Преселективная роботизированная коробка передач DSG в автомобилях Volkswagen
Специалисты компании Volkswagen создали новую, уникальную коробку переключения скоростей DSG (Direct Shift Gearbox), которая по своим техническим характеристикам намного превосходит существующие образцы.
В настоящее время преселективные роботизированные коробки передач DSG второго поколения устанавливаются на большинство моделей Volkswagen: Golf, Passat B8,Passat СС, Tiguan, Jetta.
Использование этой коробки передач позволяет почувствовать комфорт и удобство при переключении. Данная коробка сочетает в себе все современные технологии трансмиссий различных типов. Переключение скоростей осуществляется вручную, но за весь процесс отвечает электроника и различные автоматизированные механизмы.
Отличительной особенностью работы коробки является то, что во время переключения передач не изменяется поток мощности. Плавность работы такого агрегата по достоинству оценят как любители загородной быстрой езды, так и владельцы автомобилей, передвигающиеся преимущественно в городской черте.
Особенности работы коробки-робота
Коробка передач DSG может эксплуатироваться в двух режимах — спортивном и нормальном.
Спортивный режим. Данный режим предусматривает более длительное раскручивание при переходе на повышенные скорости и быстрый переход на пониженные передачи. Такой режим является предпочтительным при скоростной езде. Имеется функция Tiptronik, которая позволяет производить управление передачами в ручном режиме.
Всем, кто любит спортивный тип езды, можно использовать переключатели-лепестки, смонтированные на руле. Такие лепестки позволяют почувствовать мощь автомобиля и от души насладиться спортивной ездой.
Нормальный режим. Такой режим является привычным для всех автомобилистов и может использоваться при передвижении по городу или для небыстрого, экономного вождения.
Устройство DSG
6-ступенчатая коробка DSG имеет два, независимых друг от друга блока трансмиссий. Благодаря такой конструкции, происходит поочередное сцепление с двигателем, в зависимости от включенной в данный момент передачи.
Одно сцепление отвечает за работу 1, 3, 5 передачи, второе за 2, 4, 6 передачу. Каждый блок оснащен отдельным приводным валом, передающий вращающее действие на колеса. Передача осуществляется с помощью дифференциала.
КПД роботизированных коробок передач
Применение схемы двойного сцепления в коробках DSG, при сравнении с АКП, имеющей гидротрансформатор, позволяет в значительной мере увеличить КПД. Интеллектуальная система коробки в сочетании с небольшой массой, позволяет значительно понизить расход топлива. Оценить все положительные качества данной коробки можно на автомобилях Passat CC, Golf GTI, Passat Variant.
Интеллектуальный блок управления
Коробка снабжена встроенным блоком, который проводит анализ оборотов двигателя, скорости движения, нажим на педаль газа.
На основе полученных данных автоматически выбирается необходимая передача или момент перехода на другую передачу.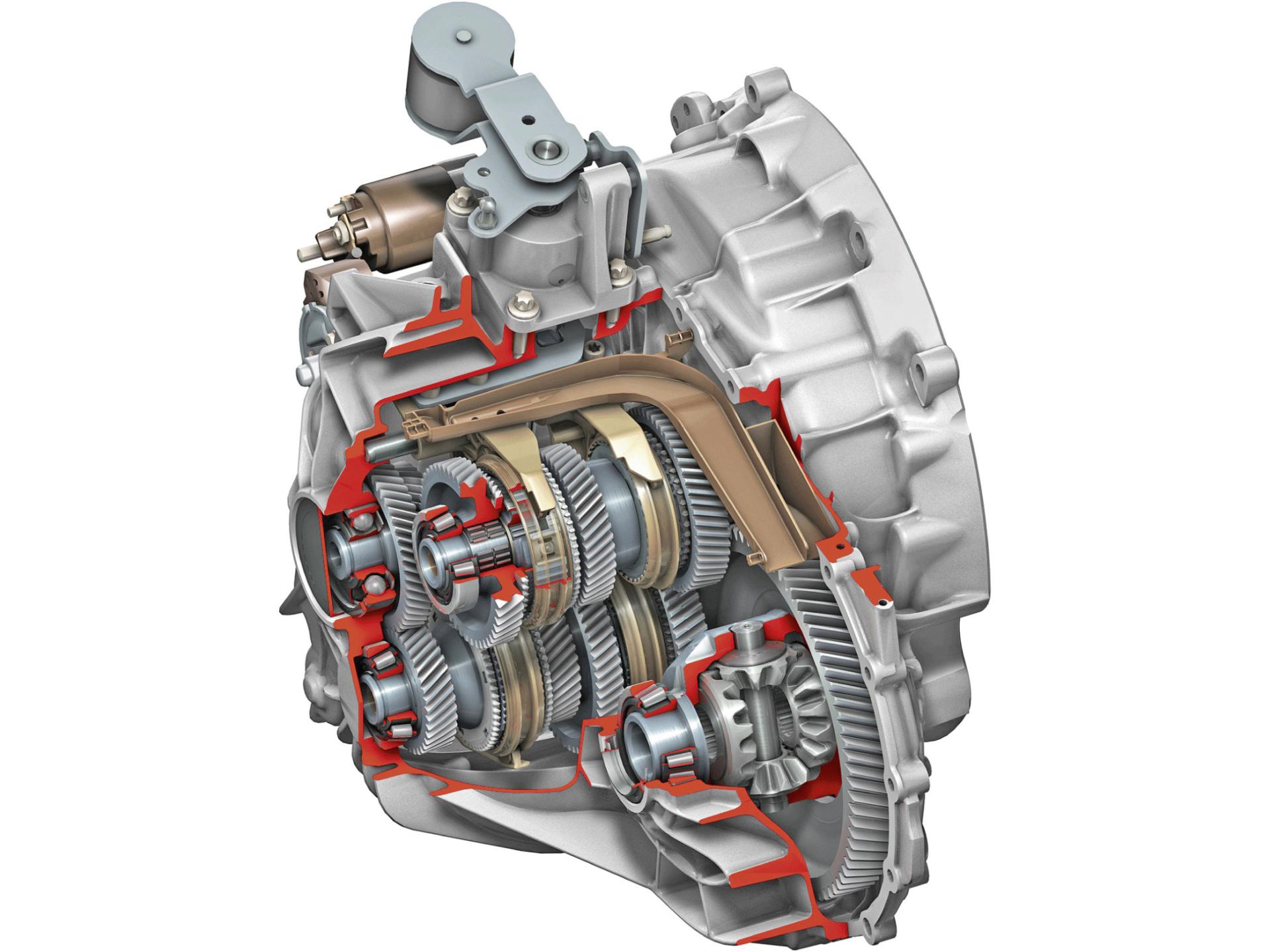 Это обеспечивает плавность движения и снижает нагрузку на двигатель.
Это обеспечивает плавность движения и снижает нагрузку на двигатель.
РКПП — роботизированная коробка передач, «робот»
РКПП — роботизированная коробка передач (коробка «робот), которая позволяет выбирать и включать необходимую передачу без участия водителя, то есть автоматически. При этом ошибочно полагать, что роботизированная трансмиссия является одной из разновидностей АКПП (гидромеханический автомат).
Прежде всего, чтобы понять, что такое роботизированная коробка передач, для начала необходимо вспомнить устройство и принцип работы обычной механической коробки (МКПП). Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т.д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями.
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы. Электрический актуатор -электромотор с редуктором, гидравлический является гидроцилиндром, шток которого связан с синхронизатором. Главной задачей как первого, так и второго типа устройств становится механическое перемещение синхронизаторов КПП, а также включение и выключение сцепления.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т.
Как работает роботизированная коробка передач
Что касается принципов работы РКПП, для начала движения и дальнейшего плавного переключения передач необходимо задействовать сцепление (как и в МКПП). Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
В коробке с двумя сцеплениями сначала включается первое сцепление внутреннего первичного вала. Далее актуатор выбора и включения передачи подводит синхронизатор к шестерне первой передачи. В результате шестерня блокируется на валу и начинает вращаться вторичный вал.
После того, как автомобиль начал движение, водитель продолжает нажимать на педаль газа для разгона. В однодисковых роботах с одним сцеплением для включения второй передачи требуется некоторое время, в результате чего возникает характерный «провал».
Чтобы избавиться от такой задержки и сократить время переключений в конструкцию коробки добавили второе сцепление и еще один вал. В результате появилась так называемая преселективная роботизированная КПП.
Если просто, пока включена первая передача, вторая уже также готова к включению, так как одновременно задействовано второе сцепление. Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Подобным образом происходит переключение на последующие высшие передачи, а также понижение передач при езде. При этом время переключения минимально и занимает доли секунды, исключены перегазовки, практически отсутствует разрыв тяги и т.д. Результат — динамичная езда и максимальная топливная экономичность.
Работа в автоматическом режиме становится возможной благодаря тому, что ЭБУ коробкой постоянно анализирует сигналы с внешних датчиков. Блок учитывает нагрузку на ДВС, скорость движения ТС, положение педали газа, пробуксовку колес и т. д.
д.
Также РКПП имеют возможность ручного переключения передач, имитируя работу гидромеханической АКПП в ручном режиме (например, Типтроник). Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Простыми словами, водитель при помощи селектора выбирает режим, при котором ЭБУ коробкой не будет инициировать включение, например, 3 передачи и выше, что помогает преодолевать сложные участки пути (снег, гололед, грязь и т.д.).
Преимущества и недостатки коробки — робот
Сегодня коробка-робот является достаточно распространенным решением. Например, концерн VAG активно устанавливает подобные коробки, которые знакомы потребителям, как DSG, на разные модели Audi, Volkswagen, Porsche, Skoda и т.д. Также роботизированную трансмиссию массово ставят на модели Ford, Mitsubishi, Honda и машины целого ряда других мировых производителей.
На первый взгляд может показаться, что РКПП имеет только плюсы: надежность и ремонтопригодность «механики», быстрота переключений, топливная экономичность, возможность выдерживать большой крутящий момент и т.д.
При этом по заверениям самих производителей РКПП должны в скором времени полностью вытеснить «классические» АКПП с гидротрансформатором и вариаторные коробки. Однако на практике этого не произошло.
Дело в том, что в плане комфорта работа «однодисковых» роботизированных коробок (с одним сцеплением) далека от АКПП и, тем более, от бесступенчатого вариатора. Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Также ресурс сцепления на «роботе» и актуаторов достаточно низкий (в среднем, около 80-100 тыс. км.). При этом стоимость актуаторов высокая, а ремонтопригодность данных элементов сомнительная. По этой причине многие сервисы практикуют узловую замену, то есть актуатор просто меняется на новый.
Что касается более сложных и дорогих преселективных коробок с двумя сцеплениями, переключения в этом случае более плавные и больше напоминают работу обычной АКПП. Однако ресурс такого «робота» (например, DSG 6 или DSG 7) все равно снижен, нередко возникают проблемы по части механики и электроники, а ремонт в ряде случаев потребует значительных расходов.
В качестве итога отметим, что многие автопроизводители, особенно из Японии, начали постепенно отказываться от установки коробки-робот на свои модели, заменяя ее классической АКПП с гидротрансформатором (ГДТ).
Например, Hondа Civic 8 хэтчбек, который изначально выпускался с РКПП, но в дальнейшем после рестайлинга получил полноценный «автомат». То же самое можно сказать о популярной Toyota Corolla 2007 года, которая позднее получила вместо «робота» автоматическую гидромеханическую коробку.
Почему «роботы» с двумя сцеплениями скоро вытеснят все остальные коробки
А где еще они есть?
Нужно сказать, что идея использования мультидискового сцепления в «роботах» все сильнее захватывает умы производителей.![]() Свои наработки есть у Mercedes: на SLS устанавливается 7-ступенчатая SpeedShift, коробка размещается в «хвосте» автомобиля и связана с двигателем карбоновым карданным валом. BMW в январе 2008-го представила M3 с коробкой производства Getrag, с двойным сцеплением от BorgWarner.
Свои наработки есть у Mercedes: на SLS устанавливается 7-ступенчатая SpeedShift, коробка размещается в «хвосте» автомобиля и связана с двигателем карбоновым карданным валом. BMW в январе 2008-го представила M3 с коробкой производства Getrag, с двойным сцеплением от BorgWarner.
Позднее такая коробка появилась на BMW Z4 и доступна к заказу на купе 335i. FIAT/Chrysler в 2009-2010 году запустил в производство сухую, двухдисковую коробку с индексом С635, с предельной нагрузкой 350 ньютонов на метр. Этот «робот» вживили в AlfaRomeo MiTo. PSA Peugeot Citroën уставливает DCT-коробки на Peugeot 4007 и Mitshubishi Outlander, производства Getrag. Появление многодисковых коробок анонсировали и китайские автопроизводители BYD и QOROS.
Достоинства и недостатки
К бесспорным достоинствам мультидисковых АКПП относятся: быстродействие, минимальная задержка при переключении передач, экономия топлива, непрерывность тяги, возможность осуществления ручного управления.
К недостаткам можно отнести сложность конструкции и, как следствие, высокую стоимость. Для двигателей с тягой более 350 Н*м (+/- 50 Н*м) коробку приходится делать с мокрым картером, то есть со смазкой, что еще сложнее и дороже.
Преселективные коробки достаточно хорошо себя показали при размеренной езде и при ускорении, а вот при движении в городском трафике, из пробки в пробку, плавность переключения может вызывать отдельные вопросы.
Альтернативы
«Робот» с одним сцеплением
Роботизированная коробка передач по сути — обычная механическая коробка, в которой процессом переключения передач руководит электроника. Относительно недорогая коробка дешевле классического «автомата». Плюс тут, пожалуй, один — меньше рычагов управления. По сравнению с «механикой» ниже скорость переключения и выше расход топлива, а по сравнению с «автоматом» плохая плавность хода, то есть переключения обычно сопровождаются ощутимыми толчками.
Классический «автомат» (то, что все привыкли называть АКПП)
Он состоит собственно из гидротрансформатора и набора планетарных передач. Шестерни располагаются по окружности ведущего вала, по типу планет вокруг Солнца, и находятся в постоянном зацеплении. Блокируя ту или иную пару шестерней, можно менять передаточное отношение, скорость вращения выходного вала. Гидротрансформатор выполняет роль сцепления между двигателем и трансмиссией. С той лишь разницей, что отсутствует жесткая кинематическая связь. Передачи переключаются плавно, но и потери мощности на проскальзывании велики, отчего страдает динамика разгона и расход топлива.
Вариатор
Вариатор считается бесступенчатой трансмиссией. В любой коробке передач чем больше пар из ведомых и ведущих шестерней (передач), тем лучше. Это позволяет максимально эффективно использовать возможности двигателя в сочетании с топливной экономичностью. В идеале таких пар должно быть бесконечное множество. Создать бесконечную коробку передач, конечно, невозможно, но есть альтернативное решение.
как правильно пользоваться роботизированной КПП, ее плюсы и минусы с фото и видео
Современные автомобили оборудуются новыми типами трансмиссий, среди которых роботизированная КПП. Чтобы разобраться в основных моментах, связанных с ее эксплуатацией, нужно понимать, что такое коробка передач робот.
Содержание
[ Раскрыть]
[ Скрыть]
Что собой представляет роботизированная коробка передач?
Роботизированная коробка на автомобиле означает нечто среднее между МКПП и автоматической трансмиссией. Фактически роботизированная КПП представляет собой «механику», оборудованную автоматическим сцеплением и возможностью переключения скоростей. Работа этого типа агрегата зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только правильно передавать входящие данные для обеспечения правильной работы КПП.
Перед покупкой авто с таким агрегатом рекомендуется разобраться с основными характеристиками и принципом действия устройства.
Устройство роботизированной КПП
Схематическое устройство конструктивных компонентов РКППЧтобы понять, что такое коробка передач робот, надо разобраться в устройстве агрегата. Дополнительные элементы, предназначенные для выжима сцепления, а также переключения и выбора скоростей, называются актуаторами.
Роботизированная трансмиссия оснащается собственной управляющей системой, выполненной в виде блока управления, а также нескольких контроллеров. Эти датчики предназначены для взаимодействия с блоком. Роботизированная КПП принципиально отличается от традиционной автоматической коробки и вариаторных трансмиссий.
Коробки передач робот, как и механические, оснащаются сцеплением. В таких типах агрегатов не применяются трансмиссионные масла ATF.
В зависимости от производителя автомобиля, роботизированная трансмиссия может оснащаться одним либо двумя сцеплениями:
- если сцепление одно, то это однодисковый агрегат;
- если два, то трансмиссия считается преселективной.

Основные компоненты устройства роботизированного агрегата:
- Сама КПП.
- Актуаторы или сервоприводы. Предназначены для выжима сцепления и активации скоростей.
- Управляющий модуль, являющийся микропроцессорным блоком. Используется для обработки и передачи команд.
- Внешние контроллеры. Количество датчиков может отличаться в зависимости от производителя машины.
КПП
Подробнее с устройством роботизированного агрегата рекомендуем разобраться на примере шестиступенчатой коробки, оснащенной двумя сцеплениями. Агрегат выполнен в виде механической КПП, но оборудуется двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив обладает внутренней полостью, в которую устанавливается внутренний компонент. На внешнем шкиве располагаются шестеренки привода второй, четвертой и шестой скоростей, а на внутреннем — шестерни первой, третьей, пятой и задней передачи.
Каждый вал роботизированной коробки передач оборудуется отдельным сцеплением.
Актуаторы или сервоприводы
Актуаторные устройства могут быть электрическими либо гидравлическими. Электрический тип элементов выполнен в виде электрического моторчика с редукторным устройством, а гидравлический считается гидроцилиндром. Шток последнего связывается с синхронизаторным устройством. Основное предназначение актуаторных элементов заключается в механическом перемещении синхронизаторных составляющих, а также активации и деактивации сцепления.
Управляющий модуль
Управляющий модуль — микропроцессорный блок, на который установлены внешние контроллеры. Эти датчики задействованы в электронной системе управления мотором машины. Датчик трансмиссии взаимодействует с контроллерами от силового агрегата и прочих систем, к примеру, ABS. Управляющий модуль может быть совмещен с микропроцессорным блоком управления ДВС, но трансмиссия будет функционировать по своему алгоритму.
Канал Carvizor подробно рассказал об устройстве и конструктивных особенностях РКПП.
Особенности роботизированной КПП
Электрический привод сцепления функционирует за счет электромотора, а также механической скорости. Работа гидравлического привода основана на специальных цилиндрических устройствах, управление которыми осуществляется посредством электромагнитного клапана. Иногда роботизированный агрегат может быть дополнен электромотором, использующимся для перемещения цилиндрических элементов и рассчитанного на поддержку функционирования гидромеханического модуля. Это устройство, оснащенное приводом, характеризуется долгим переключением скорости, которая может составить до половины секунды.
Если сравнить с гидравлическим устройством, то для работы агрегата не требуется постоянная поддержка нужного уровня давления. В некоторых моделях Опель гидравлические агрегаты характеризуются быстрым циклом переключения скорости, обеспечивающего переключение за 0,06 сек. Но такие роботы обычно устанавливаются на спорткары.
Но такие роботы обычно устанавливаются на спорткары.
Принцип работы коробки передач робот
Схема функционирования роботизированного агрегатаРоботизированный агрегат работает наподобие механики — для начала езды и переключения скоростей водителю надо выжимать педаль сцепление. Процедура активации этого механизма выполняется посредством актуаторного устройства, получающего импульс от управляющего модуля. После подачи сигнала узел медленно вращает редукторный узел.
Если трансмиссия оборудована двумя сцеплениями, то изначально производится активация первого. После этого актуаторное устройство выбора и активации скорости подводит синхронизаторный узел к шестеренке первой скорости. Это приводит к ее блокировке на валу и началу вращения вторичного шкива. Когда машина тронулась с места, водитель жмет на газ. Если трансмиссия однодисковая, активация следующей скорости произойдет через определенный временной промежуток. В итоге появляется так называемый провал во времени.
Для предотвращения появления временной задержки и снижения время переключения передач агрегат оборудуется вторым сцеплением и другим валом. Это привело к созданию преселективной коробки. Во время включения первой скорости вторая готова к активации, поскольку второе сцепление уже задействовано. Когда на агрегат поступает сигнал от управляющего модуля, происходит быстрое переключение с первой скорости на вторую.
Аналогично выполняется последующее переключение на более высокие и низкие скорости во время движения. Временной интервал при переключении минимальный. Любые перегазовки исключаются, также нет провала тяги двигателя и других нюансов. В результате автомобиль едет динамично, а экономия потребления горючего максимальная. Функционирование в режиме автомата достигается благодаря регулярному анализу микропроцессорного модуля импульсов, подающихся с внешних контроллеров.
При получении сигналов и их отправке микропроцессор учитывает:
- величину нагрузки на силовой агрегат;
- скорость езды;
- положение, в котором находится педаль газа.
Роботизированные коробки обладают возможностью ручного переключения скоростей, эту особенность можно назвать имитацией гидромеханического автомата. Некоторые типы агрегатов позволяют выполнить блокировку при активации повышенной скорости.
Некоторые типы агрегатов позволяют выполнить блокировку при активации повышенной скорости.
Режимы работы
Микропроцессорный модуль может функционировать в нескольких режимах:
- Спорт. Обычно его активация производится при движении на трассе, когда автомобиль стабильно едет на повышенной скорости.
- Городской режим. Активируется при движении по городу либо стоянии в пробке.
- Эконом. Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
Как научится ездить на роботизированной коробке передач? Основные особенности управления
Чтобы не допустить появления неисправностей в работе трансмиссии, надо знать, как пользоваться роботом, а именно:
- как выполнять прогрев агрегата;
- как правильно начинать движения;
- как пользоваться трансмиссией при эксплуатации авто в режиме города.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многие производители авто утверждают, что роботизированные агрегаты не нуждаются в прогреве. Но в этом вопросе надо учитывать температуру рабочей жидкости в смазочной системе, а также как масло ведет себя в условиях мороза. Некоторые типы расходных материалов при низких температурах загустевают и собираются в нижней части агрегата. По стандарту процесс прогрева состоит в запуске двигателя и выжидании 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.
Если автомобиль находится в гараже, то выгонять его нужно спокойно и плавно, чтобы не допустить толчков и рывков. При прогреве надо следить за количеством оборотов, их число в идеале будет минимальным и составит около 1 тысячи в минуту. Выполнять прогрев агрегата следует и летом, благодаря этому все составляющие компоненты робота будут качественно смазаны. Выполнение прогрева позволит не допустить быстрого износа и стирания компонентов агрегата.
Основные особенности эксплуатации, которые позволят увеличить ресурс работы агрегата в целом:
- Нельзя допустить буксования при езде в мороз. Это приведет к быстрому износу исполнительных механизмов и узлов. Регулярное буксование станет причиной разкалибровки агрегата.
- Специалисты не советуют часто ездить по сильно заснеженным поверхностям. Транспортное средство может застрять, что в итоге станет причиной пробуксовок.
- В качестве зимней резины рекомендуется использовать изделия, оснащенные шипами. При установке на колеса обычных шин есть вероятность пробуксови на гололеде.
- При длительных простоях, составляющих несколько дней и более, селектор коробки передач рекомендуется устанавливать в положение Е. Мотор должен быть заглушен.
- Если состояние дороги плаченое, специалисты советуют начинать движение со второй скорости, но при этом сильно не газовать.
Об основных принципах управления роботизированной КПП на примере Лады Гранты рассказал Алексей Рыков.
Правила правильного старта на коробке робот
Владельцам машин, оборудованных роботизированными КПП, надо учитывать, что некоторые транспортные средства не имеют дополнительной опции помощи при старте. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться с места. Процедура троганья выполняется так же, как на машине с механическим агрегатом.
Более подробно о начале езды:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг коробки передач устанавливается в режим А.
- Водитель легко, без усилий жмет на газ.
- Одновременно с этим отключается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и высокая влажность, селектор коробки можно перевести в положение М1. Сила воздействия на педаль газа должна быть допустимой, чтобы не произошла перебуксовка. Если машина оборудована гироскопом, то при выборе автоматического режима микропроцессор агрегата сам выберет необходимую скорость и будет выполнять переключение. Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Если изначально устанавливается скоростной режим, то скорость передвижения не рекомендуется менять. Количество оборотов двигателя должно составить от 2500 до 5000 в минуту, но не за пределами этого диапазона. При начале езды на спуске селектор трансмиссии устанавливается в режим А и отключается рычаг ручного тормоза.
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в режиме города и пробок может привести к быстрому износу компонентов трансмиссии. Для предотвращения этого при остановке машины следует переводить рычаг коробки передач в режим N. Затем производится активация стояночного тормоза и остановка мотора. Если остановки кратковременные, к примеру, в условиях пробок, то режим нейтрали можно не включать, достаточно остановиться, когда рычаг установлен в режим А. Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
О тонкостях использования машин с установленным роботом рассказал Василий Костин.
Преимущества
Плюсы роботизированных агрегатов:
- Надежность конструкции агрегата в целом. В основе устройства лежит механическая составляющая, которая прошла многочисленные испытания и изучена специалистами. Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
- Эксплуатация автомобиля с установленным роботизированным агрегатом позволяет сэкономить горючее. Если коробка и двигатель машины не изношены, то экономия горючего может быть до 30%.
- Для заправки в роботизированный агрегат требуется меньше смазочной жидкости, в среднем это не более трех литров. Для сравнения — в вариаторные коробки заливается около семи литров. Такое преимущество позволяет сэкономить финансовые средства.
- Количество передач в роботах соответствует числу скоростей на механике.
- Благодаря тому, что основу КПП составляет механическая часть, это позволяет выполнить простой ремонт. Навыками подобного ремонта владеют многие специалисты, чего не скажешь о вариаторных агрегатах. Большинство распространенных неисправностей можно решить самостоятельно при правильном подходе.
- Срок службы системы сцепления больше, чем на механических КПП, примерно на 40%. Речь идет не только об экономии финансовых средств, но и о безопасности.
- При эксплуатации авто в городских условиях начать движение без нагрузки на агрегат позволяет функция переключения скоростей в ручном режиме.
Недостатки
Роботизированные КПП имеют не только плюсы, но и минусы, они приведены в соответствии с отзывами владельцем машин с РКПП:
- Основной минус в РКПП заключается в проблемах при программировании трансмиссии. Автовладельцу может быть затруднительно перепрограммировать программное обеспечение, чтобы повысить динамику машины и сэкономить ресурсы агрегата. Поэтому возникают сложности с настройкой трансмиссии под определенный стиль езды. Водителю потребуется время, чтобы привыкнуть к манере функционирования авто для удобной эксплуатации.
- Низкая скорость активации скоростей и замедленная реакция агрегата. Это обусловлено издержками в программировании устройства. Данная проблема характерна и для многих автоматических КПП.
- При езде в условиях города и пробок, а также по неровным дорогам водителю следует переходить на ручной режим управления. В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.
- Во время переключения скоростей ощущаются рывки и толчки. Не на всех агрегатах, но на многих. Это связано с тем, что газ не сбрасывается перед тем, как произойдет переключение скорости. Для ликвидации данной проблемы можно не выжимать полностью педаль газа.
- При движении в гору может разомкнуться сцепление. Проблема связана с перегревом трансмиссионного агрегата. Если автомобиль движется на подъем, рекомендуется переходить на ручное управление.
Решить проблему с перепрограммированием можно путем замены прошивки микропроцессора, но это надо делать, когда закончится срок гарантийного обслуживания.
Каналом HPC представлен реальный негативный отзыв потребителя о работе роботизированного узла на авто.
Отличие роботизированной коробки передач от автоматической
Основные отличия роботизированных трансмиссий от автоматических агрегатов:
- Конструктивные особенности. Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.
- Автоматические трансмиссии выигрывают у роботизированных агрегатов в плане быстроты переключения скоростей. Также на автоматах процедура переключения выполняется более плавно.
- Роботизированные устройства обладают опцией ручного переключения. На автоматических агрегатах возможности ручного управления нет.
- Автомобили, оборудованные роботизированным агрегатом, потребляют меньше горючего. Для их заправки требуется меньше смазочной жидкости.
- Процедура ремонта и обслуживания коробок передач робот обойдется потребителю дешевле, нежели АКПП.
Актуальность коробки робот в России
Российские производители автомобилей почти не устанавливают роботизированные агрегаты на свои продукты. В 2015 году руководство автоконцерна ВАЗ заявило, что модели машин Лада Приора будут оснащаться роботизированными КПП. Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован под отечественные дороги, а также погодные условия, характерные для климата России.
К примеру, автоматы могут отказать в запуске мотора авто, если температура упадет ниже -25 градусов. Роботизированные агрегаты смогут эффективно функционировать и заводить ДВС при -40 градусах. Производитель АвтоВАЗ дает гарантию на три года на КПП, но утверждает, что в среднем срок службы устройства составит около десяти лет. Такой шаг был сделан представительством концерна для увеличения продаж автомобилей Лада Приора.
Сегодня из отечественных автомобилей роботизированные КПП устанавливаются только на Лады Гранты и Приоры.
Официальный канал Лада представил сюжетный ролик о производстве роботизированных агрегатов для автомобилей Лада Гранта.
Советы по выбору роботизированной коробки передач
Перед покупкой транспортного средства с РКПП надо собрать максимум информации о функционировании конкретного типа трансмиссии. Рекомендуется изучить отзывы потребителей, поскольку отдельные варианты роботов обладают «глюками», характерными для всей линейки. В частности, надо узнать о временном интервале при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
Выбирая авто, надо учесть и параметр индивидуальности устройства. Одинаковые трансмиссии могут различаться между собой. Проблемы, связанные с работой агрегата, часто можно удалить посредством перепрошивки микропроцессорного блока.
Основные неисправности в работе роботов
Симптомы, которые могут сообщить о неполадках в работе устройства:
- На контрольном щитке появился сигнализационный индикатор. Это может быть лампочка Чек Энджин или специальный символ, сообщающий о проблемах в работе коробки передач.
- При езде водитель слышит посторонние звуки. О неполадках в работе трансмиссии могут сообщить нехарактерный вой или жужжание.
- Отсутствует реакция при нажатии на газ. Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.
- Появление масляной лужи под автомобилем. Это свидетельствует об утечке расходной жидкости из агрегата.
- Происходит буксовка системы сцепления.
- Когда водитель жмет на газ и делает это плавно либо при переключении скоростей, появляется толчок или рывок.
- Трансмиссионный узел сам по себе прекращает функционировать, автомобиль останавливается и не двигается.
Большая часть неполадок обусловлена некорректной работой микропроцессорного устройства. Если говорить о механических проблемах, то большая часть из них связана с износом составляющих элементов. Такие детали обычно ремонту не подлежат и меняются.
Механические неполадки:
- износ вилки, предназначенной для выбора скорости;
- подшипниковые устройства качения изнашиваются, из-за этого может наблюдаться гул.
Фотогалерея
Фото роботов от разных автопроизводителей приведены в этом разделе.
Видео «Как не допустить быстрого выхода из строя роботизированной КПП»
Пользователь JoRick Revazov рассказал о вещах, которые нельзя делать с роботизированным узлом на автомобиле.
Загрузка …Как правильно управлять роботизированной коробкой передач
На современных автомобилях используется несколько видов коробок передач – механическая, автоматическая, вариаторная. Механическая коробка отличается своей надежностью, но требует от водителя навыков управления. Автоматическая же значительно проще в управлении, но более «капризна» в техническом плане. Недавно же конструкторы выпустили еще один тип КПП – роботизированная. В ней они постарались соединить воедино надежность «механики» с удобством «автомата». И это у них получилось – все больше автопроизводителей комплектуют свои авто роботизированной коробкой передач.
Немного об устройстве
Суть такой коробки достаточно проста – имеется механическая КПП и электронный блок ее управления. У РКПП все функции, которые должен был выполнять водитель с механической коробкой (выжим сцепления, перевод рычага коробки в нужное положение) выполняется актуаторами – сервоприводами электронного блока.
Благодаря этому надежность КПП возросла за счет использования классической «механики» и возросло удобство ее пользования. Водителю всего лишь необходимо переводить селектор в нужное положение (как в автоматической КПП) и наслаждаться ездой, а электронный блок позаботится о том, чтобы выполнялось переключение передач.
Устройство роботизированной коробки передачПри всем этом многие роботизированные коробки оснащаются еще и ручным управлением, что позволяет управлять водителю коробкой самостоятельно, с единственным отличием – нет необходимости выжимать сцепление.
Особенности управления
Некоторые режимы работы РКПП получила от автоматической коробки, а именно:
- «N» — нейтраль. Режим, при котором крутящий момент на колеса от КПП не передается. То есть двигатель работает, на коробку передается вращение, но из-за положения шестерен на колеса оно не передается. Используется при длительной стоянке авто, перед началом движения, после остановки;
- «R» — движение задним ходом. Здесь все просто, водитель переводит селектор в это положение и авто движется назад.
Другие же режимы роботизированной коробки имеют свое обозначение:
- «А/М» или «Е/М» — движение вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть автомобиль движется вперед, а КПП производит переключение передач. В режиме «М» выполняется ручное управление. Переводом селектора в определенный паз выбирается необходимый режим;
- «+», «-» — переключатель передач. Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение передачи при ручном режиме управления «М».
Требуется ли прогрев коробки?
Вроде все просто, и ничего сложного в управлении такой коробки нет – достаточно перевести селектор в нужное положение, и начать движение. И все же следует знать, как управлять коробкой робот, чтобы она работала без проблем.
Начнем с интересного вопроса – нужно ли прогревать КПП перед началом движения зимой? Для автоматической коробки в зимний период прогрев обязателен и выполняется он кратковременным переводом селектора во все положения.
Роботизированная коробка, по сути, механическая и не требует прогрева. И все же зимой перед началом движения прогреть РКПП следует, хотя это не совсем прогрев. Во время стоянки масло в коробке стекает вниз и из-за мороза загустевает. Поэтому рекомендуется зимой после запуска мотора дать время, чтобы масло скорее не прогрелось, а просто растеклось по элементам коробки, снижая между ними трение. Достаточно просто постоять пару минут с заведенным мотором, при этом селектор переводить в разные режимы не нужно, достаточно держать его в положении «N». После этого движение нужно начинать плавно, без резких рывков и проехать так хотя бы 1 км, что обеспечит полный прогрев масла.
Начало движения на подъем, его преодоление, спуск
Многие автомобили с РКПП не оборудованы системой помощи старта на подъем, поэтому правильно начинать движение нужно научиться самому водителю. При старте на подъем с роботизированной коробкой необходимо поступать, как и с «механикой». Для начала движения селектор переводится в режим «А», плавно нажимается акселератор и одновременно авто снимается с ручника. Такое действие исключит откат авто назад. Одновременно жать на газ и снимать с ручника следует потренироваться, чтобы водитель чувствовал двигатель и понимал, когда сцепление начало включаться и можно снимать с ручника.
При начале движения на подъем в зимний период лучше использовать ручной режим, при этом устанавливать первую передачу. Сильно газовать не стоит, чтобы не было пробуксовки колес.
При движении на подъем при выбранном автоматическом режиме коробка самостоятельно начнет переходить на пониженные передачи, что является вполне логичным, ведь при повышенных оборотах преодолеть подъем легче. Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
При спуске же никаких действий от водителя не требуется. Достаточно перевести селектор в положение «А», и снять ручник. При этом авто будет производить торможение мотором.
Остановка, парковка
И третий немаловажный вопрос – правильность парковки и остановки. После полной остановки авто, селектор необходимо перевести в нейтраль «N», поставить на ручник и после заглушить двигатель. При кратковременных остановках перевод селектора в нейтраль необязателен, вполне можно оставаться и на режиме «А». Но стоит учитывать, что при остановке сцепление остается выжатым. Поэтому в пробке или на светофорах, когда остановка затягивается по времени, все же следует переходить на нейтраль.
Другие режимы
Это основные правила, как управлять роботизированной коробкой. Но есть и другие особенности, к примеру, некоторые РКПП имеют дополненные режимы – спорт и зимний, так называемая «снежинка».
«Снежинка» направлена на то, чтобы как можно плавнее и без пробуксовок начать движение на обледенелой дороге. Все что она делает, это обеспечивает начало движения сразу со второй передачи и более плавные переходы на повышенные передачи.
Режим «спорт» производит переход на повышенные передачи при больших оборотах, чем в обычном режиме. Это позволяет быстрее ускоряться. То есть, если при обычном режиме переход на 2 передачу выполнялся, к примеру, при 2500 об/мин, то в режиме «спорт» этот переход будет осуществляться при 3000 об/мин.
Теперь о возможности перехода из автоматического режима в ручной и обратно во время движения. Роботизированная коробка без проблем позволяет это делать. Также позволяется самостоятельно понижать или повышать передачу для изменения скорости движения. Но стоит учитывать, что полностью управление коробкой электронный блок не передаст, он будет постоянно контролировать работу.
Поэтому если водителю вздумается перейти, к примеру, на две передачи вниз, то электронный блок сделать это даст, но при этом проконтролирует обороты двигателя и если они не будут соответствовать выбранной передачи, электроника самостоятельно выполнит переход на допустимую передачу – сработает так называемая «защита от дурака».
Здесь все просто – электронный блок запрограммирован так, что каждой передаче соответствует определенный диапазон оборотов двигателя. И если выбранная вручную передача соответствует своему диапазону, то коробка выполнит переключение, а если нет – включит необходимую скорость.
Полезные советы
Напоследок некоторые рекомендации по эксплуатации и обслуживанию роботизированной коробки.
Такая коробка «не терпит» резких нажатий на педаль газа, поэтому лучше осуществлять движение в спокойном режиме. Даже при необходимости ускориться — лучше жать на акселератор плавно, при этом стоит перейти в ручной режим. А при торможении следует наоборот – переходить в автоматический режим.
Особенностью РКПП является наличие небольших толчков при переключении передач. От них можно избавиться достаточно просто – при переключении передач сбрасывать обороты двигателя, то есть действовать по аналогии с обычной механической коробкой.
Наличие ручного режима позволяет даже выполнять выезд «враскачку» в случае, если авто застряло в сугробе. Но при этом на пользу КПП это не пойдет, так как буксовать на РКПП не рекомендуется, это может привести к декалибровке исполнительных механизмов. Поэтому застрявшее авто все же лучше извлекать с привлечением сторонней помощи.
Обязательно при каждом ТО делать инициализацию и проводить диагностику состояния РКПП, что позволит устранить все неисправности коробки еще на раннем этапе.
Есть и другие мелкие особенности таких коробок, которые зависят от изготовителя. Ими лучше сразу поинтересоваться, чтобы в дальнейшем не возникло недоразумений с эксплуатацией роботизированной коробки.
Почему на авто с «роботом» надо ездить иначе, чем на машинах с «автоматом» — Лайфхак
- Лайфхак
- Вождение
Фото: АвтоВзгляд
Часто покупатели воспринимают автомобиль с двумя педалями как машину, у которой стоит классический «автомат». Для многих это означает, что можно ездить, нажимая лишь газ и тормоз, и ни о чем не думать. К сожалению, это заканчивается дорогим ремонтом трансмиссии. Портал «АвтоВзгляд» рассказывает, почему так происходит и как избежать беды.
В последнее время на машинах разных классов и ценовых категорий появились роботизированные трансмиссии с одним или двумя сцеплениями. Производители все чаще применяют их на своих моделях и это понятно. «Роботы» дешевле, чем классическая гидромеханическая АКП. Делают свое дело и маркетологи, частенько указывая на фирменных сайтах, что у машины стоит настоящий «автомат».
Отчасти это правда, ведь передачи переключаются автоматически. Водителю нужно лишь давить на газ. И вот тут возникаеи масса претензий и проблем. Люди не знают, что обычный однодисковый «робот» — эта та же механическая трансмиссия, но с исполнительным механизмом сцепления и переключения передач. Поэтому, при размыкании сцепления и переключении, скажем, с первой на вторую передачу, в любом случае будет толчок, что потребителю категорически не нравится, ведь на нормальном «автомате» такого нет. В итоге автовладельцы часто жалуются, что машина тупит, не едет. В таких случаях педаль газа продавливают еще сильнее. Но если это делать регулярно, то через 15 000 км сцепление можно просто сжечь. Так что запомните: чтобы «робот» прожил дольше, на нем нужно ездить плавно и без резких ускорений.
Трансмиссия с двумя сцеплениями гораздо технологичнее и нежнее, чем обычный однодисковый «робот»
Фото из открытых источников
«Робот» с двумя сцеплениями технологичнее и дороже, чем однодисковый. Тут нет заметных толчков при переключении передач. Такая трансмиссия нежнее, чем обычный «робот» или «автомат». Значит, и обращаться с ней надо бережнее.
Большинство подобных «коробок» настроены на экономию топлива. Поэтому стремятся как можно быстрее перейти на повышенные передачи. Это и играет злую шутку в пробке или при «рваном» трафике. Алгоритм «коробки» начинает перещелкивать передачи с первой на третью, а потом обратно вниз, что дает большую нагрузку на мехатроник (управляющий модуль трансмиссии) и диски сцепления. Если регулярно ездить по пробкам, то появятся сильные рывки. Придется везти автомобиль на сервис, где платить за замену дисков сцепления, или ремонт мехатроника. Это может дорого ударить по карману владельца.
Поэтому в пробке переводите селектор «робота» в ручной режим и двигайтесь на первой или вторую передачах. Так на «коробку» будет меньшая нагрузка, ведь автоматика перестанет судорожно «гонять» передачи. А чем меньше переключений, тем выше ресурс трансмиссии.
16503
16503
DSG – немецкий «робот» для автомобиля
Аббревиатура DSG по-немецки (Direkt Schalt Getriebe) и по-английски (Direct Shift Gearbox) означает одно и то же: «коробка передач прямого переключения». Впервые разработкой такой КПП занимался француз по имени Адольф Кегресс, сотрудничая с компанией Citroen в 30-е годы ХХ века. Именно ему приписывают идею о создании агрегата с гидромеханическим управлением и двумя сцеплениями. Но конструкцию посчитали сложной, и она не получила широкого распространения. Ее плюсы были оценены уже гораздо позже, когда за дело взялись немецкие инженеры. Попытки создания подобной коробки предпринимали в Porsche, но «настоящая» DSG увидела свет в недрах конструкторского бюро Volkswagen Group.
Первая «серийная» коробка передач DSG была установлена на Volkswagen Golf R32 в 2002 году – а к настоящему времени число проданных автомобилей Volkswagen, Audi, SEAT и Skoda, оснащённых DSG, уже перевалило за 10 000 000. Сегодня автолюбители хорошо знают, что такое DSG, и сколько возможностей она открывает для водителя.
Основные особенности
Главная особенность DSG заключается в том, что она помогает переключить скорости и одновременно сохранить мощность в процессе движения. По сравнению с другими роботизированными коробками передач, у DSG есть такие качества, как экономия топлива и отличная динамика во время набора скорости.
DSG состоит из коробки передач и двух сцеплений. Эта простая система позволяет быстро переключать передачи, а автомобиль за счет этого разгоняется за считанные мгновения.
Как обычно работает механическая коробка? Пока происходит переключение скоростей, теряется динамика. Коробка DSG сводит эту проблему к минимуму, ведь в ней одно сцепление относится к нечетным рядам, а второе – к четным. Пока машина разгоняется, набирая первую скорость, диск на четном ряду сразу включается, и перерывов в разгоне нет.
Плюсы DSG
- Подобный режим переключения скоростей позволяет уменьшить расход бензина. Установлено, что автомобили с DSG потребляют на 10% меньше топлива, чем средства передвижения с обычной коробкой передач.
- Динамичное ускорение – еще один важный плюс. Передачи переключаются всего за 8 миллисекунд! Никакого эффекта «резиновой» тяги, который часто встречается в автоматических коробках передач, здесь нет.
- Если захочется, всегда можно переключать передачи вручную, установив мануальный режим. Так что DSG – это еще и универсальная система.
- DSG на 20 процентов легче, чем гидромеханическая трансмиссия.
- Показатель надежности у DSG в несколько раз лучше «механики»: средний срок службы составляет 300 тысяч километров. Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.
Что важно знать о DSG?
- Для идеальной работы DSG нужно заправлять автомобиль только качественным топливом, иначе дешевый бензин существенно сократит срок службы коробки передач.
- Дрифтовать на автомобиле с DSG не рекомендуется – система может попросту сломаться.
- Как и у всякой коробки передач, у DSG тоже есть слабое место. Так, это сцепление нечетных передач, потому что на него осуществляется максимальная нагрузка, когда машина начинает двигаться. Эта проблема знакома жителям мегаполисов, которые часто стоят в пробках. В этом случае автомобиль переводится на холостой ход с первой скоростью. Водитель придерживает и периодически отпускает педаль газа, а потом снова притормаживает. Сцепление при этом почти активировано, и в результате этого происходит постоянное трение. Происходит перегрев сцепления, и таким образом оно может быстрее износиться.
Кому вообще стоит покупать автомобиль с DSG? Прежде всего, тем, кто хочет сэкономить на горючем – оно не будет расходоваться впустую. Автомобиль с такой коробкой передач отлично зарекомендовал себя как на горных серпантинах, так и на скоростных трассах в городе. Если для населенного пункта не характерны пробки, то здесь и думать нечего – стоит брать!
Также важно заметить, что постоянного переключения четных и нечетных передач DSG не «любит», так же, как и медленной езды. В остальном же эта система будет работать без проблем, к удовольствию водителя.
: роботы — впереди всех | Национальное географическое общество
1. Используйте велосипед, чтобы объяснить основы снаряжения.
Покажите предоставленную фотографию шестерни или покажите ее классу. Спросите: Кто-нибудь может сказать мне, что это такое и для какой цели? Объясните, что это шестерня, и шестерни используются для увеличения или уменьшения силы, увеличения или уменьшения скорости или для передачи или изменения направления движения.
Спросите: Кто-нибудь может сказать мне, к чему подключены педали на типичном велосипеде? Объясните, что педали обычно подключаются к самой большой передаче рядом с передней частью.Покажите изображение велосипеда. Спросите: Что связывает эту большую шестерню с другой шестерней на велосипеде? (Цепь соединяет шестерни.) Скажите учащимся, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педаль на велосипеде, энергия, которую он или она прилагает, превращается в энергию, которая движет велосипед вперед. По возможности покажите классу настоящий велосипед или еще раз картинку с велосипедом. Предложите студентам указать на шестерни, цепь и педали и понаблюдать, как все они взаимосвязаны внутри велосипеда.
Спросите: Кто-нибудь крутил педали велосипеда в гору? На ровной поверхности? Что проще? Что сложнее? Почему? Попросите учащихся обсудить их опыт езды на велосипеде и объясните, что шестерни в велосипеде преобразуют энергию, которую они проявляют, в энергию, которая заставляет велосипед двигаться.
2. Примите участие в групповой демонстрации шестеренок с использованием предметов повседневного обихода.
Спросите : Почему шестерни имеют зубья? ( Шестерни имеют зубья для предотвращения скольжения.) Спросите : Если бы шестерня не имела зубьев, что бы это было? (В большинстве случаев шестерня без зубьев будет колесом. Существуют относительно редкие версии шестерен без зубьев, но почти все шестерни имеют зубцы.) Скажите студентам, что это означает, что мы можем экспериментировать с поведением шестерни, используя другие круглые или круглые объекты. Положите два теннисных мяча рядом на стол в передней части класса. Вызовите добровольца и попросите ученика положить руку на мяч справа, а кончик пальца — на мяч слева.Попросите ученика повернуть мяч справа по часовой стрелке, осторожно удерживая другой мяч на месте кончиком пальца. Это должно заставить мяч слева вращаться против часовой стрелки. Попросите учащегося описать, в каком направлении вращается каждый шар.
Вызовите еще двух добровольцев. Поместите третий теннисный мяч на прямую линию рядом с первыми двумя теннисными мячами. Попросите одного добровольца положить кончик пальца на средний шарик, чтобы удерживать его на месте, в то время как два других добровольца повернут внешние шарики по часовой стрелке.Предложите студентам описать, в каком направлении поворачивается каждый мяч. Объясните ученикам, что две взаимосвязанные шестерни будут вращаться в противоположных направлениях. Это меняет направление силы в системе. При добавлении третьей шестерни направление силы последней шестерни в цепи такое же, как и у первой шестерни в цепи.
Попросите нового волонтера. Дайте ему или ей баскетбольный и теннисный мяч. Попросите добровольца положить баскетбольный мяч справа от себя, а теннисный мяч — слева и соединить мячи так, чтобы они соприкасались.Теперь попросите ученика положить руку на каждый мяч и повернуть баскетбольный мяч по часовой стрелке на четыре полных оборота, осторожно удерживая кончик пальца поверх теннисного мяча. Помогите посчитать повороты баскетбольного мяча, пока доброволец наблюдает за движением теннисного мяча. Попросите ученика описать то, что он наблюдал. Попросите ученика повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описывая движение баскетбольного мяча.
Объясните ученикам, что, используя шестерни разного размера, они могут изменять скорость (скорость) системы; это называется передаточным числом.Например, если у вас две шестерни (A и B) и A в два раза больше B, то за один оборот A, B будет вращаться дважды, тем самым увеличивая скорость (скорость). Если вы переключите передачи, скорость (скорость) будет уменьшена. Итак, теннисный мяч вращается с другой скоростью, чем баскетбольный.
3. Поэкспериментируйте с зубчатыми колесами и ремнями, используя катушки и перфорированную доску.
Разделите класс на рабочие группы по 2-4 человека в зависимости от количества имеющихся материалов.Раздайте каждой группе перфорированную доску, десять колышков, восемь катушек (четыре маленьких и четыре больших), четыре резинки и раздаточный материал «Подготовка роботов». Дайте им следующие инструкции или попросите учащихся следовать за вами, пока вы демонстрируете. Задавайте вопросы, чтобы проверить понимание и успеваемость учащихся. Поощряйте студентов, которые более наглядны, читать шаги, приведенные в раздаточном материале «Подготовка к работе с роботами», во время работы. Если учащимся нужна помощь, отображайте фотогалерею Gearing Up with Robots во время работы.
4. Учащиеся используют колышки и катушки для решения задач, связанных с шестернями.
Скажите студентам, что теперь они будут работать в команде над решением ряда задач, решения которых связаны с шестеренками. Скажите им, что они должны работать в команде для решения каждой из этих задач, используя свои перфорированные доски, катушки и резинки. Выполняйте столько задач, сколько позволяет время, или дайте каждой группе поработать над разными задачами. После каждого испытания выполняйте задание Шаг 5.
- Задача 1: Роботу требуется энергия, передаваемая на его колеса от источника энергии, расположенного на расстоянии; Кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестерни и ремень, с которым можно работать. Какая конфигурация подойдет для решения этой проблемы?
- Задача 2: Роботу требуется энергия, передаваемая на его колеса от источника энергии, расположенного на расстоянии, но направление движения не нужно менять.Есть шестерни и ремень, с которым можно работать. Какая конфигурация подойдет для решения этой проблемы?
- Задача 3: Роботу необходимо двигаться быстрее, чем позволяет его источник энергии, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень, с которым можно работать. Какая передача ставится рядом с источником питания, чтобы набрать скорость?
- Задача 4: Роботу требуется больше мощности для преодоления крутых склонов, а инженер готов пожертвовать скоростью.Есть большая шестерня, маленькая шестерня и ремень, с которым можно работать. Какую передачу ставить рядом с источником питания, чтобы получить мощность?
5. Предложите студенческим группам поделиться своими решениями задач.
Попросите группы показать свои доски и объяснить свои решения. Обязательно побудите студентов объяснить, почему они сделали то, что они сделали. Примеры решений этих проблем представлены в фотогалерее Gear Challenge Solutions.
Разрешите бесплатные эксперименты, если позволяет время.
Шестерни— система сборки 15 мм
Шестерни имеют зубья, которые входят в зацепление с другими шестернями для передачи крутящего момента. Шестерни можно использовать для изменения скорости, крутящего момента (крутящего момента) или направления исходной выходной мощности двигателя. Чтобы шестерни были совместимы друг с другом, зубья зацепления должны иметь одинаковую форму (размер и шаг).
Зубчатые колеса предлагают большую гибкость в преобразовании движения, чем звездочки и цепь, потому что существует большее разнообразие размеров шестерен.
Есть много разных типов шестерен; одна из самых простых и наиболее часто используемых — это прямозубая цилиндрическая шестерня , которая используется в системе сборки REV 15mm Build System. Цилиндрические шестерни состоят из диска с прямыми зубьями, выступающими радиально (наружу от центра), и эти шестерни будут правильно зацепляться с другими шестернями, только если они находятся на параллельных валах.
Общие и важные особенности прямозубой шестерни выделены на изображении ниже.
Число зубцов (N) — это общее количество зубцов (выступов) по всей окружности шестерни.Для шестерен с очень небольшим или очень большим количеством зубьев легко просто подсчитать количество зубьев. Однако для шестерен с большим количеством зубьев или с меньшими зубьями попытка подсчета зубьев не очень практична или точна.
Модуль (M) представляет собой величину делительного диаметра в мм на зуб. Шестерни с более высоким модулем будут иметь большие зубья. Модуль (M) может быть рассчитан с использованием некоторой комбинации делительного диаметра (PD), количества зубьев (N) или внешнего диаметра (OD).
Уравнения для вычислительного модуля:
M = OD / (N + 2) M = OD / (N + 2) M = OD / (N + 2)
Для помощи в расчетах: REV Plastic Gears имеет модуль 0,75, а REV Metal Gears — модуль 0,8.
Шаговый диаметр (PD) — это воображаемая окружность, которая совпадает с делительным диаметром любой другой шестерни, когда шестерни расположены правильно. Делительный диаметр всегда будет меньше внешнего диаметра шестерни.
При создании упрощенных моделей шестерен сначала создайте окружность с делительным диаметром для каждой шестерни, используемой в системе, затем ограничьте касательные окружностей (едва касаясь друг друга) друг к другу. Диаметр шага (PD) можно рассчитать с использованием некоторой комбинации модуля (M), количества зубьев (N) или внешнего диаметра (OD).
Уравнения для расчета среднего диаметра:
PD = M × NPD = M × NPD = M × N
PD = (OD × N) / (N + 2) PD = (OD × N ) / (N + 2) PD = (OD × N) / (N + 2)
PD = OD − 2MPD = OD -2MPD = OD − 2M
Внешний диаметр (OD) — истинный внешний диаметр шестерни.Внешний диаметр всегда будет больше, чем делительный диаметр . Внешний диаметр следует использовать при проверке натяжения при размещении шестерен очень близко к другим конструкциям. Наружный диаметр (OD) можно рассчитать по приведенной ниже формуле.
Уравнения для внешнего диаметра:
OD = (N + 2) × MOD = (N + 2) × MOD = (N + 2) × M
Система сборки REV 15 мм включает в себя как металлические и пластиковые шестерни.В таблице ниже приведены некоторые основные характеристики для различных типов шестерен.
† Большинство металлических шестерен REV 15 мм изготовлены из алюминия. Есть три исключения. Шестерни с 12 и 28 зубьями изготовлены из спеченной стали. Шестерня с 12 зубьями изготовлена из обработанной латуни.
Металлические и пластиковые шестерни совместимы с оборудованием M3 с шагом 8 мм.
Все пластиковые шестерни REV Robotics имеют монтажную схему отверстия под болт M3 с шагом 8 мм.Это упрощает прямую установку кронштейнов и экструзии REV Robotics на шестерни. Конструкция с перепонками в сочетании с широкой поверхностью и малым профилем зубьев увеличивает прочность шестерни без значительного увеличения веса. Пластиковые шестерни REV Robotics предназначены для установки на шестигранный вал диаметром 5 мм, что устраняет необходимость в специальных ступицах и установочных винтах.
REV Metal Gears НЕ совместимы с REV Plastic Gears. Шестерни из других строительных систем могут иметь очень похожий профиль зуба, но не полностью совпадать.В некоторых ситуациях можно успешно использовать две системы шестерен вместе, но это не рекомендуется.
Metal Gears разработаны для работы с шестигранными валами REV 5 мм в условиях высоких нагрузок. Металлические шестерни REV Robotics также имеют схему отверстий M3, но этот узор фокусируется на том, чтобы шестерни можно было сдвинуть вдвое для дополнительной прочности. В целом, металлические шестерни REV имеют более высокий предел текучести, чем пластиковые шестерни REV, особенно когда металлические шестерни сдвинуты вдвое. Толщина зубьев шестерни, известная как ширина поверхности, является основным компонентом прочности шестерни.
На лицевой стороне REV Metal Gears отображается количество зубьев шестерни, что помогает в расчетах!
Все металлические шестерни REV более узкие, чем пластиковые шестерни, что позволяет использовать компактные трансмиссии и коробки передач в пределах той же ширины 15 мм, что и экструзионные и пробивные трубки (REV-41-1453).
Соединение двух или более шестерен вместе известно как зубчатая передача . Выбор шестерен в зубчатой передаче как большего или меньшего размера относительно входной шестерни может либо увеличить выходную скорость , либо увеличить выходной крутящий момент , но это не повлияет на общую мощность .
Физические концепции, такие как скорость и мощность, находят множество применений в системе сборки REV 15mm Build System. Щелкните здесь, чтобы узнать о них больше.
Передаточное число — это соотношение размеров двух шестерен. Например, на изображении ниже входная шестерня представляет собой шестерню с 15 зубьями, а выходная шестерня — с 72 зубьями. Итак, передаточное число составляет 15 зуб: 72 зуба. Передаточное отношение размером от входной (ведущей) шестерни к выходной (ведомой) шестерне определяет, будет ли выходной сигнал более быстрым (меньший крутящий момент) или большим крутящим моментом (медленнее).Передаточное число пропорционально изменению скорости и крутящего момента между ними.
Чтобы узнать больше о передаточных числах и их влиянии на скорость и крутящий момент, ознакомьтесь с разделом Передаточное число
На изображении выше входная шестерня с 15 зубьями вращается по часовой стрелке. Когда входная шестерня вращается, она давит на выходную шестерню, где зубья входят в зацепление. Это действие передает движение на ведомую шестерню, но заставляет ведомую шестерню вращаться в направлении, противоположном входному.
Один из способов изменить направление вращения зубчатой передачи — это добавить роликов . Холостые колеса находятся между входной и выходной шестернями в зубчатой передаче и могут помочь вам управлять вращением выходной шестерни. Чтобы узнать больше о натяжных роликах, ознакомьтесь с разделом Ролик
Если вы используете шестерни для передачи движения на большие расстояния, например, в трансмиссии, пожалуйста, ознакомьтесь с разделом «Зубчатая передача», чтобы узнать больше о том, как правильно использовать это своего рода механизм.
Как упоминалось в разделе «Технические характеристики», шестерни REV работают с шестигранным валом 5 мм для управления движением зубчатой передачи. Чтобы узнать больше об использовании шестигранных валов и правильной поддержки и ограничения движения, посетите страницы, указанные ниже:
Чтобы шестерни работали эффективно и не повреждались, важно правильно отрегулировать межцентровое расстояние . Шестерни, обозначенные ДЕТАЛЯМИ A на рисунке ниже, могут работать при очень небольшой нагрузке, но они определенно не будут работать и будут пропускать работу при любой значительной нагрузке.Шестерни в этом примере слишком далеко друг от друга, поэтому зубья каждой шестерни почти не соприкасаются друг с другом. Шестерни в ДЕТАЛИ B правильно расположены и обеспечивают плавную и надежную работу.
Иногда в конструкции может быть желательно сложить вместе несколько одинаковых шестерен на валу, чтобы увеличить грузоподъемность шестерен. В случае, когда количество зубьев шестерни не делится на шесть, из-за того, как они ориентированы при установке на шестигранный вал, зубья могут не совпадать между двумя шестернями.Чтобы обеспечить одинаковую синхронизацию всех шестерен, используйте выемку центрирующего вала, чтобы установить все шестерни на вал с одинаковой ориентацией.
Знание метки совмещения гарантирует, что все зубья шестерни будут совмещены на валу. На приведенном ниже рисунке показан пример простой руки робота, которая может поднимать тяжелый груз. Использование двух шестерен для подъема рычага удваивает взаимодействие материала с шестигранным валом и позволяет рычагу выдерживать более тяжелые нагрузки.
Понимание конструкции двигателя и коробки передач: 10 шагов (с изображениями)
Теперь мы должны выбрать двигатель и передаточное число.Мы начнем с рассмотрения технических характеристик доступных двигателей и сделаем предположение о том, какой из двигателей может хорошо подойти для этой работы. Мы попробуем использовать один BaneBots RS-550 в качестве отправной точки из-за его высокой мощности, а это значит, что он сможет выполнять работу быстрее. Кроме того, он обычно используется в подобных приложениях, а это означает, что он, вероятно, хорошо подходит для работы в целом. Чтобы упростить оценку, я сделал график кривой двигателя для RS-550.
Во-первых, мы хотим убедиться, что двигатель не потребляет больше 40 А и не срабатывает автоматический выключатель.Глядя на график, мы можем визуально увидеть, что RS-550 требуется нагрузка 0,23 Нм, чтобы тянуть 40 А. Чтобы двигатель не достиг этого уровня даже при большой нагрузке, мы попробуем спроектировать для потребляемый ток 20 А. Посмотрев снова на график, мы видим, что это соответствует крутящему моменту 0,115 Нм. Теперь мы можем рассчитать уменьшение, необходимое для достижения необходимого крутящего момента 3,05 Нм.
Редуктор:
Теперь мы выбрали редуктор 26: 1, что означает, что мы можем рассчитать точную нагрузку, с которой должен столкнуться наш двигатель лифта.
Нагрузка на двигателе:
Теперь мы можем использовать уравнение (1) из «Характеристики двигателя», чтобы вычислить ток, который мы ожидаем от RS-550 при этой нагрузке:
Потребляемый ток:
Наш расчетный ток потребления, 21,0 А, находится в пределах допустимого диапазона 40 А. Затем мы определим скорость вращения выходного вала коробки передач с помощью уравнения (2). На этом этапе расчетов мы учтем КПД коробки передач 75%.
Скорость двигателя:
Теперь мы можем проверить, позволит ли выбранное передаточное число достичь желаемой выходной скорости 357 об / мин.
Скорость передачи:
Наконец, теперь, когда мы убедились, что передаточное число соответствует нашим требованиям, мы можем рассчитать, сколько времени потребуется двигателю, чтобы поднять лифт.
Время подъема:
Теперь мы полностью проверили, что наш двигатель RS-550 и коробка передач 26: 1 достигают или превосходят наши первоначальные цели. Поскольку реальная производительность часто бывает хуже, чем теоретическая, разумно «перепроектировать» эти системы. Это также гарантирует, что наши упрощения не приведут к тому, что наша система будет работать намного хуже, чем ожидалось.
Когда вы впервые выполняете этот процесс, вам, возможно, придется выполнять вычисления несколько раз, пробуя разные двигатели и передаточные числа. По мере накопления опыта вы научитесь интуитивно понимать, какие двигатели и передаточные числа лучше всего подходят для вашей работы.
Последний шаг в этом процессе — выбор коробки передач. В этом примере имеет смысл выбрать версию RS-550 коробки передач P60 Banebot с редуктором 26: 1. Он не только совместим с нашим двигателем, но также имеет правильный редуктор и общий.Выходной вал со шпонкой 5 дюймов.
Надеюсь, этот пример задачи помог вам понять процесс выбора двигателя и коробки передач. Кроме того, я надеюсь, что он показал вам, как правильно применять теорию, которую вы изучили ранее в этом уроке.
Шестерни — VEX Robotics
Комплект шестерен (276-2169)
(4) Шестерни 12 зуб.
(4) Шестерни 36 зуб.
(4) Шестерни 60 зуб.
(2) Передачи 84 зуб.
Metal Gear 12T (276-7368)
(12) Metal Gears 12T
Высокопрочная металлическая шестерня 12T (комплект из 12) (276-2251)
(12) Металлическая шестерня 12T (0.Диаметр 58 дюймов)
(12) Вставки шестерни 12 зуб.
Высокопрочный комплект шестерни 36 зуб. (276-5034)
(8) Высокопрочная шестерня 36 зуб.
(16) Вставка квадратной шестерни
(16) Вставка свободного вращения
Высокопрочная шестерня 60T (276-5035)
(8) Высокопрочная шестерня 60T
(16) Вставка квадратной шестерни
(16) Вставка свободного вращения
Высокопрочная зубчатая передача 84 зуб. (276-3438)
(4) Высокопрочная зубчатая передача 84 зуб.
(8) Вставка квадратной шестерни
(8) Вставка свободного вращения
Комплект высокопрочной шестерни (276-2250)
(4) Высокопрочная шестерня 12 зуб. (0.Диаметр 58 дюймов)
(4) Высокопрочная шестерня 36 зуб. (Диаметр 1,58 дюйма)
(4) Высокопрочная шестерня 60 зуб. (Диаметр 2,58 дюйма)
(16) Высокопрочная вставка квадратной шестерни
(16) Вставка шестерни свободного вращения
Зубчатая рейка (276-1957)
(16) Зубчатая рейка 19 зуб.
Rack Gear v2 (276-4872)
(16) 19T Rack Gear v2
Расширенный комплект зубчатых колес (276-2184)
(8) Реечная шестерня 19 зуб.
(2) Металлическая шестерня 12 зуб.
(4) Червячные передачи
(4) Червячное колесо
(1) Рама дифференциала
(7) Угол 24 зуба Шестерня
(16) # 6-32 x 1/4 дюйма Винты с полукруглой головкой
Комплект высокопрочных вставок вала (276-3881)
(8) Пластиковые вставки вала
(8) Металлические вставки вала
Комплект шестерен (276-2169): Ацеталь
Высокопрочная металлическая шестерня 12 зуб. (Упаковка по 12 шт.) (276-2251): Сталь
12 зуб. Metal Gear (276-7368): Сталь
Высокопрочная шестерня 36 зуб. (276-5034): Ацеталь
Высокопрочная шестерня 60 зуб. (276-5035): Ацеталь
Высокопрочная шестерня 84 зуб. (276-3438): Ацеталь
Зубчатая рейка (276-1957): Ацеталь
Rack Gear v2 (276-4782): Acetal
Advanced Gear Kit (276-2184): Ацеталь
Комплект высокопрочной вставки вала (276-3881)
Вставка свободного вращения — АБС-пластик
Вставка HS — металлический порошок
Высокопрочная металлическая шестерня 12 зуб. (Упаковка из 12 шт.) (276-2251): 0.002 фунта (0,907 грамма)
Высокопрочная шестерня 36 зуб. (276-5034): 0,012 фунта (5,44 г)
Высокопрочная шестерня 60 зуб. (276-5035): 0,03 фунта (15 г)
Высокопрочная шестерня 84 зуб. (276-3438): 0,08 фунта (35 г)
Rack Gear (276-1957): 0,020 фунта (9,07 г)
Все указанные веса являются фактическими весами одного предмета (без упаковки)
Комплект шестерни (276-2169)
Тип шестерни — прямозубый
Диаметр диаметра — 24
Угол давления — 20 градусов
Ширина торца — 0.250 дюймов (6,35 мм)
Высокопрочная металлическая шестерня 12 зуб. (Комплект из 12) (276-2251)
Тип шестерни — прямозубое колесо
Диаметр шага — 24
Угол давления — 20 градусов
Ширина торца — 0,500 дюйма (12,7 мм)
Диаметр шага — 0,5 «(12,7 мм)
Высокопрочная шестерня 36 зуб. (276-5034)
Диаметр шага — 1,5 дюйма (38,1 мм)
Высокопрочная шестерня 60 зуб. (276-5035)
Диаметр шага — 2,5 дюйма (63,5 мм)
Высокопрочная шестерня 84 зуб. (276-3438)
Диаметр шага — 3.5 дюймов (88,9 мм)
Комплект высокопрочной шестерни (276-2250)
Тип шестерни — прямозубое колесо
Диаметр диаметра — 24
Угол давления — 20 градусов
Ширина торца — 0,500 дюйма (12,7 мм)
Зубчатая рейка (276-1957)
Длина — 2,50 дюйма (63,5 мм)
Advanced Gear Kit (276-2184)
Рама дифференциала Требуется (3) коническая шестерня с 24 зубьями для создания функционального дифференциала
Rack Gears можно непрерывно комбинировать для создания более длинного суппорта
Worm Gear Length — 0.75 дюймов (19,1 мм)
Длина зубчатой рейки — 2,50 дюйма (63,5 мм)
Как использовать шестерни (часть 1)
Каждый созданный вами механизм имеет свои уникальные потребности, зависящие от его цели. В одних случаях вам нужно больше скорости, в других — больше крутящего момента или мощности. В одних случаях необходимо линейное движение, в других — круговое. Для этого вам необходимо создать систему шестеренок, которая будет соответствовать вашим потребностям. В этой части учебного пособия мы рассмотрим и объясним некоторые основные термины, лежащие в основе физики систем передач.
СкоростьПрежде всего, давайте взглянем на термин «скорость» и объясним разницу между линейной скоростью и скоростью вращения:
- линейная скорость — это расстояние, которое объект проходит за определенное время. Она измеряется в км / ч, милях в час, м / с и т. Д. Зная скорость объекта, мы можем рассчитать расстояние, которое он пройдет. Например, если автомобиль движется со скоростью 50 км / ч, то он преодолеет 100 км за два часа.
- скорость вращения — это количество оборотов, которые объект делает за определенный промежуток времени.Обычно он измеряется в оборотах в минуту или об / мин. Например, большой двигатель LEGO EV3 имеет скорость вращения 150 об / мин при 100% мощности. Следовательно, если мы запрограммируем его вращение на 120 секунд или 2 минуты, он повернется 300 раз.
После того, как мы узнали, что такое скорость, перейдем к следующей ключевой характеристике — крутящему моменту. Крутящий момент — это сила вращения. Проще говоря, это сила, которую вы должны приложить, чтобы остановить вращение объекта.Чем больше крутящий момент двигателя, тем больше силы вам понадобится , чтобы остановить его .
Например, если мы хотим, чтобы робот взбирался по наклонной плоскости или поверхности, или если мы хотим, чтобы он тянул большую нагрузку, нам потребуется больше крутящего момента. С другой стороны, если мы хотим, чтобы наш робот участвовал в соревнованиях, нам потребуется больше скорости.
Механическая мощностьПоследняя концепция, которую мы рассмотрим, — это механическая мощность. Для наших целей мы можем рассматривать следующие:
Механическая мощность = скорость вращения X крутящий момент
Когда мы устанавливаем мощность двигателей из блоков перемещения, мы фактически устанавливаем механическую мощность.Таким образом, когда мы увеличиваем значение, мы не только увеличиваем скорость двигателя, но и увеличиваем его крутящий момент.
ШестерниТеперь мы готовы применить на практике то, чему мы научились. Шестерня — это группа зубчатых колес, которые входят в зацепление и, следовательно, приводят друг друга в движение. Зубчатое колесо, которое напрямую приводится в движение двигателем, называется ведущей шестерней , а шестерня, прикрепленная к колесам, или выходная шестерня, называется ведомой шестерней .
Каждое зубчатое колесо по окружности имеет несколько зубцов. Когда мы ставим две шестерни рядом друг с другом, зубцы входят в зацепление с . В результате, когда мы вращаем одну из двух шестерен, другая также вращается. Интересно, что каждый раз, когда зуб первой шестерни проходит через точку зацепления, зуб второй шестерни также проходит.
Чтобы увидеть это на практике, сконструируйте шестерню, следуя инструкциям в видео.
Английский
Каждый созданный вами механизм имеет свои уникальные потребности в зависимости от его цели.В некоторых случаях вам нужно больше скорости, в других — больше крутящего момента или мощности. В одних случаях необходимо линейное движение, в других — вращательное. Чтобы добиться этого, вам нужно создать системы зубчатых передач, чтобы изменять движение двигателей, чтобы оно соответствовало вашим потребностям. Останьтесь со мной в течение следующих нескольких минут, когда я расскажу о некоторых основах систем передач.
Прежде всего, давайте познакомимся с некоторыми терминами, которые мы будем использовать с этого момента. Скорость — ключевая характеристика зубчатых передач.Обычно термин скорость означает расстояние, которое объект проходит за определенное время. На самом деле это линейная скорость. Для нас будет важнее термин «скорость вращения». Это количество вращений, которые объект делает за определенное время. Обычно его измеряют в оборотах в минуту или, кратко, просто об / мин. Просто пример: большой двигатель EV3 делает около 150 об / мин при использовании аккумуляторной батареи и установлен на 100% мощности. Мы можем легко проверить это с помощью этой простой программы. Во-первых, у нас есть двигатель A, работающий в течение 60 секунд на 100% мощности.После этого мы измеряем, сколько оборотов он сделал с помощью датчика вращения, и отображаем результат. Наконец, мы оставляем десятисекундную паузу, чтобы увидеть результат. После запуска программы вы должны получить результат, близкий к 150. Вы можете запустить эту программу несколько раз, чтобы найти среднюю скорость двигателя. Так же, как вы измеряете силу, приложенную к объекту, чтобы заставить его двигаться в каком-то направлении, мы хотели бы измерить силу, приложенную к объекту, чтобы заставить его вращаться. Последнее — это то, что на самом деле означает термин крутящий момент.Чем больше крутящий момент, тем тяжелее будет объекту перестать вращаться. Например, если вы создаете робота, который должен подниматься по склону, вам потребуется больший крутящий момент, приложенный к его колесам. Следующий термин, который мы рассмотрим, — это механическая сила. Для наших целей это будет частота вращения, умноженная на крутящий момент. Мощность, которую вы устанавливаете в настройках блоков перемещения, на самом деле является механической мощностью двигателя. Для удобства я буду называть его просто мощностью. Теперь давайте посмотрим на простую систему передач.Красная шестерня напрямую прикреплена к двигателю через ось. Это входная шестерня, и я буду называть ее ведущей. Синий, который подключен непосредственно к шине, или тот, который передает движение от системы передач, будет называться ведомой шестерней. Теперь посмотрим, как работает зубчатая передача. Как видите, ведомая шестерня вращается намного быстрее ведущей. Вы можете сосчитать зубья ведущей шестерни или просто поверьте мне, что их 40. Ведущая шестерня имеет только 8 зубцов. Таким образом, за один оборот ведущей шестерни через точку зацепления пройдет 40 зубцов, а для каждого зуба ведущей шестерни, проходящего через эту точку, должен пройти зуб ведомой шестерни.Но ведомая шестерня имеет только 8 зубцов, поэтому за один оборот красной шестерни, имеющей 40 зубцов, она сделает пять оборотов. Это означает, что мы увеличили скорость вращения в пять раз. Как я уже упоминал, скорость вращения, умноженная на крутящий момент, дает мощность. Мощность постоянная, поэтому не меняется. Итак, уравнение остается верным, даже если мы увеличили скорость вращения. Это означает, что мы уменьшили крутящий момент в пять раз. Итак, в этой системе мы увеличиваем скорость и уменьшаем крутящий момент.В таких случаях мы говорим, что повышаем скорость. В противоположной ситуации, когда меньшая шестерня с меньшим количеством зубцов является ведущей шестерней, а большая шестерня — ведомой шестерней, мы уменьшим скорость и увеличим крутящий момент. В этом случае мы делаем пониженную передачу. Наконец, давайте применим на практике то, что мы узнали до сих пор. Вот у меня три пятиминутных бота. У первого нет зубчатых передач. Второй настроен на пониженную передачу, а последний — на повышенную. Все три робота настроены двигаться вперед на 1 секунду на 100% мощности.Сначала запустим снаряженный.
Он зашел так далеко, но немного вернулся из-за инерции и люфта — термины, которые мы обсудим в будущих руководствах.
Далее у нас есть робот с редуктором. Этот робот имеет гораздо больший крутящий момент, но преодолел гораздо меньшее расстояние, чем робот с механическим приводом.
Наконец-то у нас есть робот без шестеренок. Он преодолел большее расстояние, чем робот с механическим приводом, но треть расстояния, пройденного роботом с механическим приводом. На этом мы остановимся на первой части урока по снаряжению.
Gear
Connect
(5-10 минут)
Шестерни представляют собой колеса с зубьями, которые входят в зацепление друг с другом. Поскольку зубы сцепляются вместе, они могут эффективно передавать силу и движение.
Знаете ли вы?
Не все шестерни круглые. Некоторые шестерни бывают квадратными, треугольными и даже эллиптическими.
Ведущая шестерня — это шестерня, которая приводится во вращение внешним усилием, например рукой или двигателем. Любая шестерня, которую вращает другая шестерня, называется ведомой шестерней или ведомой.Ведущая шестерня обеспечивает входную силу, а ведомая шестерня — выходную силу.
Использование зубчатой передачи может изменить скорость, направление и силу. Но всегда есть достоинства и недостатки. Например, у вас не может быть одновременно большей выходной силы и увеличения скорости.
Чтобы определить передаточное отношение двух зубчатых колес с зацеплением друг относительно друга, разделите количество зубьев ведомой шестерни на количество зубьев ведущей шестерни. Это называется передаточным числом.Если ведомая шестерня с 24 зубьями входит в зацепление с ведущей шестерней с 48 зубьями, то передаточное число составляет 1: 2. Это означает, что ведомая шестерня будет вращаться в два раза быстрее ведущей.
Шестерни используются во многих машинах, где необходимо контролировать скорость вращения и усилие поворота. Распространенные примеры включают электроинструменты, автомобили и взбиватели для яиц!
Construct
(5-10 минут)
Постройте следующие модели. Используйте идеи «Созерцать» ниже и в Рабочем листе учащегося, чтобы по очереди изучать каждую модель.
Build G1 book III, page 2
Build G2 book III, page 3
Build G3 book III, page 4
Build G4 book III, page 5-6
Build G5 book III, page 7-8
Build G6 book III , страницы 9–10
Сборка G7, книга III, страницы 11–14
Сборка G8, книга III, страницы 15–18
Сборка G9, книга III, страницы 19–22
Сборка G10, книга III, страницы 23–25
Contemplate
(10-15 минут)
G1
Эта модель показывает передаточное число 1: 1.Скорости ведущей шестерни и ведомой шестерни одинаковы, потому что у них одинаковое количество зубьев. Ведущая и ведомая шестерни вращаются в противоположных направлениях.
G2
Эта модель имеет передаточное число 1: 3. Ведущая шестерня большего размера вращает ведомую шестерню меньшего размера, в результате чего увеличивается скорость, но уменьшается выходное усилие. Это называется подготовкой к работе.
G3
Эта модель имеет передаточное число 3: 1. Меньший привод вращает большую ведомую шестерню, что приводит к снижению скорости, но увеличению выходной силы.Это называется понижением передачи.
G4
Эта модель имеет передаточное число 1: 1. Малая средняя шестерня — холостая. Промежуточная шестерня не влияет на передаточное число, скорость или выходное усилие ни ведущей, ни ведомой шестерен. Ведущая и ведомая шестерни вращаются в одном направлении и с одинаковой скоростью.
G5
Эта модель представляет собой составную передачу с передаточным числом 9: 1. Из-за этого значительно снижается скорость вращения и значительно увеличивается выходное усилие.Меньшая ведущая шестерня медленно вращает большую ведомую шестерню. Меньшая шестерня на той же оси, что и ведомая шестерня, теперь приводится в движение и медленно вращает вторую большую ведомую шестерню, заставляя ее вращаться еще медленнее.
G6
Эта модель показывает зубчатую передачу, настроенную для периодического движения, например ведомая шестерня ненадолго проворачивается, затем на мгновение останавливается. Скорость значительно снижается, поскольку движение происходит только тогда, когда ведомая шестерня входит в зацепление с одной из двух ведущих шестерен.
G7
Эта модель представляет собой угловую передачу с передаточным числом 1: 1. Две конические шестерни с зацеплением передают скорость и усилие без изменений, но под углом 90 °.
G8
В этой модели используется дифференциал с передаточным числом 28:20 или 7:10. Входная сила передается двум выходным силам под углом 90º. Когда один выходной указатель останавливается, скорость другого удваивается по сравнению с исходной скоростью. Когда оба выходных указателя остановлены, ручку нельзя повернуть.
G9
В этой модели показана червячная передача с передаточным числом 24: 1. Это значительно снижает скорость, поскольку требуется полный оборот червячной передачи, чтобы переместить шестерню выше на один зуб. Он меняет направление на 90º. Выходное усилие значительно увеличивается. Червячные передачи можно использовать только как ведущую.
G10
В этой модели показана реечная передача. В отличие от предыдущих передач, реечная шестерня может использоваться только для линейного движения, а не для вращения.При повороте ручки зубчатая рейка перемещается вперед или назад в зависимости от направления вращения маленькой шестерни (называемой шестерней).
(PDF) Характеристика и экспериментальная оценка ошибок зубчатой передачи в промышленном роботе
Только для ознакомления
9
Дагалакис, Н.Г., и Майерс, Д.Р. (1985), «Регулировка люфта зубчатой передачи робота с помощью робота
. метод совместного тестового возбуждения », International Journal of Robotics Research, Vol.4,
№ 2, с. 65-79.
Eastwood, S.J. (2004), «Отображение и анализ ошибок для гибридных кинематических машин», докторская диссертация,
Ноттингемский университет, Ноттингем.
Иствуд, С. и Уэбб, П. (2009), «Анализ значимости ошибок и компенсация для HPKM»,
Промышленный робот: Международный журнал, Vol. 36, № 1. С. 27-35.
ISO 9283 (1998), Управление промышленными роботами — критерии производительности и соответствующие тесты
Методы, Международная организация по стандартизации, Женева, Швейцария.
ISO 230–2 (1997), Правила испытаний для станков — Часть 2: Определение точности и
Повторяемость позиционирования осей с числовым программным управлением, Международная организация по стандартизации
, Женева, Швейцария.
Джадд Р.П. и Кнасински А.Б. (1990), «Метод калибровки промышленных роботов с экспериментальной проверкой
», IEEE Transactions on Robotics and Automation, Vol. 6. № 1,
с. 20–30.
Муэланер, Дж.Э., Ван З. и Маропулос П. (2010), «Концепции и анализ аэрокосмического робота с высокой точностью
и высокой производительностью (HAHC)», 21-я Международная конференция по автоматизированному производству
(CAPE 2010), Эдинбург, Великобритания.
Oh, Y.T (2011a), «Влияние угловых характеристик шарнира на точность промышленных роботов
», Industrial Robot: An International Journal, Vol. 38, No. 4. pp. 406-418
Oh, Y.T (2011b), «Оценка точности роботов с использованием системы шарнирно-стержневой связи», Robotica, Vol.29,
No. 6, pp. 917-927.
Шиаколас, П. С., Конрад, К. Л., и Йих, Т. К. (2002), «О точности, повторяемости и степени
влияния кинематических параметров промышленных роботов», Международный журнал
Modeling and Simulation, Vol. 22, No. 3, pp. 245-254.
Сламани М., Майер Дж. Р. Р. и Клотье Г. М. (2010), «Моделирование и экспериментальная проверка
ошибок движения станка с использованием полинома, оптимизированного по степени, включая гистерезис движения
», Experimental Techniques Journal, Vol.35, No. 1, pp. 37-44.
Сламани М., Нубиола А., Бонев И.А. (2012a), «Влияние сервосистем на контурные ошибки
в промышленных роботах», Труды Канадского общества механиков
Engineering, Vol. 36, No. 1, pp. 83-96.
Сламани М., Нубиола А. и Бонев И.А. (2012b), «Оценка эффективности позиционирования
промышленного робота», Industrial Robot: An International Journal, Vol. 39, No. 1, pp. 57-68.
Сламани, М., Нубиола А., Бонев И.А. (2012c), «Моделирование и оценка ошибки люфта
промышленного робота», Robotica, DOI: 10.1017 / S0263574711001287.
Whitney, D.E. Лозинский К.А. и Рурк Дж. М. (1986), «Метод и результаты прямой калибровки промышленного робота
», ASME Journal of Dynamic Systems, Measurement and Control, Vol. 108,
№ 1, с. 1-8.
Янг, К., Пиккин, К.Г. (2000), «Оценка точности современного промышленного робота»,
Industrial Robot: An International Journal, Vol.27, No. 6, pp. 427-436.
Страница 9 из 23 Промышленный робот
1
2
3
4
5
6
7
8
9
10
11
000
15
16
17
18
19
20
21
22
23
24
25
26
27
000
000000
000
000 3132
33
34
35
36
37
38
39
40
41
42
43
44
00050002 44000548
49
50
51
52
53
54
55
56
57
58
59
60
.