сохранить сетку в / sd / cartesian.сетка | |||
| M374.1 | удалить /sd/cartesian.grid | |||
| M375 | Загрузите сетку из /sd/cartesian.grid и включите компенсацию ( ПРИМЕЧАНИЕ вы должны вернуться после этого) | |||
| M375.1 | отображение текущей сетки | |||
| M561 | очищает сетку и отключает компенсацию ( ПРИМЕЧАНИЕ после этого вы должны вернуться домой) | |||
| M565 | определяет смещение зонда от сопла или головки инструмента | |||
| M500 | сохраняет точки измерения | |||
| M503 | отображает текущие настройки |
Пример использования:
G28 (исходный XYZ)
(Отодвиньте Z минимум на 30 мм от кровати, если это не так, и прикрепите датчик, если у вас съемный датчик)
G32 (зондировать сетку)
(Снимите зонд, если у вас съемный зонд)
M500 (для сохранения результатов зондирования)
G28 (исходный XYZ)
(бегом вниз, чтобы коснуться тарелки)
M306 Z0
M500 (для сохранения смещения начала отсчета)
G28
(Теперь машина выровнена по сетке и знает правильную высоту над станиной) После возврата в исходное положение (с G28 ) машина знает, что она находится в максимальном положении Z, если ваша машина находится в максимальном положении, и в минимальном положении Z, если ваша машина находится в минимальном.
Из-за этого он будет читать параметр конфигурации gamma_max или gamma_min в зависимости от и устанавливать текущую позицию Z на это значение.
Таким образом, после наведения позиция Z устанавливается на gamma_max или gamma_min .
Это означает, например, что если вы находитесь на максимальном уровне, если ваш хотэнд находится на 300 мм выше вашей кровати после возврата в исходное положение, и вы устанавливаете gamma_max на 300, после возврата в исходное положение вы можете просто сказать машине перейти в положение Z 0, и она пойдет. к высоте кровати.
Проще говоря, установка gamma_max или gamma_min - это ваш способ сообщить Smoothie, какое расстояние между вашей кроватью и хотендом, когда машина только что подключилась.
Чтобы найти правильное значение для gamma_max или gamma_min , выполните одно из следующих действий:
Упрощенный метод ручной настройки (Рекомендуемый метод)
Первая домашняя машина:
G28
Затем перейдите к точке, которую машина считает Z 0:
G0 Z0
Затем переместите голову к кровати, бегая трусцой, используя стрелки Pronterface, панель, веб-интерфейс или любой другой способ, подходящий в вашем случае.
Наконец, введите команду M306 Z0 , которая будет использовать текущую позицию Z в качестве смещения начала отсчета:
ПРИМЕЧАНИЕ Вы не можете использовать M306, если у вас нет ограничителей начала отсчета Z, если вы не можете установить Z в исходное положение, вы не сможете установить смещения начала отсчета.
M306 Z0
Затем сохраните на SD-карту с помощью M500 :
M500
В следующий раз, когда вы вернетесь домой, машина будет знать, насколько она высоко над кроватью.
Поиск gamma_max вручную
Первая домашняя машина:
G28
Затем установите текущую позицию Z на 0:
G92 Z0
Затем переместите голову к кровати, бегая трусцой, используя стрелки Pronterface, панель, веб-интерфейс или любой другой способ, подходящий в вашем случае.
Как только голова окажется точно у кровати, выполните эту команду:
M114
Это вернет положение всех осей. Текущее положение оси Z - это значение, которое вы должны использовать в качестве значения gamma_max .
Теперь просто отредактируйте файл конфигурации, чтобы установить это значение, и сбросьте плату.
В качестве альтернативы (только дельта) вы можете использовать команду M665 Z (расстояние) для установки значения в системе переопределения конфигурации и M500 , чтобы сохранить это значение на SD-карту.
Значение gamma_max в файле конфигурации игнорируется, если M665 задано и сохранено.
В следующий раз, когда вы вернетесь домой, машина будет знать, насколько она высоко над кроватью.
Определение gamma_max зондом
Если у вас есть какой-то зонд, прикрепленный к вашей голове (или под вашей головой), который срабатывает, когда hotend приближается к кровати, вы можете использовать его, чтобы найти значение gamma_max без ручного бега.
Здесь есть два разных случая:
Либо при срабатывании датчика хотенд находится точно на уровне кровати (это в случае датчиков под кроватью, либо датчиков, срабатывающих при нажатии на сам датчик)
Или, когда датчик срабатывает, хотенд находится над слоем на заданном расстоянии, которое мы будем называть смещением датчика z (это случай датчиков с сервоприводом, bltouch, индуктивных датчиков, ИК-датчиков и т. Д.) .
Первая домашняя машина:
G28
Затем попросите зонд найти кровать:
G30
Это сообщит расстояние, пройденное зондом.
Значение gamma_max - это указанное расстояние плюс смещение зонда по оси z (расстояние между точкой срабатывания зонда и слоем).
Например, если вы дома, то выполните G30 , и он сообщает о высоте 311 мм, а ваш датчик находится на 7 мм ниже вашего хотэнда, тогда ваш gamma_max равен 311 + 7 = 318 мм.
Просто отредактируйте файл конфигурации, чтобы установить это значение, и сбросьте плату.
В качестве альтернативы вы можете использовать команду M665 Z (расстояние) , чтобы установить значение в системе переопределения конфигурации, и команду M500 , чтобы сохранить это значение на SD-карту.
Значение gamma_max в файле конфигурации игнорируется, если M665 задано и сохранено.
В следующий раз, когда вы вернетесь домой, машина будет знать, насколько она высоко над кроватью.
Автоматический поиск кровати зондом
Smoothie позволяет сохранять на SD-карту как высоту по оси Z, так и данные дельта-калибровки.
Это означает, что вам не нужно проверять каждый раз, когда вы запускаете машину, вам нужно сделать это только один раз и сохранить значения, которые будут оставаться действительными до тех пор, пока геометрия вашего станка не изменится.
Это означает, что у вас может быть съемный зонд, который вы подключаете и прикрепляете к голове только в тех редких случаях, когда он вам нужен.
Однако, если по какой-либо причине у вас есть фиксированный (или выдвижной) зонд на голове (или датчики, расположенные под кроватью), вы можете захотеть автоматически зондировать в начале каждого отпечатка.
Для этого просто измените последовательность G-кода «начала файла» в программе нарезки и замените:
G28
с участием :
G28 G30 Znnn
Когда nnn - это расстояние между точкой срабатывания датчика и пластиной (или смещением датчика):
Команда G30 Znnn перемещает головку, пока датчик не сработает, затем устанавливает текущую высоту Z на nnn
Так, например, если ваш датчик срабатывает, когда хотэнд находится на 5 мм над кроватью, выполните G30 Z5 , а если ваш датчик срабатывает точно, когда хотэнд касается кровати, выполните G30 Z0 .
ПРИМЕЧАНИЕ за кулисами G30 Z0 выполняет G92 Z0, поэтому вы можете сохранить это, если вы установите save_g92 true в config и выдадите M500, который сохраняет смещение равным 0. Обратите внимание, что G92 создает новую систему координат, называемую координатами рабочего пространства system (или WCS) стоит прочитать, как это работает.
Если вы делаете это вручную, вы можете сэкономить время, переместив Z на расстояние 5 мм от кровати, а затем выпустите G30 Z0
Идем дальше
Если вы хотите узнать больше об этом модуле или вам интересно, как он работает, Smoothie имеет открытый исходный код, и вы можете просто посмотреть код здесь.Использование FSR и датчиков приближения в качестве зонда
Сообщение о FSR и других бесконтактных датчиках
Если вы используете их и не получите хорошего результата калибровки, внимательно посмотрите на повторяемость датчика на различных частях кровати, прежде чем обвинять Smoothie. Также для датчиков сетки и т.п. вам понадобится датчик, который обнаруживает пласт в точке, тогда как такие вещи, как датчики приближения и ИК-датчики, обнаруживают область, а не точку, это делает точки сетки менее надежными.FSR должны быть установлены особым образом, чтобы они не срабатывали из-за вибрации и не требовали слишком большого усилия перед срабатыванием. Бесконтактные датчики , как правило, дают разные результаты в зависимости от того, где они находятся на слое, на это влияет разная плотность нижележащего металла и меньшее количество металла по краям, что делает результаты калибровки менее оптимальными.
Настроить FSR для надежной работы непросто ...
Чтобы использовать FSR со смузи-доской, необходима дополнительная плата для подключения FSR к входу концевого выключателя смузи.Smoothieware примет этот ввод, как если бы это был простой механический переключатель.
JohnSL на Github создал такую доску. Он доступен через AndOrNot, TriD Printing и UltiBots. См. Сообщение в блоге Джона о доске. Эта плата питается от концевых контактов. Также см. Статью AndOrNot о дизайне FSR для дизайна подушечки FSR для дельта-принтера.
Также на Github есть 4-точечный контроллер FSR под названием «Toucher». подходит для квадратных обогревателей на декартовых машинах. Эталонный дизайн крепления FSR опубликован на Thingiverse.
В группе Deltabot сосредоточено большинство дискуссий по использованию FSR.
Темы для поиска:
Предполагается, что BLTouch имитирует сервоуправляемый датчик-переключатель. Он подключен, настроен и подключен так же, как сервопривод и переключатель. Однако НЕ ведет себя точно так же, как микропереключатель, активация - это импульс, а не включение / выключение и, следовательно, не работает с M119, а серво ШИМ немного отличается.
BL Сенсорный датчик
Как подключить датчик bltouch, старые версии (предположительно до 3.1, bltouch не дает точной документации) . Для получения наиболее точной и актуальной информации посетите официальную страницу документации Antclabs.
BL Сенсорный датчик
Как подключить сенсорный датчик, обновленная версия (3.1)
Или в формате, удобном для копирования и вставки:
# Модуль переключения для управления Bltouch switch.servo.enable true # Активировать этот новый модуль switch.servo.input_on_command M280 # Команда для установки значения ШИМ переключатель.servo.input_off_command M281 # Команда выключения переключателя switch.servo.output_pin 1.23 # Это должен быть вывод ШИМ, см. smoothieware.org/pinout switch.servo.output_type hwpwm # Аппаратный ШИМ, так как программный ШИМ не подходит для серво / bltouch switch.servo.pwm_period_ms 20 # период 20 мс, или 50 Гц
Обратите внимание, что эта проводка также действительна для сервопривода и датчика переключения, так как это то, что имитирует bltouch.
При подключении bltouch желтый провод на 3-контактном разъеме необходимо подключить к контакту HWPWM на смузи, допустимые контакты - 1,23, 2,4, 3,25 или 3,26, как показано на схеме проводов на сайте antlabs: https: //www.antclabs .com / wiring32
ОБНОВЛЕНИЕ на последней прошивке Smoothie теперь вы можете использовать программную эмуляцию ШИМ, что означает, что вы можете использовать любой вывод для контрольного вывода, просто измените следующие строки конфигурации ...
# Модуль переключения для управления Bltouch с помощью программного обеспечения PWM # Обратите внимание, что в последней прошивке с этими настройками вы можете просто выпустить M280 для развертывания и M281 для хранения переключатель.servo.enable true # Активировать этот новый модуль switch.servo.input_on_command M280 # Команда для установки значения ШИМ switch.servo.input_off_command M281 # Команда выключения переключателя switch.servo.output_pin 2.11 # Это может быть ЛЮБОЙ запасной контакт switch.servo.output_type swpwm # Программно эмулированный ШИМ switch.servo.pwm_period_ms 20 # период 20 мс или 50 Гц switch.servo.startup_state false # использовать start_value в качестве начальной настройки переключатель.servo.startup_value 7.43 # При загрузке он перейдет в режим хранения switch.servo.default_on_value 3.3 # значение устанавливается, если M280 выдается без параметра S, также значение устанавливается, если значение startup_state истинно
| ~ Команда | ~ Статус BLTouch | |||
| M280 S3.0 | Нажимной штифт вниз | |||
| M280 S7.0 | Нажимной штифт вверх | |||
| M280 S10.6 | Срабатывание сигнализации | |||
| M280 S8.4 | Самопроверка | |||
| M280 S5.5 | ZMin тестовый режим (для M119 ) |
Примеры пользовательских кодов команд для зондирования BLT
custom_menu.blt_probe_out.enable true # custom_menu.blt_probe_out.name BLT_Probe_Out # custom_menu.blt_probe_out.command M280S3 # custom_menu.blt_probe_In.enable true # custom_menu.blt_probe_In.name BLT_Probe_In # custom_menu.blt_probe_In.command M280S7 # custom_menu.blt_reset_alarm.enable true # custom_menu.blt_reset_alarm.name BLT_Reset_Alarm # custom_menu.blt_reset_alarm.command M280S10.6 # custom_menu.blt_test_alarm.enable true # custom_menu.blt_test_alarm.имя BLT_Test_Alarm # custom_menu.blt_test_alarm.command M280S8.4 | G4S15 | M280S10.6 | M280S7 #Runs Self Test 15secs сбрасывает и подтягивает контакт custom_menu.blt_probe_bed.enable true # custom_menu.blt_probe_bed.name BLT_Probe_Bed # custom_menu.blt_probe_bed.command M280_S3.0 | G32 | M280_S7.0 | G1X10Y10 #
В этом видео показан пример последовательности зондирования (которая, например, может быть помещена в начало ваших файлов Gcode) с помощью bltouch:
Официальное видео Bltouch о Smoothieboard:
Если у вас 5XC
Обратите внимание, что на Smoothieboard 5XC контакт 1.23 используется третьим большим МОП-транзистором, поэтому вы не можете использовать его для сенсорного ввода, вам нужно использовать другой контакт. Этот другой вывод также должен поддерживать ШИМ, см. Распиновку, чтобы найти другой вывод, который будет работать. Вы также можете использовать SWPWM и любой запасной штифт.Примечание эти датчики обычно гораздо менее надежны, чем простой механический переключатель для измерения сетки. Это связано с тем, что они определяют общую область, тогда как при зондировании сетки необходимо определять область точечного контакта, чтобы быть точным. Кроме того, они имеют тенденцию изменять расстояние обнаружения по мере приближения к краю, поэтому вам нужно хорошо прощупать центр массы кровати.Однако, если это то, что у вас есть, вот видео о них:
Если вы хотите иметь возможность развертывать и втягивать зонд с помощью небольшого серводвигателя, см. Документацию модуля переключателя.
Это не строго связано с зондом, но пользователи зондирования, вероятно, будут его искать. Если вам нужно сделать небольшую корректировку в реальном времени по высоте Z, взгляните на эту страницу
.