ПДД РБ глава 18. Движение в жилых зонах
131. Жилая зона обозначается дорожными знаками 5.38 «Жилая зона», 5.39 «Конец жилой зоны». В жилой зоне движение пешеходов разрешается по тротуарам и по проезжей части дороги. Пешеходы имеют преимущество перед транспортными средствами, но не должны препятствовать его движению.132. В жилой зоне водителям механических транспортных средств запрещается:
132.1. движение со скоростью более 20 км/ч;
132.2. транзитное движение;
132.3. обучение вождению;
132.4. стоянка с работающим двигателем;
132.5. стоянка грузовых автомобилей с максимальной массой более 3,5 тонны, автобусов, тракторов, дорожно-строительных и других машин вне специально выделенных мест, обозначенных дорожным знаком 5.15 «Место стоянки», если это не связано с обслуживанием проживающих граждан, предприятий, зданий и сооружений.
133. При выезде из жилой зоны водители транспортных средств должны уступить дорогу другим участникам дорожного движения.
134. Требования настоящей главы распространяются также на прилегающие территории и дворы.
Другие главы ПДД Республики Беларусь
Глава 1 ПДД РБ Общие положения Глава 2 ПДД РБ Права участников дорожного движения Глава 3 ПДД РБ Обязанности водителей Глава 4 ПДД РБ Обязанности водителей и иных участников дорожного движения в особых случаях Глава 5 ПДД РБ Обязанности пешеходов Глава 6 ПДД РБ Обязанности пассажиров Глава 7 ПДД РБ Сигналы дорожных светофоров и регулировщика Глава 8 ПДД РБ Применение аварийной световой сигнализации и знака аварийной остановки Глава 9 ПДД РБ Начало движения, маневрирование Глава 10 ПДД РБ Расположение транспортных средств на проезжей части дороги Глава 11 ПДД РБ Скорость движения Глава 12 ПДД РБ Обгон, встречный разъезд Глава 13 ПДД РБ Остановка и стоянка Глава 14 ПДД РБ Проезд перекрестков Глава 15 ПДД РБ Пешеходные переходы и остановки маршрутных транспортных средств Глава 16 ПДД РБ Железнодорожные переезды Глава 17 ПДД РБ Движение по автомагистрали Глава 19 ПДД РБ Приоритет маршрутных транспортных средств Глава 20 ПДД РБ Пользование внешними световыми приборами и звуковыми сигналами транспортных средств Глава 21 ПДД РБ Буксировка механических транспортных средств Глава 22 ПДД РБ Обучение вождению механического транспортного средства Глава 23 ПДД РБ Перевозка пассажиров Глава 24 ПДД РБ Перевозка грузов Глава 25 ПДД РБ Движение на велосипедах и мопедах Глава 26 ПДД РБ Движение гужевого транспорта и прогон животных Глава 27 ПДД РБ Основные положения по допуску транспортных средств к участию в дорожном движении, их техническое состояние, оборудование Глава 28 ПДД РБ Обязанности должностных и иных лиц автотранспортных и других организаций по обеспечению безопасности дорожного движенияВы юрист? Нужны новые клиенты?
Разместите информацию о себе
— Это бесплатно
— Информация о 5 лучших юристах на всех страницах сайта
— Эту рекламу видят более 10 000 посетителей в день
— Для поднятия рейтинга надо отвечать на вопросы пользователей
ЗарегистрироватьсяЗнак жилая зона — что означает и запрещает, как выглядит, пдд
Знать назначение дорожных знаков необходимо не только водителям, но и пешеходам, поскольку они тоже являются участниками дорожного движения. Нужно усвоить не только указатели пешеходного перехода, значение разных цветов светофора, но и знак «Жилая зона». Он имеет важное значение для организации дорожного и пешеходного движения в спальных кварталах и территориях, на которых расположены социальная и коммунальная застройки, служащие местом жизнедеятельности граждан.
Нужно усвоить не только указатели пешеходного перехода, значение разных цветов светофора, но и знак «Жилая зона». Он имеет важное значение для организации дорожного и пешеходного движения в спальных кварталах и территориях, на которых расположены социальная и коммунальная застройки, служащие местом жизнедеятельности граждан.
Как выглядит знак «Жилая зона» и что означает
Знак представляет собой прямоугольник синего цвета, где в левом верхнем углу изображён автомобиль, в правом верхнем углу располагается схематичное изображение дома, а под ними — пешехода и игры в мяч («Жилая зона» 5.21). Его назначение — информировать водителя об особом порядке осуществления дорожного движения вблизи расположения домов, образовательных учреждений и учреждений здравоохранения, коммунальных построек и объектов. Сегодня далеко не все жилые территории обозначены соответствующими дорожными указателями.
На территории знака преимущество имеют пешеходы, перемещение которых разрешается не только по тротуарам, но и по проезжей части
Преимущества
Преимущества установки 5. 21, прежде всего, заключаются в напоминании водителям о необходимости соблюдать запреты и ограничения, связанные с дорожным перемещением на территории действия указателя. Того, кто не соблюдает требования и запреты, которые предполагает 5.21, наказывают штрафами. Это предупредительная мера для профилактики совершения нарушений ПДД. В настоящее время актуальность этого дорожного указателя не уменьшается, а напротив, поступательно увеличивается. Все ещё на слуху резонансные случаи нарушений водителями правил дорожного движения, повлёкшие угрозу детским жизням и здоровью. Знак призван ещё раз напомнить водителям о необходимости соблюдать особый режим движения в зоне его действия.
21, прежде всего, заключаются в напоминании водителям о необходимости соблюдать запреты и ограничения, связанные с дорожным перемещением на территории действия указателя. Того, кто не соблюдает требования и запреты, которые предполагает 5.21, наказывают штрафами. Это предупредительная мера для профилактики совершения нарушений ПДД. В настоящее время актуальность этого дорожного указателя не уменьшается, а напротив, поступательно увеличивается. Все ещё на слуху резонансные случаи нарушений водителями правил дорожного движения, повлёкшие угрозу детским жизням и здоровью. Знак призван ещё раз напомнить водителям о необходимости соблюдать особый режим движения в зоне его действия.
Где устанавливается
Знак «Жилая зона» 5.21 обозначает въезд в жилую территорию, а «Конец жилой зоны» 5.22 (перечёркнутый) — выезд. Соответственно, 5.21 располагается при въезде в территорию жилой застройки с постройками социального и коммунального назначения, а 5.22 — при выезде из этой зоны. Несмотря на то что большинство подобных территорий не отмечены данным указателем, на их территории действует особый порядок организации и осуществления дорожного движения. К жилой зоне могут быть отнесены территории жилой застройки, а также прилежащая спортивная, социальная и другая инфраструктура, растительность, детские площадки, сады, парки, скверы, аллеи и т.д.
Несмотря на то что большинство подобных территорий не отмечены данным указателем, на их территории действует особый порядок организации и осуществления дорожного движения. К жилой зоне могут быть отнесены территории жилой застройки, а также прилежащая спортивная, социальная и другая инфраструктура, растительность, детские площадки, сады, парки, скверы, аллеи и т.д.
При выезде из жилой зоны водители должны уступить дорогу другим участникам движения
ПДД
В первую очередь, 5.21 предоставляет преимущества использования дорожной инфраструктурой пешеходам: им разрешено свободно перемещаться как по тротуарам и пешеходным дорожкам, так и по проезжей части. В связи с этим для автомобилистов действует ряд следующих запретов на осуществление:
- сквозного движения;
- маневрирования;
- учебной езды.
Зона действия
Зоной действия формально считается пространство, ограниченное с одной стороны указателями 5.21 и 5.22 — с другой. Вместе с тем, как уже сказано ранее, не все жилые территории отмечены знаком. Тем не менее, для перемещения в них определён аналогичный порядок. Таким образом, отсутствие знака на территории расположения частной жилой застройки и социальных учреждений не является основанием для несоблюдения особого режима дорожного движения, предполагающего ряд запретов и ограничений.
Вместе с тем, как уже сказано ранее, не все жилые территории отмечены знаком. Тем не менее, для перемещения в них определён аналогичный порядок. Таким образом, отсутствие знака на территории расположения частной жилой застройки и социальных учреждений не является основанием для несоблюдения особого режима дорожного движения, предполагающего ряд запретов и ограничений.
«Жилая зона — специально обустроенная территория, где действуют особые требования ПДД. Въезды и выезды обозначены соответственно знаками 5.21 и 5.22» (Градостроительный Кодекс РФ)
Если на дворовой и придомовой территории не установлены 5.21 и 5.22, то обычно имеется указатель с ограничением скорости 3.29 до 20 или 5 км/ч
Скорость и порядок движения
К скорости и порядку езды внутри ограниченной территории установлены требования:
- скорость не должна превышать 20 км/час;
- запрещено пересекать сплошную линию разметки при выезде из границ жилой территории.
Остановка и парковка
Касательно остановок и парковок внутри жилой территории действуют следующие ограничения и требования:
- запрещается стоянка более 5 минут с невыключенным двигателем;
- запрещается стоянка грузовиков вне специально отведённых мест, за исключением транспорта специального назначения, в том числе коммунальных служб;
- при въезде и выезде необходимо остановиться, чтобы пропустить движущийся по главной дороге транспорт.


Как самостоятельно установить, получить разрешение на установку
Причин для установки дорожного указателя может быть несколько:
- привычка водителей объезжать пробки и затор через частный сектор;
- прецеденты, являющиеся причиной необходимости обезопасить территорию;
- противодействие стихийным стоянкам грузовых и коммерческих автомобилей;
- защита детей от злоумышленников.
Так или иначе, главная причина, объединяющая решение множества задач, — обеспечение своей безопасности, детей и пожилых людей, проживающих в границах территории.
Автомобилист должен знать, что на ограниченной территории продолжает сохранять актуальность та же система штрафов, что и дорогах общего пользования
При соблюдении требований к месту размещения указателя он может быть установлен инициативной группой граждан или гражданином самостоятельно, но придётся соблюсти обязательные условия.
Во-первых, решение об установке принимается на уровне органов местного самоуправления. Для установки дорожного указателя требуется в установленном порядке подать соответствующее заявление. Требование к нему общие:
Для установки дорожного указателя требуется в установленном порядке подать соответствующее заявление. Требование к нему общие:
- наличие на заявлении наименования государственного органа или должностного лица, которому оно подаётся;
- наличие подписи, даты и контактной информации для осуществления обратной связи;
- описание сути проблемы, предложения;
- приложение в случае необходимости относящихся к сути дела соответствующих материалов.
Заявление может быть подано в бумажном или электронном виде. В качестве заявителя могут выступать:
- гражданин;
- общественная организация;
- группа граждан (например, все жители территории, в которой необходимо установить дорожный указатель).
Следует отметить, что рассмотрение обращений граждан органами государственной власти и органами местного самоуправления регламентировано соответствующим федеральным законом (Федеральный закон от 2 мая 2006 г. № 59-ФЗ «О порядке рассмотрения обращений граждан Российской Федерации»), предельный срок для рассмотрения ограничен 30 днями.

Во-вторых, в функции ГИБДД входит согласование решения с администрацией или же представление мотивированной позиции в пользу решения не устанавливать знак. По этой причине потребуется дополнительное время для рассмотрения ситуации и принятия по ней решения полномочными представителями ГИБДД.
Знак 5.21 создаёт приоритет для пешеходного перемещения над движением автотранспорта. Кроме того, его действие всесторонне направлено на обеспечение безопасной и комфортной жизни пешеходов, проживающих и осуществляющих свою деятельность на территории действия указателя. Кроме ограничений движения, он предполагает ряд мер, направленных на ограничение временной стоянки и опасного для пешеходов маневрирования и дорожного движения. Хотя не все территории оборудованы им, в них, тем не менее, действует особый режим организации дорожного движения. Чтобы самостоятельно установить упомянутые знаки (5.21 и 5.22), которые призваны запрещать превышение скорости, необходимо обратиться с личным или коллективным заявлением в орган местного самоуправления и получить согласование ГИБДД.
жилая зона. Правила движения, парковки, стоянки
Для напоминания водителям о границах территории, где необходимо соблюдать определенный скоростной режим и порядок, устанавливают знак «Жилая зона». В ПДД четко прописаны все требования по скоростному режиму, принципу проезда, приоритеты в границах зоны. Нарушение правил влечет за собой лишение водительского удостоверения и штраф.
Общее понятие
В ПДД жилая зона – это территория, на которой размещаются дома, объекты коммунального или социального назначения, стоянки транспортных средств. Также к этой территории относятся объекты здравоохранения и образования, гаражные кооперативы и другие места, связанные с обитание людей. К этому же понятию относят дворовые площадки, зоны насаждения растений.
По ПДД жилая зона – это территория, обозначенная соответствующим знаком. Обычно на въезде на такую территорию устанавливается знак 5.21 «Жилая зона». В том месте, где установлен знак 5.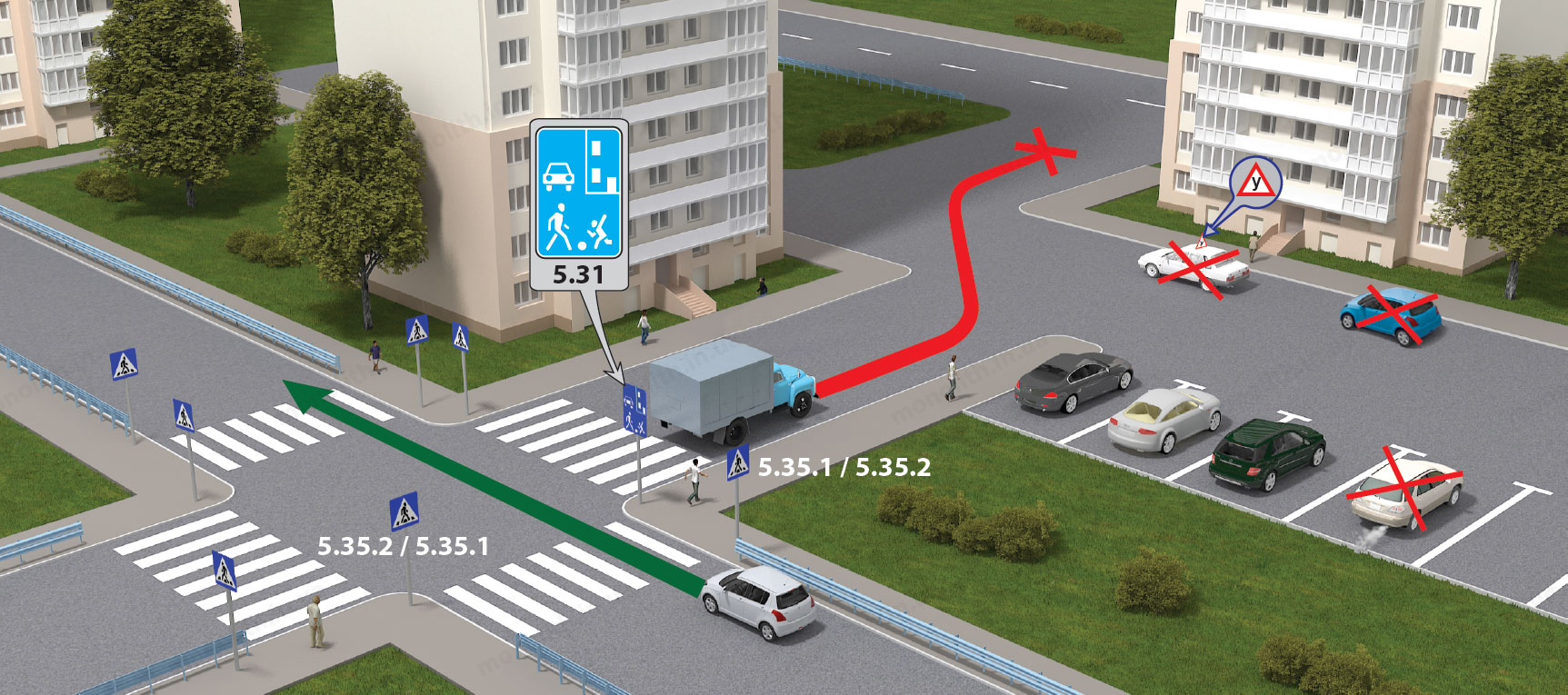 22, территория заканчивается, начинается действие правил движения в населенном пункте. На практике подобные знаки встречаются не везде. По умолчанию территория жилой зоны начинается от въезда во двор к домам, больницам, школам и т. д. В разделе 17 ПДД строго регламентируются требования к водителям, которые двигаются по жилой зоне.
22, территория заканчивается, начинается действие правил движения в населенном пункте. На практике подобные знаки встречаются не везде. По умолчанию территория жилой зоны начинается от въезда во двор к домам, больницам, школам и т. д. В разделе 17 ПДД строго регламентируются требования к водителям, которые двигаются по жилой зоне.
По сути, жилая зона – это жилой массив, въезд и выезд которого обозначены соответствующими знаками. Эта зона может иметь сеть своих улиц местного значения.
Знак жилой зоны может:
- быть установленным перед дворами спального района;
- обозначать территорию густонаселенного частного сектора;
- выделять торговую или деловую зону.
Как ездить
Преимуществом передвижения по жилой зоне обладают пешеходы. По ПДД «Жилая зона» распространяется на весь участок: тротуары, проезжую часть, располагаемую в границах зоны. Пешеходы имеют право передвигаться абсолютно в любом месте, и водитель обязан их пропускать, а тем более он не может создавать помеху гражданам при их передвижении. По ПДД, движение в жилых зонах велосипедистов расценивается так же, как пешеходов, т. е. они имеют преимущества перед автомобильным транспортом. Однако встать на проезжей части, чтобы поговорить по телефону, тем самым создав препятствие транспортному средству, человек не имеет права.
По ПДД, движение в жилых зонах велосипедистов расценивается так же, как пешеходов, т. е. они имеют преимущества перед автомобильным транспортом. Однако встать на проезжей части, чтобы поговорить по телефону, тем самым создав препятствие транспортному средству, человек не имеет права.
Что нельзя
По определению ПДД, жилая зона имеет ряд особых указаний. Так, водителям запрещается:
- Стоянка с включенным двигателем более 5 минут.
- Под запретом сквозное движение. В фильмах часто можно увидеть, как автомобиль пытается уйти от погони или догнать кого-то, срезав через дворы. Так делать нельзя, за это можно лишиться водительского удостоверения. Если же водитель сделает на пару минут остановку, а затем продолжит движение, то это уже не считается сквозным движением. Однако в правилах сказано, что можно заехать во двор и остановиться возле входа в подъезд или в другом месте для высадки пассажиров. В данной ситуации разрешается остановка в неположенном месте.
- Нельзя разворачиваться, сдавать назад. Однако эти маневры допускаются, но только в тех случаях, когда машина заехала в тупик.
- По правилам ПДД, в жилой зоне запрещена учебная езда.
 Однако эти маневры допускаются, но только в тех случаях, когда машина заехала в тупик.
Однако эти маневры допускаются, но только в тех случаях, когда машина заехала в тупик.Грузовые автомобили должны стоять на специальной стоянке.
Особенности движения
Во время передвижения по жилой зоне скорость не должна быть больше 20 км/ч. При въезде и выезде за черту действия зоны водители должны остановиться и уступить дорогу другим участникам движения, т. е. они должны пропустить все автомобили, проезжающие по основной дороге, а также пешеходам, мотоциклистам, велосипедистам.
Если на выезде имеется сплошная линия, то ее пересекать нельзя.
Стоянка
По определению стоянка – это прекращение движения транспортного средства на время более 5 минут. При этом двигатель машины может быть включен или же выключен. Однако в жилой зоне все иначе, и за нарушение правил стоянки может быть наложен штраф.
По ПДД стоянка в жилой зоне может быть только в специально отведенных местах. Запрещается ставить транспорт на газоны, клумбы, в пределах детских площадок. Средства для передвижения разрешается ставить на стоянку только в специально отведенных для этого местах.
Запрещается ставить транспорт на газоны, клумбы, в пределах детских площадок. Средства для передвижения разрешается ставить на стоянку только в специально отведенных для этого местах.
О парковке в жилой зоне в ПДД сказано следующее:
- Нельзя ставить транспортное средство на участках с зелеными насаждениями.
- Запрещается стоянка транспорта, во время которой создается препятствие для движения машин спецслужб.
- Нельзя ставить во дворах грузовые машины массой более 3,5 т, если нет специально оборудованного для парковки места.
- Нельзя ставить машину в местах, где они будут мешать пешеходам и другим транспортным средствам.
Обычно в жилой зоне имеются специальные парковочные места, куда можно поставить машину.
Если припаркованное автотранспортное средство мешает пешеходам или проезду других участников движения, то после уведомления владельца машины, который проигнорирует просьбу, будут применены штрафные санкции, а машину эвакуируют.
В остальном правила парковки такие же, как на других участках на территории населенного пункта.
Наказания
При нарушении правил движения по жилой зоне водителю грозит:
- Штраф. Если водитель нарушил правила въезда или выезда с жилой зоны, не пропустил пешехода или же оставил машину с включенным двигателем, а тем более поставил ее на детской площадке или в ином запрещенном месте, то наказание – штраф.
- Изъятие водительских прав. В тех случаях, когда водитель превышает допустимую скорость движения по жилой зоне, предусматривается лишение водительского удостоверения сроком на 1 год.
Водители постоянно пользуются тем, что инспекторы ГИБДД или ДПС редко заезжают в жилые зоны. Из-за этого они постоянно превышают скорость, ставят машины там, где хотят, а не на местах стоянки. Зачастую можно увидеть стоящий автомобиль на газоне, а это нарушение правил ДД. Важно понимать, что всегда может найтись какой-нибудь доброжелатель, который сообщит о нарушении в ГИБДД, предоставив доказательства вины водителя. В этом случае от наказания не отвертеться, придется заплатить за нарушение правила.
В зимнее время года, когда водители прогревают двигатель своего автомобиля во дворе, они нарушают ПДД. Но если через пять минут после включения двигателя машина поедет, то нарушений не будет, ПДД соблюдены.
Пешеходы в приоритете
Увидев знак «Жилая зона», водитель обязан снизить скорость до 20 км/ч и быть предельно осторожным, ведь в этой зоне он теряет все свои преимущества. Согласно правилам, ни одно транспортное средство не должно создавать помехи для пешеходов, у которых действует право на перемещение по проезжей части.
Если водитель увидит знак, а также в случаях, когда его не будет, а авто будет подъезжать к такой зоне, необходимо уступить дорогу велосипедистам, пешеходам. Въезд в линию жилой зоны возможен только при необходимости: если живете в одном из домов или же приехали в гости, забрать ребенка из детсада, школы и т. п.
Подведем итоги
Чтобы не лишиться прав или же не получить штраф, следует соблюдать правила движения в жилой зоне, а именно:
- соблюдать скоростной режим в жилой зоне;
- уступать дорогу пешеходам и велосипедистам;
- соблюдать правила стоянки и парковки.

Соблюдая ПДД, водитель может быть уверенным в сохранности своего водительского удостоверения и в отсутствии штрафа. В наше время очень много машин, парковочных мест на всех не хватает и многие нарушают правила. И здесь выбор только за владельцем авто: платить штраф или же ссориться с соседями, с которыми нельзя поделить парковочное место.
ПДД 2020 | Движение в жилых зонах ПДД
ПДД 2019, 2020 с комментариями онлайн
17.1. В жилой зоне, то есть на территории, въезды на которую и выезды с которой обозначены знаками 5.21 и 5.22, движение пешеходов разрешается как по тротуарам, так и по проезжей части. В жилой зоне пешеходы имеют преимущество, однако они не должны создавать необоснованные помехи для движения транспортных средств.
Скорость движения ТС пределах жилой зоны ограничено 20км/ч, а водители ТС в любых случаях обязаны уступать дорогу пешеходам, движущимся по проезжей части в том числе и вне пешеходных переходов.
17.2. В жилой зоне запрещаются сквозное движение механических транспортных средств, учебная езда, стоянка с работающим двигателем, а также стоянка грузовых автомобилей с разрешенной максимальной массой более 3,5т вне специально выделенных и обозначенных знаками и (или) разметкой мест.
Стояночные площадки для грузовых автомобилей с разрешенной максимальной массой более 3,5т обозначаются знаком 6.4 «Парковка (парковочное место)» с дополнительной табличкой 8.4.1 и (или) дорожной разметкой.
17.3. При выезде из жилой зоны водители должны уступить дорогу другим участникам движения.
Жилая зона относится к прилегающей территории. Поэтому, выезжая из жилой зоны, водитель обязан пропустить и пешеходов, и другие ТС независимо от направления их движения.
17.4. Требования данного раздела распространяются также и на дворовые территории.
Дворовая территория (определение) – это пространство, ограниченное зданиями по периметру, внутри которого, как правило, размещаются детские площадки, места для отдыха, зеленые насаждения, местные проезды к домам, школам, детским садам и пр. В отличии от жилой зоны, дворовые территории не обозначаются дорожным знаком 5.21 и не имеют сети улиц местного значения и проездов. Но все ограничения на движение ТС действуют и на этих территориях.
В отличии от жилой зоны, дворовые территории не обозначаются дорожным знаком 5.21 и не имеют сети улиц местного значения и проездов. Но все ограничения на движение ТС действуют и на этих территориях.
Официального определения термину «Дворовая территория» в ПДД нет. Но дворы (жилая зона, не обозначенная знаком 5.21) относятся к прилегающей территории, на которой действуют настоящие Правила.
Более подробный комментарий к разделу 17 дан в одноименной статье Движение во дворах и жилых зонах.
Правила парковки автомобиля во дворе
Погода Курсы Конвертер валют ТВ-гид Гороскоп Фотохроника ГОСОРГАНЫ Президент Беларуси Совет Министров Совет Республики Палата представителей Конституционный суд Верховный суд Комитет государственногУправление городским движением | РНО / ЕГО
 Некоторые из наиболее распространенных методов показаны в поле дисплея ниже. Среди них компьютеризированное управление светофорами, также известное как Управление городским движением (UTC), стало нормой для больших городов. В сетях с плотной городской застройкой есть явные преимущества от использования компьютеров для согласования управления трафиком, чтобы сбалансировать потребности и потоки. Другие методы включают плановое управление дорожным пространством через назначение полос, контроль парковки, запреты поворота, системы улиц с односторонним движением и схемы приливных потоков.Особого внимания требуют потребности пешеходов, велосипедистов, пожилых людей. ( См. Безопасность уязвимых участников дорожного движения
Некоторые из наиболее распространенных методов показаны в поле дисплея ниже. Среди них компьютеризированное управление светофорами, также известное как Управление городским движением (UTC), стало нормой для больших городов. В сетях с плотной городской застройкой есть явные преимущества от использования компьютеров для согласования управления трафиком, чтобы сбалансировать потребности и потоки. Другие методы включают плановое управление дорожным пространством через назначение полос, контроль парковки, запреты поворота, системы улиц с односторонним движением и схемы приливных потоков.Особого внимания требуют потребности пешеходов, велосипедистов, пожилых людей. ( См. Безопасность уязвимых участников дорожного движения Общие меры по управлению городским движением
- уличное движение с односторонним движением
- кольцевых развязок и более сложных круговоротов
- сигнально-управляемые соединения (статические и управляемые автомобилем)
- связанный, синхронизированный по времени контроль светофора
- компьютеризированное управление зональной сигнализацией (с учетом трафика)
- пешеходных и велосипедных переходов сигнальная
- выделенный автобус, рулежные полосы, велосипедные полосы
- приоритет автобуса на светофоре
- парковочные системы
- Видеонаблюдение за трафиком
- «Автобусные ворота» и прочие системы контроля доступа
- плата за перегрузку
- полосы движения для транспортных средств с высокой посещаемостью и другие методы контроля полосы движения
- информационные системы парковки
- Информационная система для водителя на основе VMS
Проектирование городских дорожных сетей и управление ими — обширная тема.S(cjnlqsuzqlet2fjqbkuchfws))/WebFiles/Pics/ipdd/132.13.1.jpg)
Управление городского движения (UTC)
Компьютеризированные системы UTC позволяют изменять план сигналов в зависимости от изменяющихся условий движения. Системы динамического управления принесли существенные преимущества, в основном за счет улучшения средней скорости и сокращения времени в пути на 10–20%. В их число входят SCOOT (Великобритания), SCATS (Австралия), MOTION (Германия), PRODYN (Франция), UTOPIA (Италия) и STREAM (Япония). Слишком часто эти преимущества быстро сводятся на нет из-за роста трафика, в результате чего общественность может не осознавать масштаб выгод до тех пор, пока не произойдет серьезный сбой системы, приводящий к обширной перегрузке.( См. Управление городского движения )
Системы управления городским движением становятся «умнее», внедряя ИТС различными способами — например, мониторинг задержки движения и заторов, автоматическое обнаружение происшествий (AID), системы управления на основе знаний и динамическая оценка происхождения-назначения.
Также доступен ряд других дополнительных функций:
- автоматическое оповещение о неисправностях детекторов движения, контроллеров, линий связи и сигнальных ламп, что означает, что обслуживание может быть выполнено быстро и с меньшим временем простоя сигнала Параметры синхронизации сигнала
- , которые позволяют инженерам по управлению трафиком разрабатывать стратегии управления очередями для регулирования объемов трафика через критические перекрестки и ссылки — например, с помощью средств «стробирования» трафика, которые ограничивают количество номеров, входящих в уязвимые зоны.
- сигналов времени, которые могут быть адаптированы в реальном времени, чтобы дать активный приоритет общественному транспорту над другим трафиком
- сигнальные планы и стратегии управления, которые дополняются электронными панелями VMS, чтобы предупреждать о заторах и закрытых дорогах или обеспечивать знаки переменного направления
- системы контроля камеры, предотвращающие проезд на красный свет на перекрестках с высоким уровнем аварийности
- улучшенных методов обнаружения, которые позволяют адаптировать время сигнала и стратегии контроля для удовлетворения потребностей уязвимых участников дорожного движения, таких как велосипедисты и пешеходы
- Стратегии мониторинга и контроля загрязнения воздуха, связанные с экологическими целями
Стратегии управления движением
Стратегии управления дорожным движением больше не сводятся исключительно к увеличению пропускной способности транспортных средств. Они могут быть разработаны для достижения преднамеренного ограничения трафика — например, за счет очень высоких уровней приоритета шины за счет другого трафика или путем введения политик управления очередями и преднамеренного контроля доступа к области. Эти разработки дают транспортным инженерам и сетевым диспетчерам средства для реализации очень адаптируемой формы управления городским движением, отвечающей транспортной политике и приоритетам управления, а также их приемлемости для общественности и местных политиков.
Они могут быть разработаны для достижения преднамеренного ограничения трафика — например, за счет очень высоких уровней приоритета шины за счет другого трафика или путем введения политик управления очередями и преднамеренного контроля доступа к области. Эти разработки дают транспортным инженерам и сетевым диспетчерам средства для реализации очень адаптируемой формы управления городским движением, отвечающей транспортной политике и приоритетам управления, а также их приемлемости для общественности и местных политиков.
Общие полосы
Это предполагает использование полосы для различных функций в разное время дня — для движения транспорта или погрузки, разгрузки и парковки.Например, Барселона использует левую полосу оживленной пятиполосной артерии поочередно для движения транспорта, парковки и доставки материалов в разное время дня.
Разрешенное использование отображается системой VMS в начале полосы с ограниченным доступом и светодиодными индикаторами сменных сообщений (CMS) через определенные промежутки времени, чтобы указать, когда активна загрузка и разгрузка.S(x0lmsab5r4zs23a0fff2fziu))/WebFiles/Pics/ipdd/133.42.1.jpg)
Дорожки противотока
Встречные полосы движения на городских улицах, как правило, ограничены для проезда велосипедов, автобусов и такси. На высокоскоростных магистралях полоса встречного движения может быть зарезервирована только для автобусов или Bus Rapid Transit (BRT).
Ограничения поворота
Эта стратегия применяется к трафику, который поворачивает встречный поток движения на сигнальном перекрестке. В случае стран, которые едут по правой стороне дороги, это означает запрет на левый поворот на перекрестке. Когда движение идет налево, ограничения применяются к движению направо. Эта мера заключается в том, чтобы проезжать перекресток с разворотным движением и объезжать его по петле, чтобы можно было подъехать к перекрестку с другого направления.Таким образом устраняется перекрестное движение. Ограничения поворота иногда поддерживаются VMS, если они применяются только в определенное время дня.
Ограничение определенных перемещений может привести к изменению схемы движения и изменениям отдельных перемещений, которые являются источником раздражения для местных жителей или предприятий. Хотя для некоторых это неудобно — из-за необходимости разворота, изменения маршрута или других действий, — общая работа перекрестка значительно улучшается. Неудобство можно уменьшить, правильно выбрав места для разворотов вдоль коридора или используя «контур заземления» или «петлю для ручки-кувшина», хотя для этого потребуется дважды повернуть транспорт, чтобы пересечь перекресток.
Хотя для некоторых это неудобно — из-за необходимости разворота, изменения маршрута или других действий, — общая работа перекрестка значительно улучшается. Неудобство можно уменьшить, правильно выбрав места для разворотов вдоль коридора или используя «контур заземления» или «петлю для ручки-кувшина», хотя для этого потребуется дважды повернуть транспорт, чтобы пересечь перекресток.
Оптимизация сигналов трафика
Оптимизация сигналов трафика применяется в городских сетях уже много лет. Практика согласования светофоров на последовательных перекрестках для согласования движения взводов транспортных средств по «зеленой волне» является очень экономичным методом увеличения пропускной способности — сокращения задержек, остановок и расхода топлива. Но многие системы управления дорожным движением работают неоптимально, поскольку в большинстве городов необходимо регулярно проверять время прохождения сигнала, чтобы убедиться, что конкретное время перехода оптимизировано с учетом меняющейся структуры спроса.
Целью данной меры является адаптация работы сигналов трафика к потокам трафика или введение определенной политики регулирования, например приоритета шины. Это можно использовать на перекрестке, расположенном:
- на главной магистрали, которая подвержена колебаниям движения (пики связаны с сезонными поездками или поездками в выходные дни)
- на дороге, временно используемой в качестве запасного маршрута
- в районе, где стратегия управления движением меняется со временем
Процедура состоит из:
- анализ потоков трафика, которые необходимо адресовать
- сбор конкретных данных о дорожном движении (в частности, курсовых и поворотов)
- составление планов необходимых сигналов
- , реализующий их в контроллере сигналов, что может потребовать добавления оборудования дистанционного обнаружения или управления.
Использование микроскопических имитационных моделей позволяет быстро тестировать различные стратегии одновременно с визуализацией их воздействия — при количественной проверке соответствия различным критериям. Они могут включать общее время, проведенное автомобилем в сети, или время задержки для различных категорий пользователей.
Они могут включать общее время, проведенное автомобилем в сети, или время задержки для различных категорий пользователей.
Сигнальные планы можно активировать различными способами:
- вручную
- по расписанию
- с помощью автоматизированного устройства, которое может обнаруживать местные условия движения
- с помощью центральной системы, которая учитывает не только местные условия, но и условия трафика в зоне или даже во всей сети
Управление сигналами дорожного движения в городских районах должно учитывать потребности всех участников дорожного движения, включая пешеходов, двухколесные транспортные средства и общественный транспорт.Для этого требуется:
- мониторинг и правильное обслуживание оборудования для мониторинга и контроля трафика, особенно датчиков движения
- периодическая корректировка управления трафиком и / или политикой управления трафиком
- время от времени согласование чисто местных вопросов и проблем, связанных со сквозным трафиком
Adaptive Traffic Signal Control может устранить проблему повторной синхронизации и часто может достигать большей эффективности, поскольку системы регулируют синхронизацию фазы сигнала трафика цикл за циклом почти в реальном времени — по крайней мере, в течение некоторого времени. Традиционные стратегии управления по-прежнему необходимы в случаях, когда адаптивная система дает сбой или становится непригодной. Фиксированные планы могут быть полезны для круговоротов движения, где неожиданные модели спроса могут привести к «блокировке» круговорота таким образом, что требуется «план очистки», чтобы вернуть соединение в свободный поток.
Традиционные стратегии управления по-прежнему необходимы в случаях, когда адаптивная система дает сбой или становится непригодной. Фиксированные планы могут быть полезны для круговоротов движения, где неожиданные модели спроса могут привести к «блокировке» круговорота таким образом, что требуется «план очистки», чтобы вернуть соединение в свободный поток.
Железнодорожные и прочие переезды
Часто, когда поезда, разводные мосты или другие виды транспорта имеют приоритет при светофоре и перекрывают движение, отсчет времени подачи сигналов на ближайших перекрестках сохраняется, как если бы блокировки не произошло.Сроки сигнала должны быть скорректированы с учетом изменения маршрута, а система VMS должна быть развернута для предупреждения водителей о задержках. Стратегии адаптивного управления дорожными сигналами могут автоматически реагировать на эту ситуацию.
Адаптивное управление сигналами движения
Adaptive Traffic Signal Control касается компьютеризированных систем, которые адаптируются к фактическим измерениям трафика и ситуациям.S(fye1zj1w4bzk2s4d0xxnxnyz))/WebFiles/Pics/ipdd/7.6.1.jpg) Они могут сделать это либо путем онлайн-выбора заранее определенных планов управления, либо путем онлайн-расчета индивидуальных планов управления в режиме реального времени.Возможны комбинации двух. Адаптивные системы измеряют текущие условия трафика и динамически регулируют, сколько времени выделяется для различных потоков трафика, в соответствии с измеренными объемами трафика и длиной очереди. Их:
Они могут сделать это либо путем онлайн-выбора заранее определенных планов управления, либо путем онлайн-расчета индивидуальных планов управления в режиме реального времени.Возможны комбинации двух. Адаптивные системы измеряют текущие условия трафика и динамически регулируют, сколько времени выделяется для различных потоков трафика, в соответствии с измеренными объемами трафика и длиной очереди. Их:
- отрегулируйте общую длину циклов светофора на каждом перекрестке
- изменяет количество зеленого времени, присвоенное различным фазам сигнала на любом одном переходе (синхронизация сигнала «разделяется»).
- изменяет время смещения между зеленой фазой на последовательных переходах, чтобы минимизировать общие задержки.
В условиях насыщения более короткие циклы обычно обеспечивают большую пропускную способность трафика, поскольку сигналы обрабатывают очереди с максимальной скоростью обслуживания (называемой скоростью потока насыщения) для всех перемещений.
Поскольку адаптивные системы управления в некоторой степени «самооптимизируются», необходимость в согласовании таймингов сигналов в традиционном смысле отсутствует. Это связано с тем, что алгоритмы управления сигналами автоматически адаптируются к изменениям спроса (например, трафик отклоняется от дорожного происшествия), устраняя необходимость явных упреждающих корректировок в планах синхронизации сигналов. Разработки последних лет позволяют использовать стратегии «стробирования», которые делают упор на управление очередями, контролируя общий объем трафика, поступающего в сильно перегруженную зону.Эти стратегии зависят от экспертных систем и динамического моделирования.
По мере изменения режима транспортного потока могут меняться и операционные цели и приоритеты. Например, по мере увеличения потребности в трафике уровень обслуживания снижается до тех пор, пока потоки насыщения не будут достигнуты и не наступит перегрузка. Во время этого перехода цель управления может измениться от свободного потока к максимальному увеличению пропускной способности транспортного средства и, наконец, к управлению очередью.
Для городских магистральных сетей стратегии «стробирования» могут применяться для хранения очередей транспортных средств там, где они причиняют наименьший ущерб.Эти стратегии обеспечивают способ определения того, где должен храниться трафик в очереди, чтобы вызвать наименьшие нарушения, чтобы трафик свободно проходил в пределах стробируемой зоны. Также необходимо минимизировать влияние, которое трафик в очереди может иметь за счет «обратной блокировки», которая влияет на восходящие перекрестки.
Более сложные системы управления городским движением будут учитывать такие параметры трафика, как длина очередей на перекрестках, время в пути от пункта к пункту и задержки движения. Их можно измерить с помощью методов, основанных на ITS, таких как автоматические измерения длины очереди видео, автоматические показания номерных знаков и зондирование данных транспортного средства.
Важно понимать, что даже полностью адаптивные системы, как правило, не полностью автономны. Компетентный персонал диспетчерской с опытом управления дорожным движением по-прежнему необходим для решения сложных ситуаций, когда они возникают. Иногда лучший прогресс может быть достигнут с использованием традиционных процедур автономной оптимизации, чем предлагают автоматические системы. Кроме того, ни одна система светофоров не способна успешно справиться с перенасыщенным движением.
По мере того, как эффективность управления дорожным движением достигает своего практического предела, дальнейшие преимущества в управлении городскими поездками будут получены в основном за счет разработки политики управления спросом, вызывающей модальные и временные сдвиги (например, контролируемый доступ в городские районы, удаленная работа и совместное использование автомобилей).( См. Управление спросом)
Приоритет общественного транспорта
Современные системы UTC обычно включают в себя приоритетное управление общественным транспортом и транспортными средствами службы экстренной помощи — и все чаще информационные системы для путешественников, такие как маршруты парковки, занятость парковок, время прибытия следующего автобуса. ( См. Распространение информации)
Эта концепция упреждения светофора использует датчики и / или транспондеры для обнаружения транспортных средств общественного транспорта (трамваев или автобусов), приближающихся к перекрестку, и специальное программное обеспечение для управления одним из следующих пунктов:
- продлить время зеленого цвета, чтобы шина могла пройти, если сигналы уже зеленые, или
- изменяет сигналы от встречного движения в пользу автобуса по прошествии минимального времени зеленого цвета.
Это также стратегия управления спросом — поощрение использования общественного транспорта — и было показано, что она не создает необоснованных помех для других транспортных средств, тем самым улучшая общую пропускную способность. ( См. Управление спросом на транспорт)
Приливный поток
Центральные полосы городских магистралей иногда используются для движения транспорта в одном направлении утром и в противоположном направлении днем. Например, в Барселоне в Испании используются обратимые полосы движения, называемые «приливным потоком», на трех из семи полос главной артерии, которые контролируются СМС на подвесных порталах.Бирмингем (Великобритания) имеет аналогичное расположение на Aston Expressway. В других городах центральные полосы зарезервированы для скоростного общественного транспорта в периоды пиковой нагрузки. Повороты с перекрестным движением обычно запрещены, когда это использование активно, но разрешено в непиковое время — опять же, управляемое сигналами управления воздушной полосой движения.
Эти системы вводятся в эксплуатацию ежедневно в периоды пиковой нагрузки, когда возникают повторяющиеся перегрузки с доступной пропускной способностью в противоположном направлении (минимум одна полоса движения).Иногда это предполагает использование специального оборудования для перемещения центрального защитного барьера. Во многих схемах приливных потоков просто используются системы подписи, такие как знаки с изменяемым назначением полос движения, размещенные на порталах. Из практических соображений изменение направления полосы движения обычно производится в определенное время (каждый день в заранее определенные часы), хотя в нескольких городах США реализована концепция, которая позволяет более динамично менять направление движения полосы движения.
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследование
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
превышение скорости в жилых районах, 2-е издание
Проблема превышения скорости в жилых районах
Что это руководство включает и не охватывает
В этом руководстве рассматривается проблема превышения скорости в жилых районах, которая является одним из наиболее распространенных источников жалоб граждан. полиция.Руководство начинается с описания проблемы и анализа факторов, повышающих ее риски. Затем он определяет ряд вопросов, которые помогут вам проанализировать вашу местную проблему превышения скорости. Наконец, в нем рассматриваются меры реагирования на проблему и то, что о них известно из оценочных исследований и полицейской практики. §
Превышение скорости в жилых районах — это лишь один из аспектов более широкого набора проблем, связанных с превышением скорости и безопасностью движения. Это руководство ограничено рассмотрением конкретного вреда, причиняемого превышением скорости в жилых районах.Связанные проблемы, не рассматриваемые напрямую в этом руководстве, каждая из которых требует отдельного анализа, включают следующее:
Самый последний список текущих и будущих руководств см. На сайте www.popcenter.org
Общее описание проблемы
Повышение скорости в жилых районах часто является основной проблемой для общественных групп, в основном из-за предполагаемых рисков для детей. Тем не менее, поскольку превышение скорости должно конкурировать с другими проблемами за внимание полиции, проблемы, которые могут показаться гораздо более серьезными, полиция часто не выделяет на это много ресурсов.
Превышение скорости в жилых районах причиняет пять основных видов вреда:
- Заставляет граждан опасаться за безопасность детей
- Заставляет пешеходов и велосипедистов опасаться за свою безопасность
- Повышает риск ДТП
- Повышает серьезность травмы собственного пассажира (-ов) спидера и других водителей и пассажиров, пешеходов и велосипедистов автомобиль наезжает
- Это увеличивает шум от разгона двигателя и трения в шинах
Превышение скорости увеличивает риск аварий и травм по нескольким причинам :
- Водитель с большей вероятностью потеряет контроль над транспортным средством
- Оборудование безопасности транспортного средства менее эффективно на более высоких скоростях
- Расстояние, необходимое для остановки транспортного средства, больше
- Транспортное средство движется дальше за время, которое требуется водитель должен реагировать на опасность
- Сбои более серьезны на более высоких скоростях1
Fa ctors, способствующие ускорению работы в жилых районах
Понимание факторов, которые способствуют возникновению вашей проблемы, поможет вам сформулировать свои собственные вопросы анализа на местном уровне, определить хорошие меры эффективности, выявить ключевые моменты вмешательства и выбрать подходящие ответы.
Даже немного более высокая скорость может означать разницу между жизнью и смертью для пешеходов, сбитых транспортным средством. Сила удара, воздействующая на человеческое тело, на скорости 35 миль в час более чем на треть больше, чем на скорости 30 миль в час2. Каждое снижение средней скорости на 1 милю в час примерно на 5% снижает количество ДТП. 3
Спидеры участвуют в дорожно-транспортных происшествий4. Скорость является фактором, способствующим примерно одной восьмой из всех аварий и примерно одной трети всех аварий со смертельным исходом и аварий.5 Большинство аварий происходит в городских районах, хотя большинство смертельных случаев происходит на более удаленных автомагистралях. 6
Убеждения и отношение к превышению скорости
Многие культуры активно пропагандируют превышение скорости, создавая в целом положительный социальный имидж. В рекламе автомобилей часто изображается вождение, которое было бы небезопасно для обычных водителей на реальных дорогах. Большинство водителей не считают превышение скорости особо серьезным или опасным правонарушением, за исключением мест, где могут находиться дети7. Водители склонны переоценивать свои навыки вождения и недооценивать риски аварии.8 Водители, как правило, считают, что они могут проехать от семи до восьми миль в час сверх установленного ограничения скорости, даже если полиция не будет их цитировать.9 У хронических спидеров также выше вероятность попасть в аварии.10 и называются «авариями», а не «авариями», предполагая, что столкновения не являются виной водителя. Исследования, проведенные в Канаде и Австралии, а также в Соединенных Штатах, показали, что риск аварии для водителя возрастает прямо пропорционально тому, сколько раз полиция ссылалась на водителя за нарушение скорости в прошлом.11
Многие водители признают превышение скорости в жилых районах.12 Причины превышения скорости включают опоздание и желание наверстать потерянное время, незнание ограничения скорости и попытки не отставать от других транспортных средств.13 Самый важный фактор в определение скорости — это восприятие водителем дорожной обстановки и того, какая скорость является безопасной для вождения.14, § Каковы бы ни были конкретные причины водителей, похоже, они принимают взвешенные решения относительно скорости 15, создавая возможности для полиции изменять свои расчеты.§§
С более широкой точки зрения социальной политики снижение скорости должно быть сбалансировано с другими целями, такими как содействие здоровой экономике (что частично влечет за собой быструю доставку товаров и услуг), снижение загрязнения окружающей среды и содействие здоровому поведению (поощряя ходьбу, бег и езда на велосипеде) .16
Справочник по системам управления дорожным движением: Глава 7 Локальные контроллеры
Источник: Eagle Products
Рисунок 7-1.Контроллер модели 2070.
7.1 Введение
В этой главе представлена подробная информация о контроллерах светофоров на перекрестках, чтобы пользователь мог:
- Понять принципы работы контроллера,
- Ознакомьтесь с различными типами контроллеров, а
- Выберите контроллеры для конкретных приложений.
В таблице 7-1 представлены некоторые основные определения, используемые на протяжении всей главы, а в таблице 7-2 обобщены функции, выполняемые локальным контроллером.Таблица 7-3 суммирует два различных режима работы контроллера сигналов светофора — изолированный и скоординированный. Сигнал, работающий в изолированном режиме, также можно назвать свободным или нескоординированным.
| Условия | Определения |
|---|---|
| Контроллер в сборе | Полный электрический механизм, установленный в шкафу для управления сигнальная операция.Сборка контроллера обычно включает в себя шкаф. |
| Блок контроллера | Часть контроллера в сборе, которая выбирает и определяет время отображения сигналов. |
| Блок контроллера пересечения | Традиционное и оригинальное использование, чаще всего обозначаемое как трафик . Контроллер сигналов . |
| Специальный контроллер | Включает устройства для контроля использования полосы движения и другие приложения, не связанные с традиционное предоставление полосы отвода для транспортных средств и пешеходов на перекрестках или в средних кварталах. |
|
| Режим | Определения |
|---|---|
| Изолированный (бесплатный) | Контроллер сигнала определяет время назначения полосы отвода независимо других сигналов. Если задействована одна или несколько фаз, длина цикла может варьироваться от одного цикла к другому. |
| Скоординированный | Синхронизация контроллера сигналов согласована с синхронизацией одного или нескольких соседних светофоры, чтобы не останавливать приближающийся взвод автомобилей.Традиционно это включает в себя управление этим и соседними сигналами с одинаковой фиксированной длительностью продолжительность цикла. Адаптивные методы координации могут обеспечить координацию позволяя продолжительности цикла изменяться от одного цикла к другому. |
В следующем разделе этой главы рассматриваются блоки управления для приложений, отличных от сигналов светофора. См. Также главы 3 и 4 данного Руководства для получения дополнительной информации о некоторых специальных концепциях управления.
7.2 Типы операций
Несмотря на множество вариаций конструкции, светофоры можно классифицировать по типу эксплуатации как:
- Предварительное (или фиксированное время),
- с полным приводом и
- Полуактивный.
В Табл. 7-4 описаны характеристики и применение каждого из этих типов.
| Эксплуатация | Характеристики |
|---|---|
| Предварительно | Возникновение и продолжительность всех временных интервалов, как для транспортных средств, так и для пешеходов, во всех фазах предопределены. |
| Полностью активированный | • Все фазы активированы (т. Е. Используются датчики транспортных средств или пешеходов). • Фазы пропускаются (не обслуживаются), если нет транспортных средств или пешеходов. обнаружен. • Если обнаружены транспортные средства, но не пешеходы, только часть транспортного средства фазы могут быть обслужены. • Зеленый интервал фаз может варьироваться по продолжительности от минимального и максимальные значения, в зависимости от обнаруженной потребности в трафике.Когда автомобиль покидает детектор, зеленый цвет увеличивается на несколько секунд, известных как проход время или зеленое продление. Фаза завершается, если все детекторы фазы оставаться незанятым дольше, чем время «перерыва». • Интервал ходьбы обычно фиксированной продолжительности, но если сигнал согласовано, интервал ходьбы может быть увеличен, чтобы использовать предсказуемое дополнительное зеленое время, особенно для фаз главной улицы. • Другие интервалы (например, желтый, красный зазор, мигание Не Walk) имеют фиксированную продолжительность. |
| Полу-приводной | • Гарантированно обслуживается как минимум одна фаза, в то время как другие
активирован. • На этот этап отводится гарантированное или фиксированное минимальное время. • Если нет потребности в активированных фазах, гарантированная фаза остается зеленым дольше, чем «фиксированное» время зеленого цвета. • Если сигнал скоординирован, гарантированной фазой обычно является главная улица через фазу. Если задействованные фазы обрываются до использования всех их разделенное распределение, свободное время можно переназначить на гарантированный фазы, в результате чего он получает больше, чем «фиксированное» количество зеленый. |
Активированный сигнал светофора — это сигнал, в котором детекторы транспортных средств или пешеходов используются для активации определенной фазы (изменения цвета с красного на зеленый) только при наличии транспортных средств или пешеходов.После активации продолжительность зеленого дисплея может варьироваться в зависимости от количества обнаруженных транспортных средств.
Предусмотренные или фиксированные по времени фазы обслуживаются в течение фиксированной продолжительности каждый цикл независимо от количества присутствующих транспортных средств или пешеходов. Сигнал устанавливается заранее, если все фазы фиксированы, и полностью включается, если все фазы используют обнаружение. Полуавтоматический сигнал состоит из предварительно заданных фаз и фаз срабатывания.
Координированные сигналы часто работают в полуактивированном режиме.В этом случае сквозные фазы главной улицы не нуждаются в детекторах и обслуживаются каждый цикл независимо от спроса. Скоординированный сигнал должен работать с циклом фиксированной продолжительности. В типичном полу-активированном сигнале, если одна или несколько задействованных фаз не требуют всей выделенной им части цикла, неиспользованное время автоматически переназначается на незадействованные фазы главной улицы, которые всегда заканчиваются (становятся желтыми) в одна и та же точка цикла независимо от того, насколько рано они начинаются (становятся зелеными).
Большинство современных контроллеров светофоров поддерживают все эти типы сигналов. Даже несмотря на то, что сигнальный контроллер может обеспечивать функции срабатывания для всех фаз, любую или все фазы можно заставить работать в соответствии с заранее заданным временем с помощью входа «вызов не сработавшего» или с помощью таких параметров фазы, как возврат, минимальный зеленый и согласованное обозначение фаз.
7.3 Область применения
Типы работы сигнала
Таблица 7-5 суммирует применения описанных выше типов работы сигналов для каждой из следующих трех часто встречающихся сред перекрестков:
- Изолированный — сигнальный перекресток, который физически удален от других сигнализируемых перекрестков и, следовательно, не получает преимуществ от координации сигналов.
- Артериальная — это сигнальный перекресток, который является одним из ряда смежных сигнальных перекрестков вдоль магистральной дороги, и на котором действует координация, по крайней мере, в течение некоторого времени дня — обычно встречается в пригородных районах. Сетка
- — сигнальный перекресток, который является одним из ряда смежных сигнализационных перекрестков в сетке из довольно коротких кварталов, обычно встречающихся в старых городских районах с высокой плотностью населения и центральных деловых районах.
| Тип операции | Изолированный | Артериальная | Сетка |
|---|---|---|---|
| Предварительно | Обычно не подходит. | Подходит только в том случае, если всегда согласовано и объемы переулков высокий и последовательный. | Соответствующее |
| Полуактивный | Подходит только при постоянном интенсивном движении по основным улицам. | Подходит, если всегда согласовано. | Подходит для включения фаз левого поворота и других незначительных перемещений, и сигналы пешеходов в середине квартала. |
| Полностью активированный | Соответствующее | Подходит, если не всегда согласовано. | Обычно не подходит. |
| Параметр объема для задействованных фаз (см. Раздел 7.5) | Подходит для фаз только с детекторами, удаленными более чем на 40 метров (125 футов). | Подходит для фаз только с детекторами, удаленными более чем на 40 метров (125 футов). | Обычно не подходит, потому что низкая скорость означает меньшее смещение детектора назад. |
| Параметр плотности для задействованных фаз (см. Раздел 7.5) | Подходит для высоких скоростей, так как более высокий начальный зазор может уменьшить количество остановок. | Подходит для высоких скоростей, так как более высокий начальный зазор может уменьшить количество остановок. | Обычно не подходит из-за низких скоростей. |
Предусмотренное управление лучше всего подходит для мест, где трафик оказывается очень предсказуемым и постоянным в течение длительного периода времени, а соседние сигналы должны постоянно координироваться. Эти ситуации обычно встречаются в уличных сетях с плотной сеткой (1).
Полностью управляемая система управления обычно обеспечивает наиболее эффективную работу на изолированных перекрестках. Приняв решение установить светофор, сначала подумайте о полностью включенном управлении. Его способность реагировать на трафик регулирует длину цикла и фазы (разделения) в соответствии с меняющимися требованиями от цикла к циклу.Редко когда объемы приближающегося движения на изолированном перекрестке остаются предсказуемо постоянными в течение длительного периода. Поскольку все фазы обычно не достигают пика одновременно, не следует предполагать, что полностью активированный сигнал работает с фиксированной длиной цикла даже при высокой нагрузке на трафик.
Полностью управляемое управление применимо к множеству схем фазирования и обнаружения сигнала, начиная от простого двухфазного режима до 8-фазной конфигурации с двумя кольцами. Из-за возможности пропуска фазы 8-фазный контроллер с двойным кольцом может работать как базовый двухфазный контроллер в условиях небольшого движения; при отсутствии запроса блок контроллера игнорирует эту фазу и продолжает движение по кольцу в поисках исправной фазы (1).
Если активный сигнал всегда координирован, затраты на создание и обслуживание сигнала могут быть снижены за счет использования полуактивированного сигнала, при котором главная улица проходит через фазы в качестве заранее заданных фаз без детекторов транспортных средств.
Защищенная, защищенная / разрешающая и разрешающая работа
Транспортные операции должны быть направлены на устранение ненужных задержек на сигнальных перекрестках. Надлежащее использование режима защищенного / разрешающего и разрешенного движения обеспечивает одно из средств уменьшения задержки движения при левом повороте.
Обеспечьте отдельные фазы левого поворота только там, где это необходимо, потому что ненужные отдельные движения левого поворота увеличивают продолжительность цикла и задержки движения. Управление движением без отдельных операций левого поворота может минимизировать задержку для всех движений, включая левый поворот. Однако существуют условия, которые требуют защищенной / разрешающей операции или оправдывают защищенную (только) операцию. Асанте и др. предоставляет набор рекомендаций по защите от левого поворота (2). В отчете представлены рекомендации по:
- Обоснование некоторой формы защищенного фазирования левого поворота,
- Выбор типа защиты от левого поворота, и
- Порядок левых поворотов.
Постоянные переходы от одного типа операции к другому могут оказаться уместными, поскольку объемы трафика меняются с течением времени. Работа с трафиком также может изменяться с защищенной на защищенную / разрешающую или разрешающую работу, когда схемы трафика меняются в течение дня и / или недели.
При решении проблем с левым поворотом может быть важно предусмотреть карман для левого поворота для допустимых левых поворотов. Однако в некоторых случаях это потребует отказа от парковки возле стоп-линии, чтобы освободить место для дополнительной ширины, необходимой для кармана левого поворота.
Специальные элементы управления
В ряде приложений используются узлы контроллеров специального назначения с электрическим переключением сигнальной индикации наподобие контроллеров перекрестков. Некоторые из этих приложений включают:
- Проблесковые маячки для различного применения, например:
- Идентификация дорожных опасностей,
- Определение времени применения ограничений скорости,
- Идентификация опасности перекрестка с контролем остановки и
- Использование устройства визуального внимания с индивидуальными знаками остановки.
- Сигналы управления полосой движения (например, полосы с двусторонним движением),
- Знаки смены полосы движения на перекрестках,
- Сигналы передвижного моста и однополосные, двусторонние рабочие сигналы,
- Органы управления транспортным средством с превышением высоты во избежание повреждения конструкции из-за превышения высоты грузовыми автомобилями, и
- Звуковые сигналы пешеходов (3, 4, 5), издающие зуммер или чирикающий звук для начала интервала или фазы ходьбы для слабовидящих.
7.4 Контроллер Evolution
Развитие контроллеров светофоров идет параллельно с развитием смежных отраслей электронной промышленности. Аппаратное обеспечение блока управления сигналами эволюционировало со времен моторных дисков и блоков переключения распределительных валов до адаптации микропроцессоров общего назначения для широкого спектра перекрестков и специальных приложений управления.
В первые годы управления светофором практически единственными коммерчески доступными блоками управления были устройства электромеханического типа.Позже несколько производителей представили полу- и полноприводные контроллеры, оснащенные вакуумными ламповыми цепями для функций синхронизации. Инженер-транспортник отрегулировал интервал и синхронизацию фазы с помощью регуляторов на панели управления. Трансформаторы и вакуумные лампы в этих аналоговых блоках генерировали значительное количество тепла, что требовало принудительной циркуляции и фильтрации воздуха в шкафах контроллеров. Некоторые производители сохранили распределительные валы с электромагнитным приводом для переключения ламп, в то время как другие использовали многослойные поворотные переключатели с шаговым реле и герметизированные реле.Эти контроллеры характеризовали малый срок службы компонентов и временные отклонения.
Замена вакуумной лампы на транзистор представила низковольтную схему с лишь небольшой частью прежнего тепловыделения. Цепи сильноточного нагревателя и цепи высоковольтных пластин B, которые когда-то требовались для электронных ламп, ушли со сцены. В середине 1960-х годов транзисторные схемы впервые использовались для функций синхронизации и фазирования. Более низкие рабочие температуры увеличивают срок службы компонентов, а цифровая синхронизация обеспечивает точность синхронизации и устраняет колебания.В этот период производители также представили твердотельный переключатель нагрузки для цепей лампы. В течение 1960-х годов также преобладали большие различия в компоновке компонентов и оборудования от производителя к производителю. Конструкции варьировались от тех, в которых все компоненты синхронизации и фазирования были размещены на одной печатной плате, до тех, в которых использовались модульные, сменные фазовые и функционально-ориентированные конструкции.
Интегральная схема (ИС) оказалась следующим важным шагом в эволюции контроллеров, поскольку технология микрочипов значительно уменьшила размер компонентов.Эти очень маленькие микросхемы были соединены в цепи и запечатаны внутри оболочки IC, чтобы сформировать микропроцессор. Это развитие привело к созданию микрокомпьютеров — небольших, легких и недорогих устройств, используемых сегодня практически повсеместно.
Индустрия управления дорожным движением быстро включила микропроцессоры в новые конструкции контроллеров сигналов. Они используются во всех современных контроллерах светофоров.
Функциональность и характеристики современного контроллера сигналов определяются скорее программным обеспечением, чем аппаратными средствами.Один и тот же физический контроллер может работать совершенно по-разному при загрузке с другим программным пакетом.
Для современных контроллеров сигналов светофора разработаны различные стандарты, в том числе разработанные Национальной ассоциацией производителей электрооборудования (TS 2) и Caltrans, New York DOT и FHWA (модель 170). Эти стандарты и Advanced Transportation Controller (включая ATC 2070) обсуждаются в разделе 7.6.
7.5 Характеристики контроллера
Синхронизация сигналов и координация
Контроллеры сигналов светофора поочередно обслуживают конфликтующие движения транспорта.Это требует присвоения зеленого времени одному движению, затем другому. Если левые повороты имеют отдельные органы управления, и на сложных перекрестках может быть более двух конфликтующих движений. Продолжительность времени, необходимого для завершения одного раунда обслуживания для всех конфликтующих перемещений, называется длиной цикла, а распределение продолжительности цикла между конфликтующими движениями трафика называется разделением.
Для минимизации задержки движения желательно, чтобы взвод транспортных средств, выезжающих с одного перекрестка, прибывал на следующий перекресток во время зеленого дисплея.Это называется продвижением взвода и достигается путем координации действий соседних сигналов. Координация сигналов чаще всего достигается путем обработки соседних сигналов с одинаковой длиной цикла с заранее определенным смещением между началом цикла на одном пересечении и началом цикла на следующем. См. Главу 3 для дальнейшего обсуждения параметров синхронизации.
Продолжительность цикла, разделение и смещение может потребоваться изменить в течение дня по мере изменения объемов трафика.Таким образом, контроллеры позволяют пользователю устанавливать несколько наборов этих основных временных параметров координации. Каждый такой набор называется планом синхронизации или шаблоном синхронизации, и один план синхронизации или шаблон синхронизации действует в любой данный момент времени. Рабочий план или временная диаграмма могут быть изменены либо с помощью расписания по времени, хранящегося в контроллере, либо по команде от ведущего устройства.
Контроль интервала в сравнении с контролем фазы
Контроллеры сигналов движения, доступные сегодня, можно разделить на интервальные контроллеры (также называемые с предварительным расчетом времени) или фазовые контроллеры (также называемые активированными).Первые позволяют пользователю разделить цикл на любое количество интервалов, при этом продолжительность каждого интервала устанавливается пользователем. Затем пользователь определяет, какие выходные цепи в какие интервалы будут включены. Например, конкретный интервал может использоваться для измерения времени, когда часть зеленого цвета соответствует движению одного транспортного средства, часть мигающего сигнала не идет для пешеходного движения, желтый — для движения другого транспортного средства, а часть красного и постоянного света — нет. ходить для других.
Длина цикла равна сумме длительностей интервалов, и все интервалы рассчитываются по времени последовательно.Пользователь также может указать смещение начала цикла для координации сигналов. Продолжительность интервалов, определения выходных данных, длина цикла и смещение могут варьироваться от одного шаблона к другому и, следовательно, могут меняться в течение дня.
Современные контроллеры интервалов обычно также допускают определенную степень срабатывания, при этом выбранные интервалы могут быть пропущены, если нет потребности, или продолжительность выбранных интервалов может динамически изменяться в зависимости от срабатывания детектора. Если интервал не использует все выделенное ему время, свободное время можно назначить следующему интервалу.Некоторые контроллеры позволяют пользователю создавать довольно сложную индивидуальную логику для управления возникновением и продолжительностью интервалов.
Контроллеры фазыиспользуют другой подход к синхронизации сигналов. Они делят цикл на фазы, каждая из которых имеет пять заранее определенных интервалов — зеленый, желтый и красный разрешения для управления транспортным средством; и ходьба и мигание не предназначены для пешеходов. Пользователь указывает продолжительность каждого из этих интервалов или, в случае зеленого интервала, минимальную и максимальную продолжительность.Если сигнал скоординирован, пользователь также указывает время разделения для каждой фазы и смещение начала цикла.
Пользователь назначает фазу набору совместимых движений транспортных средств и пешеходов. Если согласовано, время разделения для всех фаз в кольце должно в сумме равняться длине цикла. Каждой фазе назначено временное кольцо (рисунки 7-2 и 7-3). Фазы назначаются на одно и то же время звонка последовательно, но время звонка одновременно. Следовательно, если контроллер использует два кольца, две фазы могут синхронизироваться одновременно и независимо.
Контроллеры фазиспользуют барьеры или группы параллелизма фаз для определения конфликтов между фазами в различных элементах. Внутри группы параллелизма (между двумя барьерами) фазы в разных кольцах могут синхронизироваться независимо, но все кольца должны пересекать барьер (переходить в другую группу параллелизма фаз) одновременно.
В группе параллелизма (между двумя барьерами) пользователь может указать желаемый порядок (последовательность), в котором должны обслуживаться фазы в одном кольце. От одного шаблона к другому пользователь может изменять длину цикла, смещение, разделение и последовательность фаз.
Фазовое управление особенно хорошо подходит для управляемого управления на обычных перекрестках, особенно с защищенными движениями левого поворота. Две задействованные фазы левого поворота на одной и той же улице могут синхронизироваться независимо, при этом, скажем, фаза поворота на запад получает меньше времени, чем на восток в одном цикле, а противоположное происходит в следующем цикле. По этой причине, а также благодаря простоте настройки и дополнительным функциям срабатывания фазовые контроллеры стали доминирующим типом.
Рисунок 7-2.Последовательность фаз трехфазного контроллера для однокольцевого контроллера.
Рисунок 7-3. Последовательность фаз для контроллера с двойным кольцом.
В течение многих лет контроллеры фаз были ограничены восемью фазами, распределенными по двум кольцам в фиксированной конфигурации. Это очень хорошо работает для большинства перекрестков, но не обеспечивает гибкости, необходимой для необычно сложных перекрестков. Кроме того, если фиксированного времени достаточно и фазировка левого поворота не является распространенной, как это часто происходит в центральных деловых районах больших городов, контроллер интервала подойдет.Таким образом, контроллеры интервалов остались в использовании, хотя их количество сокращается по мере того, как контроллеры фаз расширились, чтобы вместить больше фаз и колец, и добавили такие функции, как перенаправление выходов. Каждая фаза в фазовом контроллере может управляться либо заранее (фиксированное время), либо активироваться.
Стандарт TS 2 Национальной ассоциации производителей электрооборудования (NEMA) определяет минимальные функциональные стандарты как для интервальных, так и для фазовых контроллеров. Большинство современных контроллеров соответствуют большинству или всем этим минимальным требованиям, и большинство контроллеров также предоставляют дополнительные функции, которые еще не стандартизированы.
Компоненты контроллера и шкафа
Большинство современных контроллеров светофоров имеют следующие основные аппаратные компоненты:
- Пользовательский интерфейс (клавиатура и дисплей)
- Центральный процессор (микропроцессор, память и т. Д.)
- Разъемы для внешней связи (последовательные порты, Ethernet, USB, проводка шкафа и т. Д.)
- Источник питания (преобразует 110 В переменного тока в 24 В, 12 В, 5 В постоянного тока для внутреннего использования)
- Дополнительный дополнительный процессор последовательной связи (FSK-модем, RS 232)
Порты последовательной связи часто используются для установления связи с главным блоком управления или компьютером.Такие соединения могут быть постоянными с удаленным главным компьютером или компьютером или временными с портативным компьютером, используемым полевым персоналом. Вместо последовательной связи все чаще используется Ethernet. Поскольку специальный последовательный порт может использоваться для связи с оборудованием внутри шкафа в случае шкафа с последовательной шиной (см. Разделы NEMA TS 2 и ATC ниже).
Внутри шкафа контроллера сигналов, подключенных к контроллеру, находятся следующие основные вспомогательные компоненты, которые взаимодействуют с контроллером:
- Блок управления неисправностями (также называемый монитором конфликтов)
- Детекторы транспортных средств и пешеходов (блоки датчиков, выключатели цепи)
- Драйверы выходной цепи (отображение сигналов управления переключателями нагрузки)
- Дополнительные внешние устройства связи (внешний FSK-модем, оптоволоконный трансивер, беспроводной трансивер, коммутатор Ethernet и т. Д.)
Извещатели используются только для сработавших сигналов. Выключатель нагрузки использует низковольтный выход постоянного тока контроллера для включения или выключения цепи 110 В переменного тока, таким образом, включая или выключая отображение сигнала, видимое автомобилистами или пешеходами. Для определенной фазы одна цепь отключается, как и другая.
Блок управления неисправностями (MMU) может быть сконфигурирован для проверки наличия противоречивых индикаций сигналов и различных других неисправностей, включая отсутствие выхода состояния ОК от контроллера (выход сторожевого таймера), короткие или отсутствующие интервалы зазоров и выходящие за допустимые пределы рабочие напряжения. .Если обнаружена неисправность, MMU автоматически переводит сигнал в состояние полностью красного мигания, подавляя выходы контроллера. Современные контроллеры могут определять это состояние и сообщать о неисправности главному или центральному компьютеру.
Выбор шаблона
Современные контроллеры предлагают следующие три альтернативных метода определения того, какой образец или план работы:
Внутреннее расписание по времени — пользователь настраивает расписание, которое сообщает контроллеру, когда следует изменить шаблон или план, в зависимости от дня недели и времени суток.Можно создать специальное расписание для праздников или других дат, когда условия дорожного движения необычны. Часы контроллера, которые отслеживают дату, день недели и время, регулярно сравниваются с записями в расписании. Никаких внешних коммуникаций не требуется. Этот механизм часто используется в качестве резервного, когда метод выбора внешнего шаблона не работает. Этот метод широко используется.
Жесткое межсоединение — несколько электрических проводов (обычно семь), проложенных между контроллером и главным блоком, имеют постоянное напряжение, подаваемое или отключенное, чтобы указать, какой шаблон или план следует использовать.Когда изменяется комбинация активных (напряжение включено) и неактивных (напряжение выключено) проводов, эта комбинация используется контроллером для поиска схемы или плана перехода. Традиционно этот метод использовался для независимого выбора того, какую из нескольких предопределенных длин цикла, смещения и разделения использовать, таким образом имитируя выбор клавиш набора, смещения и разделения в электромеханическом контроллере. Использование этого метода сокращается.
Внешняя команда — используя цифровую связь (обычно через последовательный порт или порт Ethernet на контроллере), главный блок или компьютер отправляет командное сообщение контроллеру, инструктируя его перейти на определенный шаблон.Этот метод широко используется. Если контроллер теряет связь с источником команд шаблона, он может автоматически вернуться к использованию своего внутреннего расписания выбора шаблона для времени суток. Один и тот же канал связи обычно используется для получения информации о состоянии от контроллера и для удаленного изменения параметров контроллера.
Пользователь также может вручную заблокировать контроллер в соответствии с определенным шаблоном, так что любой из вышеперечисленных вариантов выбора шаблона игнорируется.
Синхронизация для координации
Координация сигналов требует, чтобы все контроллеры в скоординированной группе имели общую временную привязку, чтобы смещения начала цикла применялись точно. До того, как в контроллерах появились внутренние часы, это обычно достигалось подключением контроллеров к главному устройству с использованием метода проводного межсоединения, описанного выше. Один раз в каждом цикле один из входных проводов меняет свое состояние на секунду или две (называется импульсом), тем самым сигнализируя о начале фонового цикла всем подключенным контроллерам одновременно.Затем каждый контроллер умножает собственное смещение от этой общей контрольной точки. Использование этого метода проводного межсоединения сокращается в пользу координации временной базы.
Сегодня в контроллерах есть внутренние часы, способные сохранять достаточно точное время в течение как минимум нескольких дней. Все контроллеры в координационной группе могут быть настроены на использование одного и того же времени дня (например, полуночи) в качестве контрольной точки для расчета смещения. Предполагается, что общий фоновый цикл начинается в это время суток, и каждый контроллер может рассчитать свое собственное смещение от этой общей контрольной точки.Это называется согласованием временной базы.
В конце концов, однако, часы контроллера будут дрейфовать, и их необходимо будет установить на стандартное время. Часы можно сбросить любым из следующих способов:
Руководство — периодически пользователь подходит к контроллеру в поле и сбрасывает время в соответствии с точно установленными часами или другим источником стандартного времени (например, отображение времени сотового телефона, телефонный звонок на голосовое время и т. Д.). Этот метод не приветствуется, поскольку он трудоемок, подвержен ошибкам и может быть небрежным.В зависимости от модели контроллера существенный дрейф может потребовать ручного сброса всего лишь через несколько недель работы.
Hardwire pulse — ведущее устройство подает импульсный сигнал на проводной вход контроллера в заранее определенное время суток. Когда контроллер улавливает этот импульс, он устанавливает часы на заранее определенное время дня. Пока все контроллеры в скоординированной группе получают один и тот же импульс, не имеет значения, если часы ведущего устройства не совсем точны.
Внешняя команда — используя цифровую связь (обычно через последовательный порт или порт Ethernet на контроллере), главный блок или компьютер управления сигналами движения отправляет команду контроллеру (скажем, один раз в день), давая ему команду немедленно установить часы до времени, указанного в сообщении. Можно координировать даже сигналы, управляемые разными центральными компьютерами, если на каждом центральном компьютере точно установлены часы.
Сторонний источник времени — стандартный источник времени, такой как радиоприемник WWV, монитор времени сотового телефона или подключение к Интернету, установлен в шкафу, и контроллер либо прослушивает периодические обновления времени вещания, либо периодически инициирует запрос для обновления времени с сервера времени.
Работа с активированным контроллером
Независимо от аппаратного стандарта, которому соответствует контроллер (NEMA, ATC или Model 170), функциональность резидентного программного обеспечения аналогична и обычно работает в соответствии со стандартом NEMA TS 2.
Основные временные характеристики управляемых блоков управления следующие:
- Каждая фаза имеет предварительно установленный минимальный интервал между зелеными сигналами, чтобы обеспечить время старта для стоящих транспортных средств.
- Зеленый интервал продлевается для каждого дополнительного срабатывания транспортного средства после истечения минимального интервала зеленого цвета при условии, что не возникает перерыва в движении, превышающего текущую настройку продления устройства.
- Предварительно установленный максимальный предел зеленого расширения. Контроллеры предоставляют два выбираемых максимальных предела (обычно называемых MAX I и MAX II).
- Интервалы смены желтого и красного цвета предустановлены для каждой фазы. Красный зазор нужен не всегда.
В дополнение к входам датчиков, каждая фаза снабжена средствами, позволяющими пользователю постоянно звонить в службу технического обслуживания автомобиля (минимальный или максимальный вызов зеленого цвета) или для обслуживания пешеходов (вызов пешеходов).Максимальный повторный вызов зеленого цвета вызывает вызов для фазы и при обслуживании предотвращает его завершение до истечения максимального зеленого таймера.
Таймер максимального зеленого света на соответствующей фазе не начинает отсчет времени до тех пор, пока не сработает исправный детектор противостоящей фазы. Следовательно, фаза с постоянным спросом может оставаться зеленым в течение некоторого времени, прежде чем будет зарегистрирован конфликтующий вызов, который запускает отсчет максимального зеленого цвета.
Принципы управления фазой, относящиеся к кольцам и барьерам, описаны в таблице 7-6, а основные параметры синхронизации описаны в таблице 7-7.
| Элемент | Описание |
|---|---|
| Блок контроллера с одним кольцом | Содержит от 2 до 4 последовательно синхронизированных и индивидуально выбранных конфликтующих фазы расположены в установленном порядке или последовательности. Фазы могут пропускаться в 3-х и 4-х фазных контроллерах. Фазы в кольце пронумерованы. как показано на Рисунке 7-2. |
| Контроллер с двумя кольцами | Содержит 2 взаимосвязанных кольца, упорядоченных по времени в предпочтительной последовательности. и разрешить одновременную синхронизацию соответствующих фаз в обоих кольцах, при условии к ограничению барьеров (линий совместимости). Каждое кольцо может содержать до двух фаз в каждой из двух барьерных групп, всего восемь фазы. Затем каждая из соответствующих фазовых групп должна пересечь барьер. одновременно для выбора и времени фазы в группе фаз на другом боковая сторона.Фазы в 2 кольцах синхронизации пронумерованы, как показано на Рисунок 7-3. |
| Блок контроллера с несколькими кольцами | Контроллер, поддерживающий более восьми фаз и двух колец. Любой номер фаз, до максимума, поддерживаемого контроллером, можно расположить в любом количестве колец. Конфликты между фазами в разных кольцах задается либо с помощью барьеров, вставленных между группами фаз, либо с помощью фаз Списки параллелизма Этот документ не был проверен в поле.Я бы не рекомендую включать его сюда, если явно не включен отказ от ответственности. |
| Барьер (строка совместимости) | Контрольная точка в обозначенной последовательности двойных и мульти-кольцевых блоки контроллеров, на которых кольца заблокированы. Барьеры гарантируют конфликт фазы не будут выбираться или время одновременно. У барьера кольца заканчиваются текущую фазу и одновременно пересекают барьер, как показано на Рисунок 7-3. |
| Двойной вход | Режим работы в контроллерах с двойным кольцом и с несколькими кольцами в какая одна фаза в каждом кольце должна быть в рабочем состоянии. Если звонка не существует в одном из колец при переходе через барьер (из другой фазовой группы), в этом кольце выбирается фаза, которая будет активирована контроллером в предопределенным образом. Например, снова обратившись к рис. 7-3 в отсутствие вызовов на Фазах 7 и 8, Фазах 2 и Фазах 6 завершение обслуживания звонок на Фазе 3.Программирование для двойного входа определяет, будет ли фаза 7 или Фаза 8 будет выбрана и рассчитана одновременно с Фазой 3, даже если нет вызова ни на Фазе 7, ни на Фазе 8. |
| Однократный вход | Режим работы в контроллерах с двойным кольцом и с несколькими кольцами в который фаза в одном кольце может быть выбрана и рассчитана отдельно, когда есть нет потребности в обслуживании неконфликтной фазы в другом кольце.Например, как показано на рисунке 7-3, после завершения фазы 2 и фазы 6 блок контроллера будет обслуживать вызов на Фазе 3 при отсутствии вызовов на либо фаза 7, либо фаза 8. Пока выбрана и рассчитана только фаза 3, фазы 7 и 8 (в кольце 2) останутся в красном состоянии. |
| Настройка | Описание |
|---|---|
| Минимум зеленый | Абсолютная минимальная продолжительность зеленой индикации фазы.Фаза не может быть выдвинут или вынужден выключиться в течение этого интервала. |
| Переменный начальный зеленый | Время, рассчитанное по количеству срабатываний датчика приближения во время красный. При отсутствии детектора стоп-сигнала это дает достаточно времени для служебные автомобили стояли в очереди между стоп-линией и детектором опережения. В фаза не может прерываться или быть принудительной в течение этого интервала. Продолжительность этого интервала зависит от связанных параметров, включая добавленный начальный (количество зеленого, добавляемого за срабатывание) и максимальное начальное значение. |
| Пешеходная прогулка | Минимальная длительность индикации пешеходного перехода. Фаза не может быть выдвинут или вынужден выключиться в течение этого интервала. |
| Доступ для пешеходов | Фиксированная продолжительность мигающего индикатора «Не ходить» для пешеходов. Фаза не может прерваться или быть вынужденной (за исключением железнодорожных или аварийных ситуаций). упреждение транспортного средства) в течение этого интервала. |
| Зеленый внутренний номер | Количество времени, на которое продлевается зеленый свет после обнаружения транспортного средства. Если срок действия минимального зеленого, переменного начального зеленого, прогулки и FDW истек, и в настоящее время вход датчика приближения не включен, фаза зеленого цвета может исчезнуть (разрыв), если временной интервал между идущими подряд транспортными средствами превышает зеленый время продления плюс время, в течение которого вход датчика остается включенным, пока автомобиль ощущается. |
| Максимум зеленый | Даже если транспортные средства все еще приближаются, фаза зеленого будет прекращена (принудительно выключен) по истечении этого общего времени зеленого цвета после вызова сервис на конфликтной фазе. Этот параметр имеет приоритет над зеленым расширением, но ни один из других параметров выше. |
| Желтый зазор | Фиксированная продолжительность желтой индикации, которая всегда следует за зеленой индикация. |
| Красный зазор | Время, в течение которого завершающаяся фаза и последующие конфликтующие фаза (ы) перед началом, одновременно отображается красный индикатор. |
Одна или несколько задействованных фаз также могут использовать параметры объема и / или плотности, каждая из которых является дополнением к базовой управляемой операции, как показано ниже.
- Опция «объем» увеличивает начальный интервал зеленого таймера каждый раз, когда обнаруживается транспортное средство, когда фаза красная.Минимальный зеленый цвет рассчитывается как большее из нормального минимального зеленого, и это вычисленное начальное значение зеленого до максимума. При отсутствии детекторов стоп-сигнала его можно использовать для подсчета количества транспортных средств, ожидающих перед детекторами опережения, и при необходимости увеличить минимальный зеленый цвет, чтобы очистить эту очередь.
- Опция «плотность» уменьшает время перерыва, пока фаза зеленая, если на других фазах ждут (были обнаружены) автомобили или пешеходы. Разрыв постепенно сокращается с течением времени, что требует все большей плотности приближающегося трафика, чтобы избежать прерывания грина.
Контроллер с двойным кольцом позволяет изменять последовательность фаз левого поворота. В таблице 7-8 и на рисунке 7-4 описаны варианты последовательности фаз для сигнала с нечетными пронумерованными фазами, обслуживающими левые повороты, и четными пронумерованными фазами, обслуживающими встречные движения посредством движения. Типичные варианты последовательности левого поворота — впереди налево, вперед-назад налево и отстают налево. Одна такая последовательность может использоваться на одной улице (одна группа барьеров), в то время как другая последовательность может использоваться на другой улице.
| Последовательность | Описание |
|---|---|
| Передний левый поворот | Последовательность начинается с фаз 1 и 5, противоположные ходы движутся вместе. Когда потребление заканчивается или достигается максимум зеленого цвета на Фазе 1 или Фазе 5, соответствующий левый поворот прекращается после соответствующего изменения и зазора интервалы, и дано противоположное сквозное движение (Фаза 2 или Фаза 6) зеленая индикация одновременно с сопровождающим его левым поворотом.Как спрос заканчивается или достигается максимум зеленого цвета на оставшемся левом повороте, это прекращается после соответствующих интервалов замены и зазоров, а его противодействующее сквозное движение освобождается. Затем фазы 2 и 6 выполняются вместе, пока спрос заканчивается или достигнуто максимальное время зеленого цвета для обеих фаз. Фазы затем, после отображения правильных интервалов замены и зазоров, прекратить одновременно на преграде. Как показано на рисунке 7-4, вышеуказанный этап последовательность также применяется к фазам за барьерной линией (Фазы 3, 4, 7 и 8) в группе других фаз. |
| Опережение-отставание, левый поворот | Последовательностьначинается с фазы 5, поворота налево и сопровождающей его фазы. 2 движутся одновременно. Когда потребность заканчивается или достигается максимум зеленого цвета на фазе 5, этот левый поворот заканчивается после соответствующих интервалов замены и зазоров. Противоположное сквозное движение, Фаза 6, переходит в Фазу 2. Как спрос заканчивается или достигается максимум зеленого цвета для Фазы 2, он прекращается после надлежащие интервалы замены и зазоров на линии барьера.Как показано на рисунке 7-4 вышеуказанная последовательность фаз также применяется к фазам за пределами барьерная линия (фазы 3, 4, 7 и 8) в другой фазовой группе. Также, Следует отметить, что любой из противоположных левых поворотов в каждой фазовой группе может вести чередование фаз. |
| Отставание левого поворота | Последовательность начинается с встречных сквозных движений, Фазы 2 и 6. По запросу заканчивается или достигается максимум зеленого на одном из сквозных движений, эта фаза (2 или 6) прекращается после соответствующих интервалов замены и зазоров, и его противоположный левый поворот (фаза 1 или 5) отпускается для одновременного запуска с сопутствующим сквозным движением эта фаза (2 или 6) завершается после правильные интервалы замены и зазора, и его противоположный левый поворот (1 или 5) выпущен.Оба левых поворота работают вместе до тех пор, пока потребление не закончится или не достигнет максимума. зеленый цвет на последней выпущенной фазе. Затем этапы 1 и 5 завершаются. одновременно после соответствующих интервалов замены и очистки шлагбаума линия. Как показано на рисунке 7-4, указанная выше последовательность фаз также применима к фазы за линией барьера (фазы 3, 4, 7 и 8), в другой фазе группа. |
Рисунок 7-4. Варианты базовой последовательности фаз с двойным кольцом
Любая из этих последовательностей может работать в любое время или может меняться в течение дня при изменении временной схемы.Однако последовательность фаз необходимо выбирать с осторожностью, если левый поворот может быть защищен и разрешен, и используется традиционная пятисекционная сигнальная головка (две стрелки левого поворота и три шарика). В этом случае последовательность фаз, включающая запаздывание фазы левого поворота, либо левые повороты с опережением и запаздыванием, либо запаздывающие левые повороты, может привести к потенциально опасной ситуации, известной как «ловушка левого поворота». Автомобилист, разрешительно поворачивая налево и ожидая перерыва в движении встречного транспорта, видит, что зеленый шар превращается в желтый.Водитель предполагает, что встречный транспорт также видит желтый шар и останавливается, тогда как на самом деле встречный транспорт может продолжать видеть зеленый шар и не останавливаться. Эта проблема устраняется мигающей желтой стрелкой для защищенного / разрешенного управления поворотом. В этом случае разрешающая индикация (мигающая желтая стрелка) отслеживает сквозную фазу в противоположном направлении вместо сквозной фазы в том же направлении.
Стандарт TS 2 определяет различные входы внешнего управления для контроллера, которые изменяют его нормальное поведение.Они сгруппированы в три категории:
- Входов на фазу (см. Таблицу 7-9)
- Входов на кольцо (см. Таблицу 7-10)
- Входы на блок контроллера (см. Таблицу 7-11)
Фазирование, отличное от восьмифазного двойного кольца
Многие современные контроллеры или пакеты программного обеспечения контроллеров предлагают шестнадцать или более фаз в четырех или более кольцах и восемь или более перекрытий, что позволяет управлять многочисленными движениями трафика, требующими отдельных фаз или перекрытий и более чем обычная восьмифазная логика с двумя кольцами .Некоторые примеры нестандартного фазирования, используемого для управления двумя близко расположенными пересечениями, обсуждаются в Разделе 3.9 и в следующем разделе, посвященном перестановкам алмазов.
Даже на перекрестках, использующих только восемь фаз и два кольца, может применяться нестандартная логика. Одним из примеров является условное повторное обслуживание передней фазы левого поворота после ее проходной встречной фазы (см. Рисунок 7-5) — фаза левого поворота появляется дважды в цикле, как до, так и после ее встречной проходной фазы, но только если проходная движение достаточно легкое.Другим примером является логика «разделенных фаз», которая может использоваться, например, для предотвращения одновременного выполнения фазы переднего левого поворота с фазой запаздывающего левого поворота на одной и той же улице, если два поворота физически конфликтуют в середине перекрестка. .
| Вход | Описание |
|---|---|
| Вызов детектора транспортных средств | Вводит запрос транспортного средства на обслуживание в соответствующую фазу блок управления. |
| Вызов детектора пешеходов | Вводит запрос пешехода на услугу в соответствующую фазу блок управления. |
| Удерживать | Команда, сохраняющая существующую полосу отвода и имеющая разные ответы,
следующим образом, в зависимости от работы в транспортном средстве, не включенном или приведенном в действие
Режим:
|
| Пропуск фазы | Команда, которая вызывает пропуск фазы даже при наличии запроса, путем подачи внешнего сигнала, влияющего на выбор фазы.Пропуск продолжается до тех пор, пока сигнал не будет снят. Фаза, которую следует пропустить не отправляет конфликтующий вызов на любую другую фазу, но принимает и сохраняет звонки. Активация Phase Omit не влияет на фазу процесса сроков. |
| Пропуск пешехода | Команда, запрещающая выбор фазы из-за пешехода вызвать на этапе субъекта, и он запрещает обслуживание этого пешехода вызов.В активном состоянии функция Pedestrian Omit предотвращает запуск пешехода. движение предметной фазы. После начала предметной фазы зеленый, пешеходный вызов обслуживается или перерабатывается только при отсутствии исправный конфликтующий вызов и с функцией Pedestrian Omit на неактивной фазе. Активация этого входа не влияет на движение пешеходов в процессе сроков. |
| Вход | Описание |
|---|---|
| Force-Off | Команда, обеспечивающая завершение зеленого таймера или удержания ХОДУ в неактивном режиме активной фазы в ГРМ. Такое прекращение при наличии исправного конфликтного вызова. Форс-офф не действует при начальном разрешении, ПРОХОДЕ или пешеходном разрешении.Force-Off действует только до тех пор, пока сохраняется входной сигнал. |
| Red Rest | Требует, чтобы блок управления оставался красным во всех фазах отсчета времени. кольцо (а) при непрерывном приложении внешнего сигнала. Регистрация исправного конфликтующего вызова приводит к немедленному продвижению из Красный Остаток на зеленый — требовательная фаза. Регистрация исправного конфликтующий вызов до перехода в состояние Red Rest приводит к прерыванию активной фазы и выбор следующей фазы обычным способом, с соответствующими интервалами замены и очистки.Регистрация исправного вызвать активную фазу перед переходом в состояние красного покоя даже при применяется этот сигнал, приводит (если активен Red Revert) к продолжению окончания активной фазы с соответствующим интервалом смены желтого цвета и красный дисплей для продолжительности, выбранной в Red Revert. Ранее действовавшие затем перераспределяется фаза отвода. |
| Запрет максимального завершения | Отключает максимальные функции завершения всех фаз в выбранной ГРМ.Этот вход, однако, не препятствует отсчету максимального значения. Зеленый. |
| Пропустить красный зазор | Вызывает пропуск временных интервалов красного зазора |
| Утилизация пешеходов | Управляет повторным использованием пешеходного движения. Операция зависит
от того, работает ли фаза в активированном или неактивном режиме:
|
| Время остановки | При активации вызывает прекращение синхронизации звонка блока контроллера для продолжительность такой активации.После снятия активации с этого входа, все части, которые рассчитаны, возобновят отсчет времени. Во время остановки признаются срабатывания на незеленых фазах; срабатывания транспортных средств на зеленом фаза (ы) сбрасывают таймер времени прохождения обычным способом, а контроллер блок не завершает какой-либо интервал или часть интервала и не выбирает другой фазы, за исключением активации входа Interval Advance. Операция Интервал вперед с активированной остановкой времени очищает все сохраненные вызовы на фазе, когда блок управления продвигается через зеленый интервал этого этапа. |
| Максимум II (выбор) | Позволяет выбрать альтернативную настройку максимального времени для всех фаз кольца ГРМ |
| Вход | Описание См. Раздел 3.5.5.5 стандарта NEMA TS2 (6) | .
|---|---|
| Интервал ввода вперед | Полная операция включения-выключения этого входа, которая вызывает немедленное отключение. интервала в процессе отсчета времени.Когда существует одновременный интервал синхронизации, использование этого входа вызывает немедленное завершение интервала, что завершить следующий без такого срабатывания. |
| Разрешение ручного управления | Вызов транспортных средств и пешеходов на всех этапах, блок управления остановками отсчет времени во всех интервалах, и запрещает работу Interval Advance ввод при замене автомобиля и интервалы клиренса |
| Вызов в неактивный режим (Два на блок управления) | При активации вызывает работу всех фаз, соответствующим образом запрограммированных. в нерабочем режиме.2 входа обозначены как вызов не сработавшего Режим I и переход в режим без срабатывания II, соответственно. Только фазы оборудованы для пешеходной службы использовать в неактивном режиме. |
| Внешний минимум Отзыв для всех фаз автомобиля | Возникает постоянный спрос на все фазы транспортного средства на минимальное обслуживание транспортного средства |
| Внешний запуск | Возвращает блок контроллера к запрограммированной инициализации. фаза (ы) и интервал (ы) после подачи сигнала.После удаления после этого входа блок контроллера начинает нормальный отсчет времени. |
| Модификатор подставки для ходьбы | При активации изменяет только режим без срабатывания. После активации невыполненная фаза (-ы) остаются в состоянии ХОДЬБА с тайм-аутом (отдых в ХОДЬБЕ) в отсутствие обслуживаемого конфликтного вызова без учета удержания статус входа. При неактивном входе неактивная фаза (-ы) не остаются в состоянии «ХОДЬБА» с тайм-аутом, если не активен вход «Удержание».Контроллер устройство повторяет движение пешеходов при достижении Green Dwell / Select состояние при отсутствии исправного конфликтного вызова. |
Рисунок 7-5. Пример специальной последовательности фаз для условного обслуживания фазы левого поворота
Операция алмазной развязки
Некоторые приводимые в действие контроллеры обеспечивают специальный режим работы, основанный на историческом подходе Министерства транспорта Техаса к операции обмена алмазами.Современные контроллеры могут обеспечивать аналогичные функции без необходимости использования специального режима работы, как описано в разделе 3.9.
В Техасе использовались две конкретные схемы фазирования и логика для операции обмена алмазами (7). Они называются трехфазными и четырехфазными последовательностями и описаны в таблице 7-12. Операция может меняться между вариантами последовательности в ответ на внешние команды. Город Даллас предлагает четыре варианта последовательности. Два варианта последовательности, показанные на рис. 7-7, используются Министерством транспорта Техаса.Типичные местоположения детекторов для работы блока контроллера в трехфазной, запаздывающей или четырехфазной (с перекрытием) последовательности с локально созданными внешними данными показаны на Рисунке 7-8. Программное обеспечение также предоставляет возможность использовать любую совместимую комбинацию фаз на пересечении съездов в ответ на данные компьютерной команды, как показано на Рисунке 7-9.
Трехфазная последовательность, показанная на рисунках 7-6 и 7-7, может обеспечить более короткую продолжительность цикла, чем четырехфазная последовательность, показанная на рисунках 7-7.Например, Департамент транспорта штата Техас провел исследование, в котором две последовательности фаз, показанные на рис. 7-7, сравнивались на нескольких пересечениях во время изолированного полного управления. Продолжительность цикла для 4-фазной последовательности была на 40-80% больше, чем для 3-фазной последовательности. Ожидайте аналогичного сокращения продолжительности цикла в других изолированных и взаимосвязанных системах, при условии, что левый поворот остается в разумных пределах, а между выездными съездами (передняя дорога) имеется хранилище.В тех случаях, когда на съезде с рампы (передние дороги) происходят большие повороты, 4-фазная последовательность обеспечивает наилучшую работу.
Одна из трех фазовых последовательностей, показанных на рис. 7-6, также может применяться, когда определенные повороты оказываются тяжелыми. Если контроллер включает более одной последовательности фаз, последовательность может быть изменена в соответствии с эксплуатационными требованиями.
| Эксплуатация | Описание |
|---|---|
| Реставрация левого поворота | При работе стандартного 8-фазного блока регулятора службы левый поворот можно восстановить без предварительного проезда через барьерную линию.В этой операции блок контроллера отслеживает оставшееся время на любом сквозная фаза движения, которой противостоит сквозная фаза, в которой произошел разрыв. Если оставшееся время на непрерывной фазе достаточно как минимум минимальное обслуживание его связанной (параллельной) фазы левого поворота, контроллер блок завершает фазу перерыва и повторно обслуживает левый поворот. Рисунок 7-5 иллюстрирует последовательность фаз. |
| Полная алмазная развязка | Работа 1 стандартного 8-фазного контроллера с модифицированным ПО
для сигнализации полной алмазной развязки.На рисунках 7-6 и 7-7 показаны
4 варианта последовательности:
Применимы различные варианты последовательности, показанные на рисунках 7-6 и 7-7. и зависят от трафика на развязке. Программное обеспечение для 2 или более последовательностей могут быть предоставлены в одном контроллере и изменяется по времени суток или в режиме реального времени в виде шаблонов трафика изменение. |
Рисунок 7-6. Алмазная взаимообменная фазировка (3 фазы).
Рисунок 7-7. Diamond Interchange Phasing (3- и 4-фазный).
Рисунок 7-8. Типичная конфигурация детектора для 3-фазных, запаздывающих и 4-фазных (с перекрытием) специальных последовательностей.
Рисунок 7-9. Алмазный обмен с компьютерным управлением.
Одноточечная развязка на автостраде
Одноточечная городская развязка (SPUI), показанная на Рисунке 7-10, была установлена в нескольких местах на автомагистралях.Конструкция предусматривает базовую операцию с шестью движениями, как показано на рисунке 7-11. Он аналогичен типичному пятифазному управлению на обычных перекрестках, за исключением того, что пешеходы и правые повороты могут потребовать особого обращения. Трудно эффективно разрешить пешеходам переходить перекресток, и пешеходам, переходящим пандусы, могут потребоваться отдельные органы управления на выемках для левого и правого поворота.
Техасский транспортный институт изучил одноточечный дизайн, в результате чего были разработаны ордера и руководства (8).SPUI и узкие городские алмазные развязки с расстоянием от 250 до 400 футов (от 76 до 122 м) между съездами с пандусов (или передними дорогами) были признаны жизнеспособными конкурентами.
Исследование рекомендовало следующие рекомендации для SPUI:
- Эквивалентные объемы левостороннего поворота превышают 600 об / час, так как большие объемы грузовиков ожидаются от съездов с выездом на эстакаду с объемами левостороннего поворота, превышающими 300 об / час
- SPUI становится хорошим кандидатом с:
- Полоса отвода с ограниченным доступом,
- Большие объемы с большой перегрузкой,
- Высокая частота поворотов влево и грузовики большой грузоподъемности (см. Выше) и
- Места высокой аварийности.
- SPUI не является кандидатом на сайтах с:
- Сильные углы перекоса,
- Широкий переход проезжей части,
- Неблагоприятные сорта на перекрестке,
- Средняя или большая интенсивность пешеходных переходов, или
- Сочетание высокой проходимости и низкой скорости разворота на перекрестке.
Рисунок 7-10. Единая городская развязка (SPUI)
Рисунок 7-11.Типичная 3-фазная последовательность SPUI.
Для управления авариями на автостраде часто используются непрерывные дороги, идущие вдоль дороги. Из-за большей продолжительности цикла и увеличения задержек использование SPUI не рекомендуется там, где существуют непрерывные передние дороги, когда SPUI и передние дороги разделены по уровням, одна из которых возвышается над другой.
Возможности системы
Приведенный в действие контроллер при использовании в качестве локального устройства в системе светофоров может обеспечивать дополнительные функции, отличные от описанных ранее.Контроллер получает и реализует различные команды, используя связь с ведущим или центральным компьютером. В системах с обратной связью или центральных компьютерных системах управления система двусторонней связи возвращает информацию от местного устройства к центральному объекту. Состояние управления локальным контроллером и план синхронизации фактически служат примером возвращаемой информации, ориентированной на локальный уровень. Во многих системах, использующих двустороннюю связь, информация системного детектора также возвращается на ведущее устройство наблюдения или центральный компьютер.
Пользователь центрального управляющего компьютера может загрузить и изучить набор данных контроллера (временные параметры). Копию данных контроллера можно хранить в центральной базе данных, изменять и загружать в контроллер полностью или частично.
Реализация длительностей загружаемых интервалов и фазовых последовательностей может быть предметом локальных минимумов, максимумов или других проверок, или загруженные данные могут перезаписывать существующие данные без каких-либо проверок. Методы варьируются от системы к системе, и инженеры по дорожному движению должны осознавать возможные последствия для транспортного потока и безопасности операций.
Ведущее устройство в полевых условиях также может хранить копию таймингов контроллера.
7.6 NEMA, Advanced Transportation Controller и стандарты модели 170
Национальная ассоциация производителей электрооборудования (NEMA) поддерживает стандарт TS 2 (6) для контроллеров сигналов светофора и сопутствующего оборудования. Этот стандарт определяет функциональные возможности, интерфейсы (физические и логические), устойчивость к окружающей среде, электрические характеристики и некоторые физические характеристики для следующих компонентов:
- Контроллеры светофоров,
- Блок управления неисправностями,
- Детекторы транспортных средств,
- Реле нагрузки,
- Блоки интерфейса шины,
- Средства для мигания сигнала и соответствующей передачи управления, и
- Шкафы.
Стандарт TS 2 не определяет физический размер, форму или внешний вид большинства компонентов, за исключением случаев, когда стандартизация необходима для физической взаимозаменяемости целых компонентов от разных производителей. Хотя для контроллера указаны максимальные размеры, производитель может изготавливать блок любого меньшего размера из любого материала, любой формы, с внутренними компонентами любого типа, если он соответствует другим требованиям стандарта. Не существует требований, обеспечивающих взаимозаменяемость субкомпонентов или программного обеспечения между контроллерами разных производителей.Предполагается, что весь контроллер и его программное обеспечение будут заменены при внесении изменений. Стандарт определяет ряд шкафов альтернативных размеров, каждый из которых имеет полки и дверцу только с одной стороны.
Стандарт TS 2 включает в себя базовые спецификации для интервальных контроллеров (в TS 2 они называются «заранее рассчитанными»), но предоставляет гораздо больше деталей для фазовых контроллеров (называются «активированы»). Функции фазирования и синхронизации сигналов, описанные выше, применимы только к фазовым (управляемым) контроллерам, которые являются преобладающим типом, используемым сегодня.
Аппаратные требования для контроллеров определены NEMA TS 2 в следующих областях:
- Разъемы A, B и C для шкафов, использующих более старый стандарт TS 1
- Последовательная шина для связи с MMU, детекторами и переключателями нагрузки
- Последовательные порты для связи с компьютерами и ведущими устройствами (RS 232 и модем FSK)
- Пользовательский интерфейс (клавиатура и дисплей, требуются, но подробности не указываются)
- Максимальные размеры
Стандарт NEMA TS 2 определяет два альтернативных типа интерфейсов ввода / вывода для контроллера.Один состоит из двоичных (включенных или выключенных) логических проводов (аналоговых), подключенных к контроллеру через три круглых разъема, обозначенных как MS-A, MS-B и MS-C. Этот интерфейс изначально был стандартизирован в предыдущем стандарте NEMA — TS 1. Он до сих пор широко используется и остается опцией в TS 2. Для контроллеров, совместимых с NEMA, обычно используются дополнительные провода управления вводом / выводом через нестандартный разъем. МС-Д.
Другой тип интерфейса ввода / вывода, указанный в TS 2, — это последовательная шина.Эта опция уменьшает количество проводов в шкафу, обеспечивая аналого-цифровой преобразователь и агрегатор рядом с детекторами или переключателями нагрузки, которые являются источником или назначением входов или выходов. Затем простой кабель последовательной связи соединяет эти блоки интерфейса шины с контроллером. Каждый блок интерфейса шины поддерживает несколько детекторов или переключателей нагрузки.
Контроллер, созданный в соответствии с физическими требованиями стандарта NEMA TS 2, обычно называется контроллером NEMA.Он предназначен для работы в шкафу «NEMA», отвечающем спецификациям NEMA TS 2, и может использовать либо разъемы A, B, C (часто называемые интерфейсом TS 1), либо интерфейс последовательной шины (часто называемый последовательным интерфейсом TS 2. ) для входов и выходов шкафа.
Для управляемых контроллеров светофоров стандарт TS 2 определяет функциональность, в первую очередь, в следующих областях:
- Фазы, расположенные в определенной последовательности в кольцах с перегородками
- Перекрытия (зеленые выходы, которые могут охватывать несколько фаз)
- Логика одиночного и двойного входа (какую фазу выбрать во втором звонке, если звонка нет)
- Переработка пешеходов (разрешение пешеходной прогулки, кроме начала зеленого)
- Фазовые интервалы и их синхронизация (включая минимальное и максимальное время зеленого, желтого, красного и пешеходного времени)
- Время координации (цикл, смещение, разделение, разрешительный период, временная база)
- Точки выбора фазы (когда выбрана «следующая фаза»)
- Фазовое хранение вызовов (блокировка вызовов)
- Пользовательские отзывы о транспортных средствах и пешеходах
- Автоматический вызов при принудительном завершении фазы
- Условное повторное обслуживание фазы в барьерной группе
- Одновременный выход
- Процесс запуска
- Красный возврат времени
- Прерывание
- Мигание, затемнение, диагностика
- Удаленная связь (включая требования NTCIP)
Те же функции применимы к контроллерам NEMA, использующим любой из интерфейсов ввода / вывода шкафа (разъемы A, B, C или последовательную шину).
Семейство стандартов Advanced Transportation Controller поддерживается консорциумом, состоящим из NEMA, ITE и AASHTO. В настоящее время действуют два стандарта:
.- Расширенный транспортный контроллер 2070 (ATC 2070)
- Шкаф ИТС для УВД (9)
Стандарт ATC 2070 (10) основан на спецификации контроллера Caltrans Model 2070 (11) (12) (13) (14). В отличие от стандарта NEMA TS 2, стандарт ATC 2070 определяет каждую деталь аппаратного обеспечения контроллера и внутренних подкомпонентов, но не определяет никаких функций прикладного программного обеспечения. Требуется операционная система OS-9, минимум 4 МБ динамического произвольного доступа. память (RAM), 512 КБ статической ОЗУ и 4 МБ флэш-памяти.Он также определяет форму и функции следующих модулей, а также стандартного шасси и каркаса для карт, в которые могут быть вставлены модули карт любого производителя:
- Блок питания
- Модуль центрального процессора
- Интерфейсный модуль полевого ввода / вывода
- Модуль модема FSK
- Модуль последовательных портов RS232
- Модуль оптоволоконного приемопередатчика
- Передняя панель (пользовательский интерфейс)
В дополнение к стандартным модулям некоторые производители предлагают проприетарные коммуникационные модули, такие как коммутаторы Ethernet и держатель для карт VME, которые вставляются в стандартный отсек для карт контроллера.Первоначальная спецификация модели 2070 включала положение для вспомогательного отсека VME высотой 3U с пятью платами внутри корпуса с центральным процессором, расположенным на плате VME. Этот вариант сохранен в спецификации ATC 2070, но не оказался популярным. Клетка и процессор VME редко указываются или поставляются. Контроллер без каркаса VME часто называют «2070 lite», его центральный процессор расположен на модуле в основном каркасе для карт 2070.
Кто угодно может разработать программное обеспечение для диспетчера УВД для любых целей (например,g., управление сигналом светофора, полевой мастер-блок, измерение пандуса, счетные станции, динамическое управление знаками сообщений, реверсивное управление полосами движения и т. д.), зная, что он будет работать с контроллерами любого производителя. Большая часть программного обеспечения контроллера ATC для сигналов светофора соответствует функциям, указанным в NEMA TS 2, и функционально аналогична контроллеру NEMA.
Стандарт ATC 2070 включает опции для интерфейсов ввода / вывода, которые позволяют использовать его в любом из четырех стандартных шкафов сигналов светофора — TS 1, TS 2 серийный, шкаф ITS и шкаф Caltrans модели 33x.Интерфейсный модуль ввода / вывода шкафа TS 1 включает в себя стандартизированный четвертый разъем, называемый разъемом D.
Стандарт шкафа ITS (10) сочетает в себе лучшие характеристики шкафа Caltrans модели 33x и последовательного шкафа NEMA TS 2, обеспечивая при этом дополнительные входы и выходы, более распределенный и гибкий мониторинг неисправностей и уменьшенную проводку шкафа. Это стоечный шкаф с дополнительными размерами, одной или двумя стойками и дверцами спереди и сзади. Стандарт включает спецификации для всех компонентов шкафа, кроме контроллера, детекторных карт и переключателей нагрузки.Его можно использовать с контроллером ATC 2070 и платами извещателей TS 2 и переключателями нагрузки.
Вместо одного блока управления неисправностями стандарт шкафа ITS требует наличия блока мониторинга конфликтов и нескольких дополнительных блоков мониторинга — по одному в каждой входной или выходной стойке. Вместо модуля интерфейса шины он вызывает модуль последовательного интерфейса, который интегрирует последовательный интерфейс во входной или выходной разъем и использует протокол, отличный от того, который используется в BIU. Этот протокол аналогичен внутреннему используемому в ATC 2070.Это новый стандарт, и потребуется некоторое время, прежде чем соответствующие компоненты станут доступными и будет развернуто большое количество шкафов ITS. Программное обеспечение контроллера ATC 2070 требует некоторой модификации для работы в шкафу ITS.
Рабочая группа по стандартам ATC разрабатывает дополнительные стандарты контроллеров, которые обеспечат большую гибкость как для аппаратного, так и для программного обеспечения контроллера. Новая версия контроллера ATC позволит использовать разные физические формы, разные центральные процессоры и, возможно, разные операционные системы.Также запланированы дополнительные коммуникационные порты и память. Стандарт интерфейса прикладных программ облегчит переносимость программных приложений между контроллерами, использующими разные процессоры и операционные системы, и позволит совместно использовать системные ресурсы между несколькими приложениями (от разных поставщиков), работающими одновременно на одном контроллере.
Спецификации, разработанные совместно штатами Калифорния и Нью-Йорк, описывают семейство компонентов управления движением Model 170 (11).Эти стандарты охватывают оборудование для шкафов и все компоненты, включая контроллер. Как и в случае со стандартами ATC, спецификации модели 170 не определяют функциональность программного обеспечения. Эти спецификации относятся к 1970-м годам. Контроллер Model 170 основан на процессоре Motorola 6800, который больше не производится. Вычислительная мощность и память сильно ограничены, а программное обеспечение, написанное для контроллера модели 170, нельзя легко расширить, добавив такие функции, как поддержка более 8 фаз и двух колец или полная связь NTCIP.
Контроллер модели 170 широко используется и будет использоваться еще некоторое время. Поскольку запасные части для некоторых компонентов больше не производятся, в конечном итоге их придется заменить. Компания Caltrans разработала контроллер модели 2070 в качестве замены.
Шкафы модели 33x, используемые с контроллером модели 170, поддерживаются дополнительным полевым модулем ввода / вывода в стиле модели 170 в стандарте ATC 2070, поэтому относительно легко заменить контроллер модели 170 на контроллер ATC 2070.Однако программное обеспечение модели 170 не запускается автоматически на ATC 2070.
Некоторые производители предоставляют варианты контроллера модели 170, которые включают:
- Улучшенный интерфейс пользователя на передней панели,
- Более мощный центральный процессор и
- Дополнительная память.
Хотя такие усовершенствования не стандартизированы, они обеспечивают еще одно средство продления срока службы семейства Model 170.
Департамент транспорта штата Нью-Йорк использует аналогичный контроллер Model 179 (16).Модель 179, хотя и использует несколько более мощный микропроцессор, не получила такого же признания, как Модель 170.
Выбор и перенос контроллера
Выбор контроллера и шкафа должен основываться на анализе требований агентства.
Для типичных приложений подходит любой из трех стандартных типов контроллеров — NEMA, ATC, Model 170. Однако контроллер модели 170 имеет ограниченные возможности для поддержки сложных программных приложений, таких как полная поддержка NTCIP или использование более восьми фаз в двух кольцах.Устаревание оборудования также делает контроллер Model 170 плохим выбором для долгосрочных приложений.
Традиционно контроллеры NEMA предназначены для работы только в шкафах NEMA, хотя новейшие контроллеры NEMA также будут работать в шкафах ITS. Контроллер ATC может использоваться в шкафах любого типа с соответствующим полевым модулем ввода / вывода, но контроллеры NEMA обеспечивают более компактный и простой вариант в шкафах NEMA TS 1. Агентства часто отдают предпочтение одному типу шкафа на основании таких факторов, как обучение полевого персонала, существующий инвентарь запасных компонентов, эстетические соображения (в основном размер шкафа) и политика размещения шкафа.
Если агентство хочет использовать небольшой однодверный шкаф (например, в центральном деловом районе), ему необходимо использовать контроллер NEMA с размером и формой, подходящими для этого шкафа. Если используется большой шкаф NEMA, подойдет контроллер ATC или NEMA. Если шкаф для монтажа в стойку (например, модель 33x или шкаф ITS) предпочтителен, тогда необходим контроллер ATC (или модель 170, если возможно).
Некоторые производители предлагают гибридные контроллеры, которые обеспечивают некоторые функции контроллера NEMA (например,g., малый размер и возможность установки на полку) и некоторые функции ATC 2070 (например, стандартный процессор и операционная система, способные работать с любым программным обеспечением, слоты для модулей связи ATC и стандартные интерфейсы). Некоторые производители предлагают небольшой шкаф и встроенный контроллер. Это часто называют шкафом CBD. Некоторые такие продукты основаны на спецификациях ATC, но не соответствуют стандарту ATC 2070 в отношении физических размеров и модульности.
Поскольку все больше и больше шкафов с традиционной параллельной проводкой между контроллером и входами и выходами шкафа (шкафы NEMA TS 1 и модели 33x) заменяются шкафами с последовательной шиной (NEMA TS 2 и ITS Cabinet), различия между контроллерами NEMA и ATC будут менее значительный.Новейшие контроллеры NEMA и ATC могут работать в любом из стандартных шкафов последовательной шины и позволяют пользователю управлять любым программным обеспечением, совместимым с ATC 2070.
Выбор программного обеспечения, работающего в контроллере, часто является решающим фактором. Если программное обеспечение, поставляемое с контроллером NEMA, предоставляет уникальные необходимые функции, этот контроллер может быть лучшим выбором. Если это программное обеспечение также доступно или доступно только для использования на контроллере ATC, то контроллер ATC может быть предпочтительнее.Контроллер ATC и некоторые контроллеры NEMA можно приобрести отдельно от его программного обеспечения, что позволяет приобретать более конкурентоспособные товары, если требуется конкретный пакет программного обеспечения.
Еще одним соображением является необходимость в запасных частях и обучении пользователей для поддержки различных типов контроллеров и шкафов. Обычно предпочтительно ограничить количество используемых контроллеров и шкафов различных типов.
Агентство может пожелать перейти с одного типа контроллера на другой, либо как часть программы обновления, либо чтобы воспользоваться преимуществами конкретного типа контроллера.Большинство агентств не могут позволить себе произвести полную замену всех контроллеров в одночасье, но делают замену постепенно.
При рассмотрении замены контроллера необходимо учитывать существующий шкаф и любые планируемые или необходимые изменения в шкафу. Если шкафы заменяются по другим причинам, это дает возможность также заменить контроллер, и может оказаться целесообразным перейти на другой тип шкафа.
Контроллер NEMA обычно не может работать в шкафу модели 33x, разработанном для контроллера модели 170, а контроллер модели 170 не может работать в шкафу NEMA (последовательный TS-1 или TS-2).Однако ATC может работать в любом типе шкафа достаточного размера, если он имеет соответствующий интерфейсный модуль. ATC, который не соответствует части съемного модуля полевого ввода / вывода стандарта ATC, не имеет гибкости для перенастройки для работы в другом параллельном шкафу, но обычно включает последовательный порт для использования в последовательном шкафу (например, , NEMA TS-2 или ITS Cabinet).
Программное обеспечение, написанное для контроллера модели 170, не будет работать с ATC, и наоборот.Традиционные контроллеры NEMA не могут работать с программным обеспечением, написанным ни для Model 170, ни для ATC. Следовательно, переключение между этими типами контроллеров неизбежно потребует разного программного обеспечения и обучения пользователей новому программному обеспечению.
Обычно агентство имеет два типа шкафов или контроллеров, используемых в любой момент времени, по мере перехода от одного типа к другому. Большинство агентств стараются избегать одновременного использования более двух разных типов.
2.Асанте, С.А., С.А. Ардекани, Дж. К. Уильямс. «Критерии выбора фазировки левого поворота, последовательность индикации и вспомогательный знак». Отчет HPR Research 1256-IF, Техасский университет в Арлингтоне, Арлингтон, Техас, февраль 1993 г.
3. Оливер, М. «Рекомендации по звуковым сигналам пешеходов». Public Roads, стр. 33–38, сентябрь 1989 г.
4. Оливер М.Б., Дж. К. Феган и С. А. Ардекани. «Звуковые сигналы пешеходов — текущая практика и будущие потребности». Журнал Института инженеров транспорта, стр.35-38, июнь 1990.
5. «Комитет по устранению архитектурных барьеров, звуковые сигналы пешеходного движения для слепых, процедуры оценки перекрестков». Номер политики Совета Сан-Диего 200-16. Сан-Диего, Калифорния, май 1985 г.
6. «Сборки контроллеров трафика с требованиями NTCIP». Публикация стандартов NEMA TS2-03, Национальная ассоциация производителей электрооборудования, 2003 г.
7. Haenel, H.E., A.H. Kosik, and B.G. Марсден. «Инновационные способы управления трафиком в Техасе.»Презентационный документ, Конференция Фонда инженеров, Хенникер, Нью-Гэмпшир, Государственный департамент автомобильных дорог и общественного транспорта, Остин, Техас, июль 1983 г.
8.» Проектирование единой городской транспортной развязки и анализ операций «. Отчет 345 Национальной совместной программы исследований автомобильных дорог , Вашингтон, округ Колумбия, декабрь 1991 г.
. 9. «Стандартная спецификация интеллектуальных транспортных систем (ИТС) для придорожного шкафа (ИТС)». AASHTO, ITE, NEMA, Вашингтон, округ Колумбия, 2003 г.
10. «ATC 2070 — Стандарт расширенного транспортного контроллера (ATC) для контроллера типа 2070». AASHTO, ITE, NEMA, Вашингтон, округ Колумбия, 2001.
11. Куинлин, Т. «Разработка усовершенствованного компьютера для управления транспортом». Отчет CALTRANS.
12. «Описание концепции контроллера усовершенствованной системы управления транспортом модели 2070, окончательный проект». CALTRANS, 2 августа 1993 г.
13. «Технические характеристики транспортного электрического оборудования». Департамент транспорта Калифорнии, октябрь 1994 г.
14. Баллок Д. и К. Хендриксон. «Программное обеспечение для продвинутых контроллеров дорожного движения». Отчет об исследованиях транспорта 1408, Вашингтон, округ Колумбия, 1993.
15. «Спецификации управления дорожными сигналами». (с поправками), Департамент транспорта Калифорнии, январь 1989 г.
16. «Технические характеристики оборудования для управления движением». Отдел организации дорожного движения и безопасности, Департамент транспорта штата Нью-Йорк, Олбани, штат Нью-Йорк, июнь 1990 года.
Далее | ПредыдущийУправление входящим потоком — интеллектуальный метод управления трафиком
Что такое управление входящим потоком?
Inbound Flow Control — мощный метод уменьшения перегрузки.Светофоры на окраине города высвобождают автомобили только с той скоростью, с какой их может нести впереди идущая дорога. Ограничивая поток в часы пик таким образом, заторы возникают (если вообще возникают) только на окраинах города: часть трафика, которая в противном случае стояла бы в очереди в пределах города (потенциально блокируя перекресток), « перемещается. ‘к краю города, где есть место (или пространство легче создать), чтобы удержать его.
Объездная полоса или маршрут позволяет автобусам (и службам экстренной помощи) переходить в начало очереди и присоединяться к единому потоку свободного движения в городе.
Придорожные знаки информируют водителей об ожидаемом времени ожидания в очереди и указывают направление к ближайшей парковке.
Что значит объезд маршрута ?
В некоторых случаях вместо строительства объездной полосы автобусы могут использовать альтернативный маршрут. Например, Worts ’Causeway может обеспечить удобный маршрут от парка аттракционов Babraham, избегая очередей вдоль Babraham Road.
Где я могу увидеть это в действии?
Посмотрите это видео Streetfilms о подобной системе управления дорожным движением в Цюрихе, Швейцария (перемотайте вперед на 5 минут 20 секунд, если вы спешите):
Как это связано с «умным управлением трафиком» и «стробированием»?
Управление входящим потоком зависит от установленной системы интеллектуального управления трафиком.Технически это называется «шлагбаумом», а иногда и «перемещением очереди» или, в контексте автомагистралей, «измерением скорости на съезде». Светофоры, контролирующие поток в город, известны как «ворота» или «контрольные точки».
Какую пользу мне принесет контроль входящего потока?
вожу
Ваше время в пути будет не хуже, а скорее всего, быстрее, чем сейчас. Предварительное уведомление о времени ожидания в очереди поможет вам рассчитать время в пути и решить, когда ехать. В Кембридже время в пути будет значительно меньше.Тем не менее, мы также предлагаем меры, чтобы удержать жителей от доступа к своим автомобилям, в том числе ограничение движения по большему количеству городских дорог.
Улучшение общественного транспорта, парковок и более безопасных велосипедных маршрутов может предложить вам более быструю и удобную альтернативу вождению.
Сажусь на автобус
Время в пути в город и внутри города будет намного более согласованным и быстрым. Ознакомьтесь с другими нашими предложениями по реорганизации автобусных перевозок для предоставления услуг экспресс-доставки в крупные центры занятости, образования и розничной торговли.
I цикл
Меньшие объемы автотранспорта позволят дорожным инженерам повысить вашу безопасность:
- строительство отдельных велосипедных полос там, где в противном случае они могли бы построить автобусные полосы;
- установит заранее зеленые сигналы на всех основных перекрестках, что значительно повысит вашу безопасность;
- перепроектирование перекрестков для уменьшения конфликтов с автомобилями и пешеходами.
Более спокойные водители менее склонны к агрессивному поведению по отношению к вам.
гуляю
Меньшие объемы автотранспорта позволят дорожным инженерам:
- строить отдельные велосипедные дорожки там, где велосипедисты в противном случае могли бы разделять пешеходную дорожку;
- установить больше пешеходных переходов, особенно возле магазинов и других объектов инфраструктуры;
- сокращает время ожидания на пешеходных переходах.
Более спокойные водители менее склонны к агрессивному поведению по отношению к вам.
Насколько велики будут очереди?
Если бы не было других транспортных средств, то очереди на въезд в город в пиковое время были бы несколько длиннее, чем сейчас, но время в пути было бы более постоянным и , как правило, быстрее из-за более плавного транспортного потока в городе.
Мы ожидаем, что со временем очереди будут сокращаться, поскольку люди будут выбирать другие варианты путешествия, чему способствует сочетание стимулов и сдерживающих факторов, которые мы описываем ниже.
В те дни и часы, когда перегрузка теперь не проблема (например, во время школьных каникул и в середине дня), управление входящим потоком не срабатывает, и не будет очереди.
Можно цифры?
Необходимо удерживать не более 20% транспортных средств на дороге, чтобы избежать заторов.Для перемещения этих транспортных средств к транспортным «воротам» требуется такая же длина дороги, которую они занимали бы после «ворот». Таким образом, максимальное необходимое дополнительное пространство для очередей составляет 20% от длины дороги за воротами.
В верхней части Милтон-роуд есть место для 6 въездных и 2 выездных полос, что достаточно для размещения 130 дополнительных транспортных средств.Возьмите Милтон-роуд, который находится в 2,5 км от перекрестка с Коули-роуд и научным парком до уголка Митчема: 20% этой длины составляет 500 м, так что именно столько дополнительного пространства потребуется. в то время, когда Милтон-роуд в противном случае замкнуть .Это примерно 50 автомобилей. Их можно легко решить, изменив конфигурацию дороги между развязкой A14 и перекрестком Научного парка.
Таким образом, общее максимальное требуемое пространство в очереди — это текущее максимальное расстояние, на которое трафик возвращается от того места, где будут расположены «ворота», плюс 20% расстояния от ворот до центра города.
Однако это теоретический максимум, который не требуется на практике, потому что:
- Интеллектуальное управление трафиком и контроль входящего потока сведут к минимуму заторы в городе, которые в настоящее время могут вызывать блокировку на перекрестках с A14 или M11.
- Smart Traffic Management также обеспечит заранее запрограммированные реакции на чрезмерный приток трафика на любом радиальном участке, например, временно удерживая все второстепенные дороги красным цветом или перенаправляя движение на альтернативные маршруты. Быстрое рассредоточение или изменение направления движения гарантирует, что движение никогда не будет опасно задерживаться на A14 или M11.
Необходимо смоделировать фактический объем требуемого места в очереди, в идеале с данными, полученными в ходе испытаний в реальном времени.
Откуда взялась эта цифра в 20%?
Трафик движется свободно, пока дорога не заполнит 80% своей максимальной пропускной способности.Помимо этого, скорость потока становится неустойчивой до тех пор, пока соединения не блокируются и не возникает тупик.
На рисунках 6.15 и 6.16 из Кембриджского исследования доступности показаны заторы во время учебного семестра и школьных каникул.По оценкам людей, во время школьных каникул объемы движения сокращаются на 40%, потому что на многих дорогах исчезают заторы (см. Анимированное сравнение заторов во время школьных и школьных каникул выше). Фактически измеренное сокращение составляет менее 20%. (Исследование движения на дорогах Милтона и Хантингдона в октябре-ноябре 2014 года показало, что трафик упал на 1.3% и 8,3% в течение полугодичной недели.) Это не означает, что родители школы виноваты в скоплении людей (точно так же, как человек, забивший последний гол в футболе, выигрывает матч): это просто показывает, что относительно небольшого снижения интенсивности движения достаточно, чтобы разгружать дороги.
Иллюстрация из книги Правина Варайи, профессора электротехники и компьютерных наук Калифорнийского университета в Беркли «Что мы узнали о заторах на автомагистралях».Исследование, опубликованное Университетом Беркли в Калифорнии, показывает, что пропускная способность непрерывной дороги (в данном случае четырехполосной автострады) составляет от 1500 до 1800 автомобилей на полосу в час.Возможно, удивительно, что пиковая скорость потока такая же, как при 60 милях в час, так и при 30 милях в час: что меняется, так это расстояние между автомобилями.
При скорости 60 миль в час 1800 автомобилей в час равняются 54 м на автомобиль. На скорости 30 миль в час 1800 автомобилей в час равняются 27 м на автомобиль. Это близко к типичному тормозному пути на этих скоростях.
Добавьте на 20% больше трафика, пространство, доступное для каждого транспортного средства, также уменьшится на 20% (и расстояние между транспортными средствами немного больше). Таким образом, водители должны снижать скорость, чтобы поддерживать безопасный тормозной путь.Но это снижает скорость потока, и начинают возникать заторы.
На городской дороге с перекрестками и светофорами пиковая скорость потока составляет менее 1800 автомобилей в час, а удобное расстояние между транспортными средствами больше из-за большей вероятности необходимости замедлить или внезапно остановиться. Но действует тот же принцип: если чистый поток транспорта на дорогу сокращает расстояние между транспортными средствами до уровня ниже комфортного, движение должно замедляться, и возникают заторы.
Как вы сдерживаете очередь?
Во многих случаях потребуется расширить дорогу до контрольной точки с дополнительными полосами движения, одна из которых может быть объездной.
Это, как правило, гораздо проще, дешевле и менее спорным, чтобы сделать на окраине города, чем расширение внутренней городской дороги, чтобы приспособить автобус переулок:
- Деревья и зеленые насаждения в черте города высоко ценятся.
- Перемещение или перезахоронение большого количества коммуникаций (труб и кабелей) под городскими дорогами и обочинами является дорогостоящим и разрушительным.
- Задержка и изменение направления движения в пределах города во время дорожных работ гораздо более разрушительна, чем за пределами города.
- Принудительная покупка земли у нескольких землевладельцев в городе значительно сложнее и дороже, чем покупка полосы сельскохозяйственных угодий.
Как это будет работать для Histon and Milton Roads?
Хистон-роуд и Милтон-роуд представляют собой особую проблему, потому что A14 касается северной части города, и эти дороги уже иногда блокируют съезд с A14. Поэтому было бы прагматично создать дополнительные 500 м полосы очереди на дорогах Хистон и Милтон, используя некоторые или все из следующих средств:
- К югу от A14, расширить Милтон-роуд на одну полосу, а Хистон-роуд на две или три полосы.
- Удлинить и расширить верхнюю часть съезда A14.
- Расширьте трассы A10 и B1049 к северу от A14.
Чтобы снизить нагрузку на кольцевую развязку A14-Milton Rd, движение из деревни Милтон можно было бы изменить во время утреннего пика через Батт-лейн, если бы перекресток с A10 был частично восстановлен только для поворота налево. Этот перекресток также может обеспечить маршрут для парковочных автобусов, чтобы обойти любую очередь на A10. Жители Милтона могли бы извлечь из этого выгоду, если бы в деревне останавливались автобусы.
Разве нам не нужны автобусные полосы?
Достоинством управления входящим потоком является то, что он позволяет всему входящему трафику — автобусам, коммерческим и частным транспортным средствам — плавно перемещаться за пределы контрольной точки, поэтому полосы для автобусов не нужны.
Как мы объясняем в нашей статье об автобусных полосах, преимущества, которые они предоставляют, ограничены, отчасти потому, что автобусы должны присоединяться к основному потоку движения в центре города, на основных развязках и в узких местах (где дорога недостаточно широкая для размещения автобусной полосы).
Всесторонняя реализация интеллектуального управления трафиком и управления входящим потоком заставит автобусные полосы работать, но на самом деле это означает, что они станут избыточными: автобусы будут работать вместе с трафиком, который достаточно свободен, чтобы вместить эти автобусы, когда им придется присоединиться. основной поток.
А как насчет пикового исходящего трафика?
Объем движения, выезжающего из города в вечернее время, зависит от способности города разместить автомобили, т.е.е. количество доступных парковочных мест и стоимость въезда в город (которая может взиматься различными способами, но в настоящее время включает только повременную плату за парковку в определенных местах в центре города).
В настоящее время оба этих фактора неверно откалиброваны:
- У нас больше места для парковки, чем может вместить дорога.
- Стоимость доступа равна нулю для большого количества пассажиров, которые могут бесплатно припарковаться на жилых улицах.
Нам необходимо решить обе эти проблемы, если мы хотим добиться долгосрочного снижения загруженности в оба конца дня.Это будет предметом других наших документов, но вкратце мы ожидаем предложить следующее:
Жилой паркинг
Распространить контроль парковки на все жилые дороги в городе и привлечь жителей к определению того, какие средства контроля и где используются, выбирая из целого ряда вариантов, включая:
- Парковка для жителей всего дня (для предотвращения парковок пригородных и развлекательных)
- Часовая парковка для жителей (для предотвращения парковки на пригородных участках)
- Двойной жёлтый (без парковки)
- Одинарный жёлтый (парковка вечером и в выходные)
- Ожидание с ограничением по времени (для предотвращения пригородной парковки)
- Pay-and-display
- Велопарковка
Бизнес-парковка
- Парковочные места для налоговых офисов (по примеру городского совета Ноттингема).
- Предоставлять гранты или налоговые льготы для создания безопасной крытой парковки для велосипедов.
Парковка в центре города
- Превратите больше места на городских автостоянках в велосипедные.
- Убрать уличную парковку, представляющую опасность для велосипедистов.
- Преобразуйте больше уличных парковок в велосипедные.
Обеспечить удобную и привлекательную альтернативу вождению
Они включены в наш план из десяти пунктов, который будет разработан в ближайшие месяцы.
Inbound Flow Control может помочь стимулировать использование парковки и поездки, предоставляя водителям четкий выбор (например, стоять в очереди в течение двадцати минут или сесть на автобус с парковкой, который отправляется через три минуты). Благодаря объездной полосе маршрутные автобусы могут занять первое место в любой очереди.
Разве жители не получат несправедливую льготу?
Городские жители (и гости) действительно выиграют от незаполненных дорог. Если бы не были приняты другие меры, некоторые жители поддались бы искушению водить машину, когда в настоящее время они ходят на велосипеде или ходят пешком.Некоторые из мер, перечисленных в предыдущем разделе, коснутся жителей, но мы также предлагаем меры по ограничению коротких поездок на автомобиле в пределах города:
- Применение принципа Базовой схемы движения к большему количеству дорог, таких как Northampton St & East Rd, ограничение движения автобусов, такси и транспортных средств доставки.
- Закройте больше жилых дорог для сквозного движения (как, например, сейчас северный Питерсфилд: нет сквозного маршрута от Милл-роуд до Ньюмаркет-роуд).
- Ограничить движение на пересечении основных и жилых дорог.
- Уменьшить количество парковочных мест (см. Предыдущий раздел).
- Увеличить плату за разрешение на парковку для вторых и третьих автомобилей, чтобы стимулировать сокращение числа владельцев автомобилей.
Эти меры заставят жителей более тщательно подумать о том, нужно ли им водить машину, но также имеют значительные дополнительные преимущества, поскольку они делают больше маршрутов более безопасными для велосипедистов и пешеходов, а также делают жилые районы более тихими и менее загрязненными.
Можем ли мы попробовать?
Да, и надо. Испытание позволит получить достоверные данные и, будем надеяться, докажет эффективность управления входящим потоком для улучшения транспортного потока в городе и, следовательно, повышения надежности автобусов и времени в пути. Это также дало бы поставщикам систем степень свободы для экспериментов, что для относительно новаторской техники (по крайней мере, в Великобритании) имеет важное значение.
Если реализовано только на некоторых радиальных дорогах, управление входящим потоком может побудить людей искать альтернативные маршруты, чтобы избежать очереди.Даже если это произойдет изначально, люди быстро поймут, что время в пути не хуже, чем раньше, а обычно лучше. Одной из ключевых сильных сторон Inbound Flow Control является то, что его можно улучшать со временем, даже от минуты к минуте, поэтому, если люди слишком остро реагируют, его можно уменьшить.
Кто сможет использовать объездную полосу?
Объездная полоса может считаться полосой для автобусов, но мы считаем, что следующие участники дорожного движения должны иметь право ее использовать и должны платить за эту привилегию:
- Автобусы (PSV)
- Такси
- Автомобили для розничной доставки (грузовые автомобили и легковые автомобили)
- Курьеры
Автобусные компании уже платят за доступ к местам для парковки и проезда, которые находятся в ведении Совета графства, поэтому платить за использование управления входящим потоком вполне разумно.
Автомобили аварийно-спасательной службы с синим светом получат бесплатный проезд.
Итак, теперь вы предлагаете плату за пробку?
Не совсем так. Плата за пробку будет применяться ко всем транспортным средствам за некоторыми исключениями. Мы предлагаем дополнительную плату, которую владельцы транспортных средств могут оплатить, чтобы не стоять в очереди. Плата по умолчанию будет очень непривлекательной, но владельцы некоторых, в основном коммерческих, транспортных средств могут подать заявку на более низкую ставку. Обоснования:
- Советам потребуется поток доходов для оплаты работы Smart Traffic Management и для возмещения дохода, потерянного в результате сокращения количества городских парковок (одна из других наших рекомендаций).
- Время — деньги для бизнеса, и, поскольку City Deal направлен на содействие экономическому росту, это позволяет предприятиям оптимизировать свою эффективность и конкурентоспособность.
- Структура платы может стимулировать компании использовать экологически чистые транспортные средства в городе.
Как люди будут платить?
Владельцам транспортных средств потребуется создать учетную запись, привязанную к платежной карте или прямому дебету. Камеры автоматического распознавания номерных знаков будут записывать каждое транспортное средство, которое использует объездную полосу, и сопоставлять ее с базой данных зарегистрированных в настоящее время транспортных средств.У владельца неопознанного автомобиля будет, скажем, 24 часа, чтобы создать учетную запись и произвести оплату, чтобы избежать уведомления о штрафных санкциях.
Поскольку для использования объездной полосы требуется предварительная регистрация (в отличие от платных дорог), доступ можно контролировать в режиме реального времени, а водителю неизвестного транспортного средства выводится предупреждающее сообщение.
Эта система также может работать для доступа через закрытые точки (дороги, заблокированные тротуарами) в пределах города, но с более строгими критериями отбора.
Сколько люди будут платить?
Ставка по умолчанию будет установлена высокой, чтобы быть намеренно непривлекательной (скажем, 20 фунтов стерлингов), чтобы гарантировать, что объездная полоса сама не будет перегружена, а также не будет удерживать основную очередь в состоянии покоя.Определенные владельцы транспортных средств будут иметь право подать заявку на более низкую ставку в соответствии с критериями, установленными советом. Применяемая ставка может зависеть от:
- Масса автомобиля
- рейтинг выбросов автомобиля
- типичное использование автомобиля
- особые обстоятельства, такие как инвалидность или наличие указанного лица, осуществляющего уход
Ставка может варьироваться от бесплатного до 20 фунтов стерлингов за дизельный грузовой автомобиль. Это должно приносить несколько миллионов фунтов стерлингов в год.
Google и НАСА вместе разрабатывают систему управления воздушным движением дронов — RT USA News
Google в партнерстве с НАСА и 13 другими компаниями, включая Amazon и Verizon, создает систему управления воздушным движением для дронов, которая называется Беспилотная воздушная система (UAS) Traffic Management.
Дроны — это путь в будущее, и вместо того, чтобы позволить воздуху забиваться неуправляемыми, нерегулируемыми беспилотными роботами, правительство стремится работать с частным сектором над созданием правил воздушного движения. Этот шаг был предпринят после серии инцидентов с участием дронов, в том числе аварий в национальных парках и на территории Белого дома. Тем не менее, для некоторых предприятий правила не могут быть приняты достаточно быстро.
Такие компании, как Google, настаивают на том, чтобы участвовать в разработке системы управления трафиком БПЛА, чтобы они могли попасть на нижний уровень формирующейся многомиллиардной экономики беспилотников.Как сообщает Bloomberg Business, помимо 14 компаний, подписавших соглашения с НАСА, еще 100 предприятий и университетов проявили интерес к проекту.
«Они определенно видят в этом экономическую возможность и то, в чем они хотят участвовать», — сказал Брайан Винн, президент Международной ассоциации беспилотных транспортных систем. «Это настоящее волшебство».
НАСА начало проект как способ создания инфраструктуры и правил, регулирующих использование дронов и других летательных аппаратов на малых высотах.
«Необходима система управления движением UAS (UTM) для низковысотного воздушного пространства, во многом аналогичная сегодняшним наземным транспортным средствам, которые работают в системе, состоящей из дорог, полос движения, знаков остановки, правил и огней, независимо от того, является ли транспортное средство автоматизированный или управляемый человеком », — говорится в сообщении NASA на своем веб-сайте.
«Используя уроки, извлеченные из хорошо зарекомендовавшей себя системы ОрВД, которая выросла из столкновения в воздухе над Гранд-Каньоном на заре коммерческой авиации, система UTM обеспечит безопасные и эффективные операции в воздушном пространстве на малых высотах за счет предоставление таких услуг, как проектирование воздушного пространства, коридоры, динамическое геозонирование, предотвращение суровых погодных условий и ветра, управление заторами, избегание рельефа, планирование и изменение маршрута, управление эшелонированием, упорядочение и интервалы, а также управление на случай непредвиденных обстоятельств », — продолжило агентство .
Краткосрочная цель НАСА — разработать и продемонстрировать систему UTM, которая позволит безопасно выполнять операции в низком воздушном пространстве и беспилотные летательные аппараты в течение пяти лет. В течение 10–15 лет агентство надеется безопасно обеспечить ожидаемое резкое увеличение плотности всех операций в низковысотном воздушном пространстве. Космическое агентство работает вместе с Федеральным авиационным управлением (FAA) и другими государственными учреждениями, а также с партнерами в промышленности и научных кругах над исследованием, разработкой, испытанием и внедрением системы.
Исследования будут сосредоточены на картографировании коридоров и запрещенных для полетов зон (например, аэродромов), создании системы обнаружения столкновений и программировании алгоритма, который позволит дронам безопасно летать в опасных условиях, таких как дождь или сильный ветер, что особенно важно. опасность для таких легких предметов.
«Мы думаем, что воздушное пространство на этой картине — не то место, где какое-либо лицо или какая-либо организация может подумать о том, чтобы взять на себя ответственность», — Дэйв Вос — глава секретного Project Wing компании Google. флот доставки дронов будущего, — рассказал Bloomberg News. «Идея состоит в том, что это не« Google собирается создать решение, а все остальные должны подписаться на него ». На самом деле идея состоит в том, что каждый должен быть свободен для создания решения».
Помимо своего стремления создать почтовую систему БПЛА, Google в июне получил патент, позволяющий производить дроны скорой помощи, которые «(а) определяют удаленную медицинскую ситуацию, (б) определяют целевое местоположение, соответствующее медицинской ситуации, (c) выбрать БПЛА из парка БПЛА, где выбор БПЛА основан на определении того, что выбранный БПЛА сконфигурирован для идентифицированной медицинской ситуации, и (г) заставить выбранный БПЛА отправиться в целевое место для оказания медицинской помощи.
Вос добавил, что, по его мнению, в будущем тысячи дронов будут бродить по небу всего на несколько сотен футов над землей.
Amazon под руководством основателя и генерального директора Джеффа Безоса также уверенно движется к созданию собственного парка дронов для доставки. В июле прошлого года компания подала прошение в FAA о разрешении провести испытания на открытом воздухе для создания своей службы Prime Air.
В рамках стремления к созданию системы UTM в конце июля НАСА проводит конференцию, на которой обсуждаются «последние разработки в области технологий беспилотных воздушных систем, решения проблем и проблем конфиденциальности, безопасности и защиты. и будущее влияние полетов на малых высотах на развивающийся сектор бизнеса.» Коспонсором мероприятия является отделение в Кремниевой долине Международной ассоциации беспилотных транспортных средств.